近年来,随着我国经济建设高速发展,地面空间的开发日益饱和,对地上空间的开发利用已经不能满足需求,越来越多的工程项目开始向地下发展,如地铁站、地下车库、地下商场、地下综合体,因此出现了大量与深基坑相关的工程.在进行基坑开挖过程中,保证基坑的稳定性及施工人员的安全性十分重要,支护结构及周围环境变形过大会引起很大的安全隐患,导致安全事故的发生.随着城市建设的愈发完善,许多工程位于人口密集、周围建筑物或管线密集的区域.基坑的支护结构除了满足自身要求外,还需要对支护结构及周围环境的变形进行控制,减小基坑工程对周围环境的影响.因此,有必要对基坑开挖过程中的变形规律进行研究,进一步形成支护结构变形预测方法,为基坑工程的支护结构设计及施工提供指导性意见.
基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况.
针对基坑工程中支护结构侧移预测问题,已经有学者通过有限元模拟、经验公式总结、理论解析解推导、机器学习等方法进行了研究,但仍存在一定的局限性.经验公式和理论解析解难以准确计算基坑开挖过程中各时刻支护结构的变形,在基坑开挖过程中,可能会出现内部支护失效、周边环境变化等突发情况,通过相关公式难以充分考虑这些突发情况对围护结构变形的影响.与上述两种方法相比,数值模拟能更好地考虑围护结构周围环境参数对围护结构变形的影响,并能模拟施工各阶段的变形,但模型的建立耗时较长,建模所需的参数范围较大.建模值具有一定的随机性,难以验证仿真结果的准确性和有效性.机器学习算法在岩土工程领域得到了应用,可以有效地预测基坑开挖过程中围护结构的变形和地表沉降的情况,与上述3种预测方法相比,该方法具有学习速度快、预测模型实时更新、预测精度高等优点.但现有的预测模型大多是针对同一工程项目中不同时间序列的支护结构变形,不能预测不同基坑设计方案下支护结构的最大侧移,而且大多数考虑时间序列的变形预测模型只考虑了时间因素对变形的影响,忽略了其他因素对变形的影响,造成特征数据的浪费.
基于此,引入支持向量机模型和人工神经网络中的多层感知器模型,对基坑开挖引发的支护结构最大侧移进行了预测;引入长短期记忆(LSTM)和门循环单元(GRU)两种改进后的循环神经网络模型,对基坑开挖不同阶段的支护结构侧移进行了预测;并进一步探究了这几种模型的预测效果及输入步长对预测效果的影响.
1 机器学习模型
1.1 支持向量机模型
支持向量机(SVM)由Vapnik等[21 ⇓ ⇓ -24 ] 在20世纪90年代提出.在早期,这种方法被用于统计学习领域,可以通过对小样本数据的学习,来探究样本数据之间的规律.
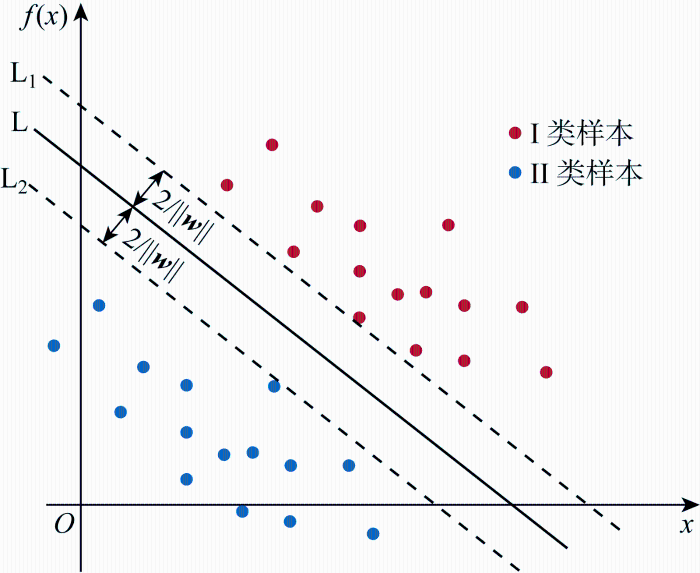
SVM的核心理论是找到数据归类的最优超平面,如图1 所示.图中:f (x )为最优超平面函数;w 为最优超平面的法向量;红色(I类)和蓝色(II 类)的点依次代表两类数据样本;L为分类线;L1 为穿过I类样本数据、平行于分类线且与分类线距离最近的线;L2 为穿过 II 类样本数据、平行于分类线且与分类线距离最近的线.最优超平面应该满足,L能将两组数据样本归类,且L1 与L2 的相距最大.
图1
图1
SVM最优超平面示意图
Fig.1
Schematic diagram of SVM optimal hyperplane
对于回归问题,可以使用SVM中的支持向量机回归(SVR)模型,如图2 所示.图中L1 、L2 为穿过样本数据、与回归线平行且相距最远的线.最优超平面应该满足,所有样本数据都在L1 与L2 之间的区域,且L1 与L2 的相距最小.
图2
图2
SVR最优超平面示意图
Fig.2
Schematic diagram of SVR optimal hyperplane
对于线性可分样本,可以直接在原始空间中找到最优分类面;对于非线性可分样本,通过引入核函数,将输入特征量从低维空间变换到更高维的空间,并在新建的高维空间中找到最优分类面.最优超平面的计算公式如下:
(1) $\begin{array}{l} f(x)= \operatorname{sgn}(\boldsymbol{w} \cdot \boldsymbol{\Phi}(x)+\boldsymbol{b})= \\\operatorname{sgn}\left({ }^{\prime} a_{j} y_{j} \boldsymbol{\Phi}\left(x_{i}\right) \cdot \boldsymbol{\Phi}\left(x_{j}\right)+\boldsymbol{b}\right), \\\boldsymbol{\Phi}(x) \in \boldsymbol{H}\end{array}$
式中:yj 为xj 的类标记;w* 为最优权值向量;b * a j * l 为数据样本集的数量;Φ x )为特征向量;H
1.2 多层感知器模型
多层感知器(MLP)模型是一种基本的ANN模型.最早由Rosenblatt[25 ] 在20世纪60年代提出.MLP模仿人脑在处理问题时的工作机制,大脑由多个神经元连接在一起,当一个神经元接收到来自其他神经元的信号时,它会产生刺激,将信号经过处理后传输给其他神经元,神经元重复地传输信号,并且不断调整反馈输入和输出信号之间的关系.
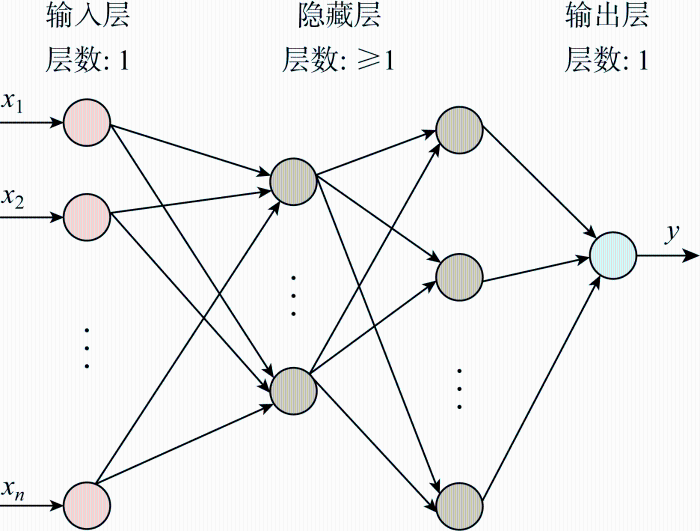
在处理回归问题时,MLP的基本结构如图3 所示.神经网络由输入层、隐藏层和输出层组成.隐藏层的数量根据问题的情况而变化.特征数据通过输入层输入,输入数据由隐藏层神经元进行处理和学习,神经元的输入输出值通过决策函数进行变换,最后通过输出层输出预测结果.一般来说,隐层的层数越多,每层神经元的个数越多,模型的拟合能力越强,但过多的隐藏层和过多的神经元也可能导致过拟合.
图3
图3
MLP模型示意图
Fig.3
Schematic diagram of MLP model
神经元上的决策函数模拟了人脑处理问题时激活神经元的过程,因此也叫激活函数.激活函数可以在神经元中引入非线性因素,使神经网络能够处理非线性问题.在本文中,使用ReLU激活函数,如下式所示:
(2) $f_{\max}(x)=\max\{0,x\}$
当输入值小于或等于0时,下一层中的神经元将不被激活.当输入值大于0时,下一层的神经元将被激活.这种激活函数在运算过程中收敛速度快,在机器学习领域得到了广泛的应用.
1.3 长短期记忆网络模型
LSTM最早由Hochreiter和Schmidhuber[26 ] 在1997年提出.LSTM模型是一种考虑时序性输入参数的人工神经网络模型,与MLP相比,该模型考虑了不同时序输出量之间的影响,在预测时序性数据时更准确.与传统的循环神经网络(RNN)模型相比,LSTM引入了门控单元,解决了传统RNN模型在输入数据过大时梯度可能消失的问题.
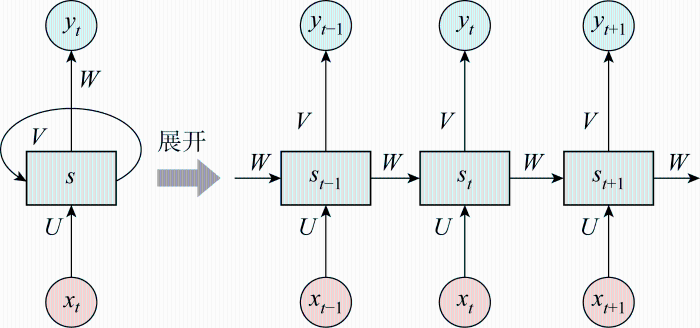
图4 是传统RNN模型的示意图.图中:yt 、yt -1 、yt +1 为时间t 、t -1、t +1的输出值;st 、st -1 、st +1 分别为时间t 、t -1、t +1的记忆;xt 、xt -1 、xt +1 为时间t 、t -1、t +1的输入值;U 、V 、W 为权重参数.
图4
图4
传统RNN模型示意图
Fig.4
Schematic diagram of traditional RNN model
(3) $y_{t}=G\left(V s_{t}\right) $
(4) $s_{t}=F\left(U x_{t}+W s_{t-1}\right)$
式中:F (x )、G (x )为激活函数,其中F (x )通常使用tanh、ReLU、Sigmoid激活函数,G (x )通常使用Softmax激活函数.
如图5 所示,LSTM单元由遗忘门、输入门、输出门组成.遗忘门通过Sigmoid函数对xt 、yt -1 进行激活,Sigmoid函数的输出值在0~1之间,只有当σ =1时,对应的信息才会被完整的保存下来;输入门对输入值和前一个单元格的状态执行更新;输出门通过对输入值和当前单元状态的处理,得到时间t 的输出值.
图5
图5
LSTM单元示意图
Fig.5
Schematic diagram of LSTM unit
1.4 门循环单元模型
GRU模型是LSTM的简化模型,由Cho等[27 ] 于2014年首次提出.与LSTM模型相比,GRU模型结构更简单,结构参数更少,因此在同等条件下,GRU模型计算量更小,训练时间更短.
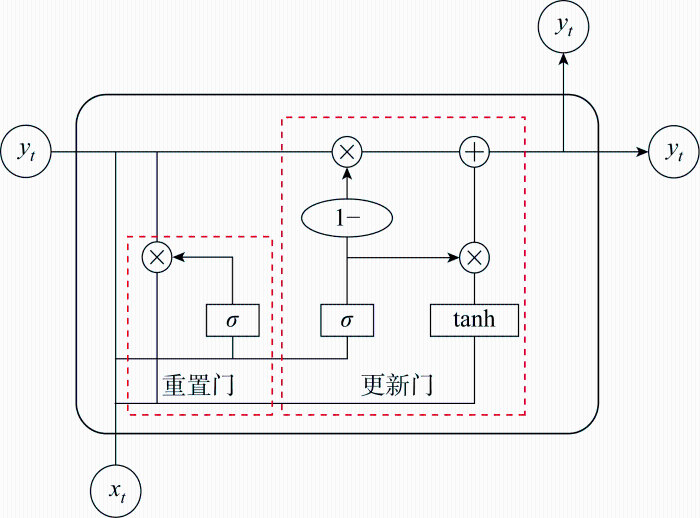
如图6 所示,GRU单元由重置门、更新门组成.重置门对输入值和上个单元的隐藏状态进行激活.
图6
图6
GRU单元示意图
Fig.6
Schematic diagram of GRU unit
2 支护结构最大侧移预测模型
2.1 数据集构建
支护结构最大水平位移预测模型的研究资料取自徐中华[28 ] 根据岩土工程领域已出版的专著、各类期刊和论文编制的上海地区基坑工程变形实测案例数据库,数据集包括上海地区的89个基坑工程的实测数据.该数据集包括水文地质参数、施工参数、基坑设计参数和测量的最大水平位移.在本节中,通过SVM和MLP模型来预测支护结构的最大侧移.随机选取总数据集70%的数据(即62个)作为模型的训练集,剩余30%的数据(即27个)作为模型的测试集.根据国内外对基坑支护结构变形影响因素的研究和数据库涉及实际工程的情况,主要关注基坑设计参数对支护结构侧移的影响,选取基坑开挖深度x 1 、地下连续墙厚度x 2 、支护结构长度x 3 、支护结构单位长度抗弯刚度x 4 、内支撑数量x 5 、首道内支撑距离地面深度x 6 、内支撑平均间隔x 7 、支护类型x 8 这8个主要因素作为模型的输入量,支护结构最大侧移y 为输出量.x 8 =1时对应支护结构与地下主体结构相结合的支护方式;x 8 =2时对应顺作法的地下连续墙支护方式.
由于数据集的参数范围和单位的差异很大,所以需要对数据集的参数进行预处理,以加快神经网络模型的收敛速度.对于参数x 1 ~x 7 和y 使用归一化方法对数据进行预处理,使这些参数的数值分布在[0,1]的范围内.具体计算方法如下式:
(5) $x_\mathrm{norm}=\frac{x-x_\mathrm{min}}{x_\mathrm{max}-x_\mathrm{min}}$
式中:x norm 为归一化处理后的参数;x 为归一化处理前的参数;x max 为归一化处理前的最大参数;x min 为归一化处理前的最小参数.
对于x 8 该分类特征类型的参数,通过独热编码对数据进行预处理,并通过2位状态寄存器对2个支持类型的状态进行编码.
2.2 模型建立及训练
采用SVM和MLP模型支护结构最大侧移的预测进行训练,并随机选取样本数据的10%作为验证集,以验证训练模型的准确性.
通过随机搜索算法和参数优化经验调整模型所需的超参数.在优化过程中,通过损失函数监督神经网络的学习过程,计算预测模型在当前迭代次数下的损失.对于回归问题,经常使用均方误差损失函数,计算公式如下:
(6) $E_{\mathrm{MSE}}\left(g, g^{\prime}\right)=\frac{1}{m} \sum_{i=1}^{m}\left(g_{i}-g_{i}^{\prime}\right)^{2}$
式中:m 为样本数据数量;g 为实测的输出值;g' 为预测的输出值. 对于同一模型,E MSE (g , g' )取值越小,模型准确度越高
在训练过程中,为了防止训练模型过拟合,增加L2正则化,并对原损失函数项和正则项比例进行加权,优化原损失函数.计算公式如下:
(7) $f_{\text {loss }}^{\prime}(x)=f_{\text {loss }}(x)+\frac{\lambda}{2 m} \sum w_{i}^{2}$
式中:f loss (x )为原有的损失函数;f' loss (x )为L2正则化后的损失函数;λ 为正则项的权重.
最终确定SVM模型参数取值:惩罚系数为1、核函数为Gauss径向基核函数、回归精度epsilon为0.1.MLP模型参数取值:隐藏层层数为3、神经元数量为64、学习率为 0.000 5、激活函数为ReLU函数、训练步数为 5 000.
3 不同阶段支护结构侧移预测模型
3.1 数据集构建
不同阶段支护结构水平位移预测模型数据取自杭州市某高铁站基坑工程实测数据,该车站为地下三层双柱三岛式车站,基坑总长约457 m,开挖宽度22 m,开挖深度26.05 m,基坑底部主要位于粉砂层.基坑标准段采用明挖顺作法施工,支护结构由 1 m 厚的地下连续墙、7道内支撑及2个换钢支撑组成.数据集选择CX23监测点的支护结构侧移数据进行预测和分析.总共收集80期数据,因用于预测的模型考虑了时序性输入,所以按照测量时间的顺序对训练集和测试集进行分组更合理,前64期数据作为训练集,后16期数据作为测试集.由于施工过程中各监测点周围的水文地质条件及基坑设计参数保持不变,对支护结构变形的影响可以忽略不计,本节预测模型的影响因素主要考虑施工参数.根据国内外对基坑支护结构变形影响因素的研究,结合工程实际情况,选取基坑开挖深度X 1 、开挖阶段X 2 、第1道混凝土钢结构支撑轴力X 3 、第5道混凝土钢结构支撑轴力X 4 、第2道钢支撑轴力X 5 、第3道钢支撑轴力X 6 、第4道钢支撑轴力X 7 、距离开工时间X 8 、侧移变化速率X 9 这9个主要因素作为模型的输入,支护结构侧移Y 为输出量.
部分样本数据如表1 所示.对于参数X 1 ~X 9 和Y ,使用归一化方法对数据进行预处理,使这些参数的数值分布在[0,1]的范围内.具体计算方法见式(5).
对于X 2 该分类特征类型的参数,通过独热编码对数据进行预处理,并通过7位状态寄存器对7个施工阶段进行编码,X 2 取值及对应施工阶段如表2 所示. 表中:h 为基坑开挖深度.
3.2 模型建立及训练
采用MLP、LSTM、GRU模型不同阶段支护结构侧移的预测进行训练,并随机选取样本数据的10%作为验证集,以验证训练模型的准确性.
通过随机搜索算法和参数优化经验调整模型所需的超参数.在优化过程中,利用均方误差损失函数,计算公式见式(6),来监督神经网络的学习过程,计算预测模型在当前迭代次数下的损失.为了训练模型过拟合,向损失函数添加L2正则化项以形成新的损失函数,计算公式见式(7).
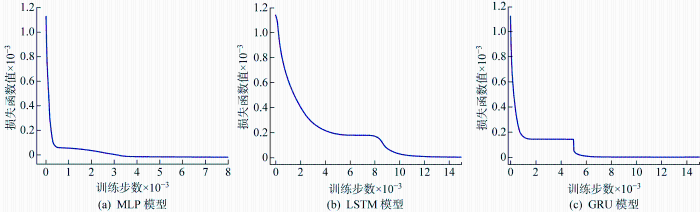
最终确定各模型参数取值如表3 所示,在该参数组合下的损失函数如图7 所示.由图7 可知,随着训练步数的增加,训练集的损失逐渐减少.MLP模型在训练步数达到约4 500时逐渐收缩,LSTM模型在训练步数达到约13 000时逐渐收敛,GRU模型在训练步数达到约8 000时逐渐收敛,损失减小到最小值附近.LSTM和GRU模型有两个收敛平台,这可能是由于训练数据集分布不均匀,导致训练过程中出现局部最优解.在第1个收敛平台阶段,模型参数更新速度较快,但随着训练步长的增加,模型仍处于局部最优解状态,损失函数值基本不变.在第2个收敛平台中,模型参数的更新速度变慢,但随着训练步长的增加,模型跳出了局部最优解,模型的表达能力得到了提高.此时,模型具有较好的泛化能力,可用于预测新的数据.
图7
图7
损失函数与训练步数关系
Fig.7
Relation between loss function and training steps
4 预测结果分析
4.1 支护结构最大侧移预测
基于2.2节中的最优参数值,分别采用SVM和MLP模型对不同基坑支护结构的最大侧移进行预测.训练数据来自文献[28 ]中随机选择的62组数据,经过训练和交叉验证,得到上述两个模型对应的预测模型,并对样本数据剩余的27组数据进行预测,图8 为各模型最优参数组合下测试集回归效果对比图.
图8
图8
各模型测试集回归效果
Fig.8
Regression effect of each model test set
从图8 可以看出,SVM模型和MLP模型在预测支护结构最大侧移时表现较好,其中MLP模型预测值与实测值的误差主要在10%以内,SVM模型的误差范围主要在20%以内.相比之下,MLP模型在预测包络线最大位移时具有更高的准确度和精度.这是因为与SVM模型相比,MLP模型具有更好的泛化能力和更精确的预测模式,它的神经元结构具有更强的学习能力,可以学习更多的特征信息,从而提高预测精度.
表4 给出了各模型预测结果的评价指标值.表中:R 2 为决定系数,
(8) $R^{2}\left(g, g^{\prime}\right)=1-\frac{\sum_{i=1}^{m}\left(g_{i}-g_{i}^{\prime}\right)^{2}}{\sum_{i=1}^{m}\left(g_{i}-\bar{g}\right)^{2}}$
式中:g - .R 2 (g , g' )取值在[0,1]的范围内,取值大小可以反映输入参数对输出参数的解释程度,值越大,模型拟合效果越好.通过比较两个模型的R 2 值,可以看出MLP的整体预测效果优于SVM.
综上所述,MLP模型在支护结构最大侧移预测的表现更好,是一个更可靠和准确的预测模型.在实际基坑工程中,可优先考虑采用基于机器学习的MLP模型,为工程的稳定性、安全性分析提供可靠的参考数据.
4.2 不同阶段支护结构侧移预测
基于表3 中的最优参数值,分别使用MLP、LSTM和GRU模型预测水平位移不同阶段的包络结构.训练数据来自对应于表1 中编号1~64的数据.通过训练和交叉验证得到上述3个模型对应的预测模型,并对样本数据的最后16组数据进行预测.预测结果与实测对比如图9 所示.
图9
图9
预测结果与实测对比
Fig.9
Comparison of predicted results and actual measurements
由图9(a) 可以看出,MLP模型的预测误差范围约为-1.46~1.50 mm,其中最大绝对误差值为1.50 mm,最小绝对误差值为0.15 mm.由图9(b) 可以看出,LSTM模型的预测误差范围约为-1.42~1.17 mm,其中最大误差的绝对值为1.42 mm,最小误差的绝对值为0.05 mm.由图9(c) 可以看出,GRU模型的预测误差范围约为-1.21~1.43 mm,其中最大绝对误差值为1.43 mm,最小绝对误差值为0.04 mm.根据3种模型的预测结果,MLP、LSTM和GRU模型的支护结构侧移的预测值与实测值一致,预测误差范围在1.5 mm以内,满足实际工程对支护结构侧移测量误差的要求.这3种模型对基坑开挖过程中不同阶段的支护结构侧移预测具有较高的精度.
表5 给出了每个模型的均方误差、决定系数和预测时间.通过比较3种模型的R 2 值和预测用时,可以看出总体预测效果GRU>LSTM>MLP.LSTM和GRU模型考虑了时间序列对产出结果的影响.与MLP模型相比,输入参数的特征更接近基坑开挖的真实情况,预测结果更准确.通过比较3种模型的预测时间,可看出预测速度MLP>GRU>LSTM,与其他两个RNN模型相比,MLP的神经元数量较少,每个神经元之间只有一个连接,没有回路结构,在处理数据时可以并行计算每个神经元的输出.与LSTM模型相比,GRU的单元结构更简单,这使得GRU的计算量小于LSTM,此外,GRU的参数数量也比LSTM少,减少了内存消耗和大模型存储,加快了数据处理速度.
4.3 输入步长分析
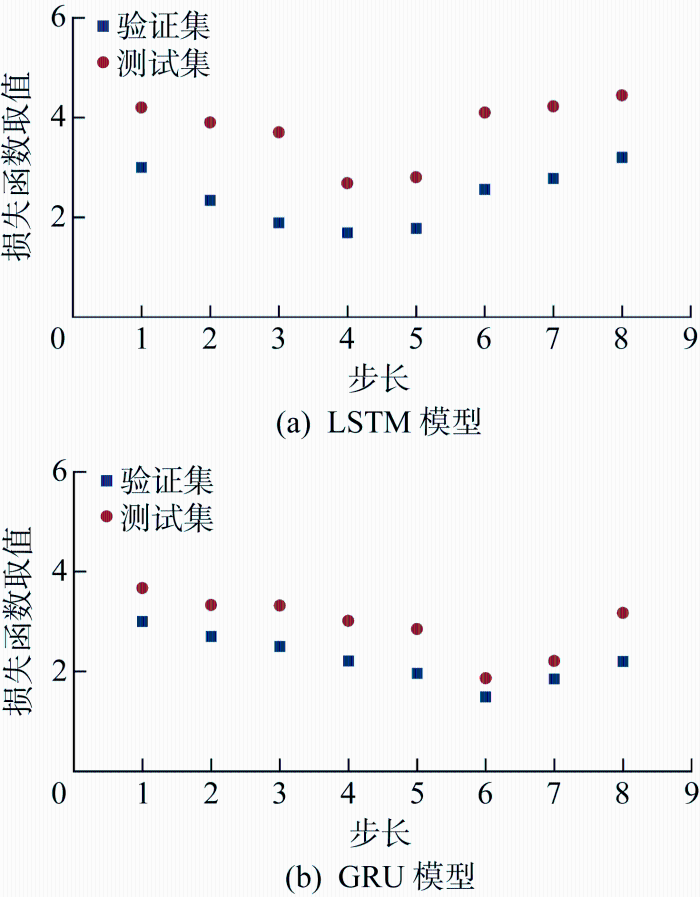
LSTM和GRU考虑了输入参数按时间序列顺序输入的影响,与MLP模型相比增加了步长参数的概念.例如,在预测时间序列t 的支护结构侧移时,需要考虑从t -n 到t -1时间序列的隐藏状态对时间序列t 侧移的影响,其中n 是输入步长参数.为了探索步长参数对预测效果的影响,在保持其他参数不变的情况下,改变模型的步长,得到不同取值的损失函数,如图10 所示.
图10
图10
不同步长对应的损失函数值
Fig.10
Values of loss function corresponding to different steps
从图10(a) 可以看出,对于LSTM模型,步长为4的预测模型具有最小的损失函数值;当步长小于4时,预测模型的损失函数随着步长的增大而减小,向预测模型输入更多的时间序列较小的序列数据,可以为模型带来更多的用于学习的历史数据,使得预测模型更加准确;当步长大于4时,预测模型的损失函数随着步长的增大而增大,用训练集训练的模型比用步长为4训练的模型更接近过拟合现象.从图10(b) 可以看出,对于GRU模型,步长为6预测模型具有最小的损失函数值;当步长小于6时,预测模型的损失函数随着步长的增大而减小;当步长大于6时,预测模型的损失函数随步长的增大而增大.
综上所述,对于考虑时间序列的支护结构侧移预测模型,增加输入步长可以在一定程度上提高模型预测精度,但步长过大也会导致模型过拟合.对于不同的模型,最优输入步长的取值可能不同,这是因为不同的模型设置了不同的超参数,比如学习率、隐层数、神经元数等,这些参数的不同设置可能导致需要不同的输入序列长度以获得更好的性能.
5 结论
(1) SVM和MLP模型在预测不同基坑支护结构最大侧移时有较好表现,预测误差大部分在 ±20% 范围内.与SVM模型相比,MLP神经元结构具有更强的学习能力,可以学习到更多的特征信息,预测精度更高.
(2) MLP、LSTM和GRU模型对不同阶段支护结构变形的预测结果误差范围均在1.5 mm以内,3种模型均能准确预测基坑开挖过程中支护结构的变形,满足实际工程测量精度要求.与传统的神经网络MLP模型相比,LSTM和GRU两个RNN模型考虑了时间输入对输出的影响,能够捕捉到时间输入之间的依赖关系,更接近基坑开挖过程中支护结构变形的实际情况,预测效果更好.
(3) 对于考虑时间序列输入的支护结构侧移预测模型,增大输入步长可以在一定程度上提高模型的预测精度,但步长过大也会导致模型过拟合.对于不同的模型,由于模型参数的不同,最优输入步长可能不同.
(4) 提出的基于机器学习的变形预测方法与传统的有限元模拟、公式计算等变形预测方法相比,计算速度更快,并可根据工程实测数据实时更新和预测,有助于及时规划工程下一步施工工艺.
参考文献
View Option
[1]
徐中华 , 王建华 , 王卫东 . 上海地区深基坑工程中地下连续墙的变形性状
[J]. 土木工程学报 2008 (8 ): 81 -86 .
[本文引用: 1]
XU Zhonghua WANG Jianhua WANG Weidong Deformation behavior of diaphragm walls in deep excavations in Shanghai
[J]. China Civil Engineering Journal 2008 (8 ): 81 -86 .
[本文引用: 1]
[2]
陈保国 , 闫腾飞 , 王程鹏 , 等 . 深基坑地连墙支护体系协调变形规律试验研究
[J]. 岩土力学 2020 , 41 (10 ): 3289 -3299 .
[本文引用: 1]
CHENG Baoguo YAN Tengfei WANG Chengpeng et al Experimental study on compatible deformation of diaphragm wall support system for deep foundation pit
[J]. Rock and Soil Mechanics 2020 , 41 (10 ): 3289 -3299 .
[本文引用: 1]
[3]
PENG X KIANOOSH H Sliding stability and lateral displacement analysis of reinforced soil retaining walls
[J]. Geotextiles and Geomembranes 2019 , 47 : 483 -492 .
[本文引用: 1]
[4]
孙小力 , 孙铁成 , 张旭 , 等 . 地铁基坑开挖数值模拟及变形特征研究
[J]. 施工技术 2020 , 49 (7 ): 41 -44 .
[本文引用: 1]
SUN Xiaoli SUN Tiecheng ZHANG Xu et al Research on numerical simulation and deformation characteristics of subway foundation excavation
[J]. Construction Technology 2020 , 49 (7 ): 41 -44 .
[本文引用: 1]
[5]
RITWIK N DEEPANKAR C Displacement-controlled approach for the analysis of embedded cantilever retaining walls with a distanced strip surcharge
[J]. Computers and Geotechnics 2022 , 151 : 104970 .
[本文引用: 1]
[6]
乔世范 , 蔡子勇 , 张震 , 等 . 南沙港区软土狭长深基坑围护体系性状
[J]. 浙江大学学报(工学版) 2022 , 56 (8 ): 1473 -1484 .
[本文引用: 1]
QIAO Shifan CAI Ziyong ZHANG Zhen et al Behavior of retaining system of narrow-long deep foundation pit in soft in Nansha Port Area
[J]. Journal of Zhejiang University (Engineering Science) 2022 , 56 (8 ): 1473 -1484 .
[本文引用: 1]
[7]
秦会来 , 黄俊 , 李奇志 , 等 . 深厚淤泥地层深基坑变形影响因素分析
[J]. 岩土工程学报 2021 , 43 (Sup.2) : 23 -26 .
[本文引用: 1]
QIN Huilai HUANG Jun LI Qizhi et al Influencing factors for deformation of deep foundation pits in thick mud stratum
[J]. Chinese Journal of Geotechnical Engineering 2021 , 43 (Sup.2) : 23 -26 .
[本文引用: 1]
[8]
刘新荣 , 王林枫 , 陈峰 , 等 . 内撑式地连墙变形特征及其参数优化研究
[J]. 地下空间与工程学报 2021 , 17 (3 ): 727 -738 .
[本文引用: 1]
随着国内深基坑工程的不断发展,越来越多的基坑支护形式被提出并得到了广泛的实践,为了保证基坑工程的安全,限制基坑变形与保护周边环境,选用适当的支护形式与支护参数显得尤为重要。本文依托广州新白云国际机场第二高速公路北段暗埋隧道深基坑工程,采用有限差分软件FLAC<sup>3D</sup>建立数值模型,取地连墙厚度、地连墙入土深度、横向支撑布置形式3个变量,探讨了不同支护参数取值对内撑式地连墙支护结构中地连墙侧向位移和支撑轴力分布的影响,提出合理的支护参数取值建议与优化效果。结果表明,基坑存在明显的坑角约束作用,限制坑角地连墙侧移与支撑轴力;地连墙整体侧移在地连墙厚度0.6~0.8 m时明显较大,且由于刚度不足出现反弯点;地连墙底部嵌固作用可有效限制侧移量,地连墙侧移随开挖深度变化曲线呈现“中间大,两头小”的抛物线形状;将支撑整体下移2 m,可有效减小墙体最大侧移,改善支护效果。
LIU Xinrong WANG Linfeng CHEN Feng et al Research on deformation characteristics and parameter optimization of diaphragm wall with interior bracing structure
[J]. Chinese Journal of Underground Space and Engineering 2021 , 17 (3 ): 727 -738 .
[本文引用: 1]
With the continuous development of deep foundation pit engineering in China, more and more foundation pit supporting forms have been proposed and widely practiced. In order to ensure the safety of foundation pit engineering, limit the deformation of foundation pit and protect the surrounding environment, it is particularly important to select appropriate supporting forms and supporting parameters. In this paper, based on the northern section of Guangzhou New Baiyun International Airport Highway No.2 dark buried tunnel deep foundation pit engineering, the finite difference software FLAC<sup>3D</sup> numerical model was set up, taking wall thickness, buried depth, and horizontal support as three variables, to discuss the variation of the lateral displacement of the wall and supporting axial force distribution. The reasonable value of support parameters and optimization results were proposed. The results show that the foundation pit has obvious angle constraint, which limits the lateral movement of the ground connecting wall and the axial force of the support. When the thickness of the ground connecting wall is 0.6m~0.8m, the overall lateral movement of the ground connecting wall is obviously larger, and the reverse bending point occurs due to insufficient stiffness. The bottom of the wall can be fixed to limit the lateral movement. The curve of lateral movement of the wall with the depth of excavation presents a parabolic shape of “big in the middle, small at both ends”. Moving the overall support down 2 m can effectively reduce the maximum lateral movement of the wall and improve the supporting effect.
[9]
钟俊辉 , 尹培林 , 滕超 , 等 . 福州软土地区地铁车站基坑墙体变形特性分析
[J]. 地下空间与工程学报 2018 , 14 (Sup.2) : 821 -827 .
[本文引用: 1]
ZHONG Junhui YIN Peilin TENG Chao et al The diaphragm walls of deformation properties of excavation for metro stations in Fuzhou soft soil deposits
[J]. Chinese Journal of Underground Space and Engineering 2018 , 14 (Sup.2) : 821 -827 .
[本文引用: 1]
[10]
申正洋 , 黄华 , 李新生 , 等 . 深大基坑中冠梁的变形特征及一种新型冠梁
[J]. 工程地质学报 2023 , 31 (2 ): 661 -670 .
[本文引用: 1]
HUANG Zhengyang HUANG Hua LI Xinsheng et al Deformation characteristics of conventional and new top beams in deep and large foundation pit with numerical simulations
[J]. Journal of Engineering Geology 2023 , 31 (2 ): 661 -670 .
[本文引用: 1]
[11]
居玥辰 , 宫全美 , 赵昱 , 等 . 软土基坑开挖引起地下连续墙水平变形的能量法
[J]. 地下空间与工程学报 2021 , 17 (6 ): 1762 -1774 .
[本文引用: 1]
针对软土基坑开挖引起的地下连续墙水平变形计算问题,为克服以往解析方法的不足,提出了能量计算法。通过分析其典型变形模式,提出了适用于5种约束条件下的水平变形统一数学表达式;考虑地下连续墙非极限状态土压力,根据3种滑动面模型推导出相应的侧土压力表达式,进而建立整个围护系统总势能,利用最小势能原理,推导了地下连续墙水平变形的解析解。分别计算3种滑动面模型下的水平变形,并与基坑实测数据进行了对比验证,分析了各滑动面模型应用于地下连续墙水平变形计算的合理性。研究表明:对于内凸及复合式、悬臂式、踢脚式变形模式中,分别采用直线及对数螺线组合型、圆弧型、直线型滑动面较为合理,而三者对应的约束条件分别为两端固定、顶端自由底端固定、顶端固定底端平动。
JU Yuechen GONG Quanmei ZHAO Yu et al Energy method for horizontal deformation of diaphragm wall due to soft soil foundation pit excavation
[J]. Chinese Journal of Underground Space and Engineering 2021 , 17 (6 ): 1762 -1774 .
[本文引用: 1]
Aiming at the calculation of the horizontal deformation of the diaphragm wall caused by the excavation of the soft soil foundation pit and in order to overcome the shortcomings of the previous analytical methods, an energy calculation method was proposed. By analyzing the typical deformation modes, a unified mathematical expression for the horizontal deformation under five constraints was proposed. Considering the non-limit state earth pressure of the wall, the corresponding lateral earth pressure was derived according to three slip surface models; then the total potential energy of the enclosure structure system was established, and the analytical solution of the horizontal deformation of the diaphragm was derived by using the principle of minimum potential energy. The horizontal deformation was calculated by three slip surface models respectively and compared with the measured data of the several foundation pits. The rationality of each slip surface model applied to the horizontal deformation calculation of the diaphragm wall was analyzed. The results show that in the convex/compound, cantilever, and kick-in deformation modes, the straight and logarithmic spiral, circular, and linear sliding surfaces, respectively are more reasonable, and the corresponding constraints for the three are the two ends fixed, top free bottom fixed, and top fixed bottom translated.
[12]
张福海 , 周玉石 , 刘学港 , 等 . 基于斜桩支护的框架结构基坑变形分析
[J]. 山东大学学报(工学版) 2022 , 52 (1 ): 58 -65 .
[本文引用: 1]
ZHANG Fuhai ZHOU Yushi LIU Xuegang et al Deformation analysis of frame structure foundation pit based on inclined pile support
[J]. Journal of Shandong University (Engineering Science) 2022 , 52 (1 ): 58 -65 .
[本文引用: 1]
[13]
涂芬芬 . 深基坑开挖对邻近既有建筑变形影响研究
[J]. 土工基础 2022 , 36 (1 ): 5 -8 .
[本文引用: 1]
TU Fenfen Influence of deep excavation induced deformation on the adjacent buildings
[J]. Soil Engineering and Foundation 2022 , 36 (1 ): 5 -8 .
[本文引用: 1]
[14]
尹利洁 , 李宇杰 , 朱彦鹏 , 等 . 兰州地铁雁园路站基坑支护监测与数值模拟分析
[J]. 岩土工程学报 2021 , 43 (Sup.1) : 111 -116 .
[本文引用: 1]
YIN Lijie LI Yujie ZHU Yanpeng et al Monitoring and numerical simulation of support for foundation pit at Yanyuan Road Station of Lanzhou Metro
[J]. Chinese Journal of Geotechnical Engineering 2021 , 43 (Sup.1) : 111 -116 .
[本文引用: 1]
[15]
周勇 , 王旭日 , 朱彦鹏 , 等 . 强风化软硬互层岩质高边坡监测与数值模拟
[J]. 岩土力学 2018 , 39 (6 ): 2249 -2258 .
[本文引用: 1]
ZHOU Yong WANG Xuri ZHU Yanpeng et al Monitoring and numerical simulation of an interbedding high slope composed of soft and hard strong-weathered rock
[J]. Rock and Soil Mechanics 2018 , 39 (6 ): 2249 -2258 .
[本文引用: 1]
[16]
张超翔 , 张志强 . 深基坑桩锚支护结构位移分析及数值模拟
[J]. 科学技术与工程 2022 , 22 (18 ): 8022 -8029 .
[本文引用: 1]
ZHANG Chaoxiang ZHANG Zhiqiang Displacement analysis and numerical simulation of pile-anchor retaining structure in deep foundation pit
[J]. Science Technology and Engineering 2022 , 22 (18 ): 8022 -8029 .
[本文引用: 1]
[17]
蔡建军 , 谢璨 , 李树忱 , 等 . 复杂条件下深基坑多层支护方法及数值模拟研究
[J]. 工程力学 2018 , 35 (2 ): 188 -194 .
[本文引用: 1]
CAI Jianjun XIE Can LI Shuchen et al Multi-larger supporting method and numerical simulation for deep foundation pit under complex condition
[J]. Engineering Mechanics 2018 , 35 (2 ): 188 -194 .
[本文引用: 1]
[18]
王恩钰 , 周海祚 , 郑刚 , 等 . 基坑倾斜桩支护的变形数值分析
[J]. 岩土工程学报 2019 , 41 (Sup.1) : 73 -76 .
[本文引用: 1]
WANG Enyu ZHOU Haizuo ZHENG Gang et al Numerical analyses of deformation of inclined pile-retained excavations
[J]. Chinese Journal of Geotechnical Engineering 2019 , 41 (Sup.1) : 73 -76 .
[本文引用: 1]
[19]
张雯超 , 史培新 , 刘维 , 等 . 基于改进KNN与基坑参数对地连墙变形预测研究
[J]. 华中科技大学学报(自然科学版) 2021 , 49 (9 ): 101 -106 ..
[本文引用: 1]
ZHANG Wenchao SHI Peixin LIU Wei et al Research on deformation prediction of diaphragm wall based on improved KNN and parameters of subway deep excavation
[J]. Journal of Huazhong University of science and Technology(Natural Science Edition) 2021 , 49 (9 ): 101 -106 .
[本文引用: 1]
[20]
KUNG G T C HSIAO E C L SCHUSTER M et al A neural network approach to estimating deflection of diaphragm walls caused by excavation in clays
[J]. Computers & Geotechnics 2007 , 34 (5 ): 385 -396 .
[本文引用: 1]
[21]
VAPNIK V N The nature of statistical learning theory [M]. New York,USA : Springer-Verlag , 1995 .
[本文引用: 1]
[22]
BOSER B GUYONG I VAPNIK V A training algorithm for optional margin classifiers
[C] //Proceedings of The Fifth Annual Workshop on Computational Learning Theory . New York,USA : ACM Press , 1992 : 144 -152 .
[本文引用: 1]
[23]
CORTES C VAPNIK V Support-vector networks
[J]. Machine Learning 1995 , 20 : 273 -297 .
[本文引用: 1]
[24]
SCHOLKOPF B BURGES C VAPNIK V Extracting support data for a given task
[C] //Proceedings of First International Conference on Knowledge Discovery & Data Mining . California , USA : AAAI Press , 1995 : 252 -257 .
[本文引用: 1]
[25]
ROSENBLATT F The perceptron: A probabilistic model for information storage and organization in the brain
[J]. Psychological Review 1958 , 65 (6 ): 386 -408 .
DOI:10.1037/h0042519
PMID:13602029
[本文引用: 1]
[26]
HOCHREITER S SCHMIDHUBER J Long short-term memory
[J]. Neural Computation 1997 , 9 (8 ): 1735 -1780 .
DOI:10.1162/neco.1997.9.8.1735
PMID:9377276
[本文引用: 1]
Learning to store information over extended time intervals by recurrent backpropagation takes a very long time, mostly because of insufficient, decaying error backflow. We briefly review Hochreiter's (1991) analysis of this problem, then address it by introducing a novel, efficient, gradient-based method called long short-term memory (LSTM). Truncating the gradient where this does not do harm, LSTM can learn to bridge minimal time lags in excess of 1000 discrete-time steps by enforcing constant error flow through constant error carousels within special units. Multiplicative gate units learn to open and close access to the constant error flow. LSTM is local in space and time; its computational complexity per time step and weight is O(1). Our experiments with artificial data involve local, distributed, real-valued, and noisy pattern representations. In comparisons with real-time recurrent learning, back propagation through time, recurrent cascade correlation, Elman nets, and neural sequence chunking, LSTM leads to many more successful runs, and learns much faster. LSTM also solves complex, artificial long-time-lag tasks that have never been solved by previous recurrent network algorithms.
[27]
CHO K VAN M B GULCEHRE C et al Learning phrase representations using RNN encoder-decoder for statistical machine translation
[C]//Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing . Maryland, USA:ACL , 2014 : 1724 -1734 .
[本文引用: 1]
[28]
徐中华 . 上海地区支护结构与主体地下结构相结合的深基坑变形性状研究 [D]. 上海 : 上海交通大学 , 2007 .
[本文引用: 2]
XU Zhonghua Deformation behavior of deep excavations supported by permanent structure in Shanghai soft deposit [D]. Shanghai : Shanghai Jiao Tong University , 2007 .
[本文引用: 2]
上海地区深基坑工程中地下连续墙的变形性状
1
2008
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Deformation behavior of diaphragm walls in deep excavations in Shanghai
1
2008
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
深基坑地连墙支护体系协调变形规律试验研究
1
2020
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Experimental study on compatible deformation of diaphragm wall support system for deep foundation pit
1
2020
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Sliding stability and lateral displacement analysis of reinforced soil retaining walls
1
2019
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
地铁基坑开挖数值模拟及变形特征研究
1
2020
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Research on numerical simulation and deformation characteristics of subway foundation excavation
1
2020
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Displacement-controlled approach for the analysis of embedded cantilever retaining walls with a distanced strip surcharge
1
2022
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
南沙港区软土狭长深基坑围护体系性状
1
2022
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Behavior of retaining system of narrow-long deep foundation pit in soft in Nansha Port Area
1
2022
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
深厚淤泥地层深基坑变形影响因素分析
1
2021
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Influencing factors for deformation of deep foundation pits in thick mud stratum
1
2021
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
内撑式地连墙变形特征及其参数优化研究
1
2021
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Research on deformation characteristics and parameter optimization of diaphragm wall with interior bracing structure
1
2021
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
福州软土地区地铁车站基坑墙体变形特性分析
1
2018
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
The diaphragm walls of deformation properties of excavation for metro stations in Fuzhou soft soil deposits
1
2018
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
深大基坑中冠梁的变形特征及一种新型冠梁
1
2023
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Deformation characteristics of conventional and new top beams in deep and large foundation pit with numerical simulations
1
2023
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
软土基坑开挖引起地下连续墙水平变形的能量法
1
2021
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Energy method for horizontal deformation of diaphragm wall due to soft soil foundation pit excavation
1
2021
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
基于斜桩支护的框架结构基坑变形分析
1
2022
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Deformation analysis of frame structure foundation pit based on inclined pile support
1
2022
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
深基坑开挖对邻近既有建筑变形影响研究
1
2022
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Influence of deep excavation induced deformation on the adjacent buildings
1
2022
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
兰州地铁雁园路站基坑支护监测与数值模拟分析
1
2021
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Monitoring and numerical simulation of support for foundation pit at Yanyuan Road Station of Lanzhou Metro
1
2021
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
强风化软硬互层岩质高边坡监测与数值模拟
1
2018
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Monitoring and numerical simulation of an interbedding high slope composed of soft and hard strong-weathered rock
1
2018
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
深基坑桩锚支护结构位移分析及数值模拟
1
2022
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Displacement analysis and numerical simulation of pile-anchor retaining structure in deep foundation pit
1
2022
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
复杂条件下深基坑多层支护方法及数值模拟研究
1
2018
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Multi-larger supporting method and numerical simulation for deep foundation pit under complex condition
1
2018
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
基坑倾斜桩支护的变形数值分析
1
2019
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Numerical analyses of deformation of inclined pile-retained excavations
1
2019
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
基于改进KNN与基坑参数对地连墙变形预测研究
1
2021
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
Research on deformation prediction of diaphragm wall based on improved KNN and parameters of subway deep excavation
1
2021
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
A neural network approach to estimating deflection of diaphragm walls caused by excavation in clays
1
2007
... 基坑开挖过程中支护结构及周围环境的变形问题受到许多学者关注.文献[1 ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ -9 ]中通过对土层分布、施工方法、支护方案、开挖深度等实测和模拟数据的分析,发现支护结构的最大侧移与开挖深度的关系可以由地质条件、施工方法、支护方案等条件来确定,根据不同施工条件确定的支护结构最大侧移一般为开挖深度的0.1%~0.87%.文献[10 -11 ]中通过分析基坑开挖时桩锚支护结构的实测数据与数值模拟结果,归纳冠梁和支护桩的变形分布规律,并利用最小势能原理,推导出支护桩桩顶最大水平位移的计算公式.文献[12 ⇓ ⇓ ⇓ ⇓ ⇓ -18 ]中通过数值模型模拟了不同的施工状态、地质条件和支护方式,动态分析了基坑开挖不同阶段支护结构、周围环境和结构的变形,为支护结构的设计选型、设计优化和施工提供了参考数据.随着机器学习技术的快速发展与普及,部分学者开始将机器学习应用于岩土工程领域.张雯超等[19 ] 基于70多个苏州地铁深基坑设计及监测数据,分析施工工法、地连墙厚度等8个输入参数与地连墙变形的相关性.Kung等[20 ] 通过对12个历史基坑开挖工程进行数值模拟,并通过人工神经网络(ANN)对基坑开挖过程中各个工况下地下连续墙的水平位移进行预测,通过对比数值模拟与ANN预测结果说明ANN算法可以准确预测软土地区基坑开挖过程中地下连续墙的变形情况. ...
1
1995
... 支持向量机(SVM)由Vapnik等[21 ⇓ ⇓ -24 ] 在20世纪90年代提出.在早期,这种方法被用于统计学习领域,可以通过对小样本数据的学习,来探究样本数据之间的规律. ...
A training algorithm for optional margin classifiers
1
1992
... 支持向量机(SVM)由Vapnik等[21 ⇓ ⇓ -24 ] 在20世纪90年代提出.在早期,这种方法被用于统计学习领域,可以通过对小样本数据的学习,来探究样本数据之间的规律. ...
Support-vector networks
1
1995
... 支持向量机(SVM)由Vapnik等[21 ⇓ ⇓ -24 ] 在20世纪90年代提出.在早期,这种方法被用于统计学习领域,可以通过对小样本数据的学习,来探究样本数据之间的规律. ...
Extracting support data for a given task
1
1995
... 支持向量机(SVM)由Vapnik等[21 ⇓ ⇓ -24 ] 在20世纪90年代提出.在早期,这种方法被用于统计学习领域,可以通过对小样本数据的学习,来探究样本数据之间的规律. ...
The perceptron: A probabilistic model for information storage and organization in the brain
1
1958
... 多层感知器(MLP)模型是一种基本的ANN模型.最早由Rosenblatt[25 ] 在20世纪60年代提出.MLP模仿人脑在处理问题时的工作机制,大脑由多个神经元连接在一起,当一个神经元接收到来自其他神经元的信号时,它会产生刺激,将信号经过处理后传输给其他神经元,神经元重复地传输信号,并且不断调整反馈输入和输出信号之间的关系. ...
Long short-term memory
1
1997
... LSTM最早由Hochreiter和Schmidhuber[26 ] 在1997年提出.LSTM模型是一种考虑时序性输入参数的人工神经网络模型,与MLP相比,该模型考虑了不同时序输出量之间的影响,在预测时序性数据时更准确.与传统的循环神经网络(RNN)模型相比,LSTM引入了门控单元,解决了传统RNN模型在输入数据过大时梯度可能消失的问题. ...
Learning phrase representations using RNN encoder-decoder for statistical machine translation
1
2014
... GRU模型是LSTM的简化模型,由Cho等[27 ] 于2014年首次提出.与LSTM模型相比,GRU模型结构更简单,结构参数更少,因此在同等条件下,GRU模型计算量更小,训练时间更短. ...
2
2007
... 支护结构最大水平位移预测模型的研究资料取自徐中华[28 ] 根据岩土工程领域已出版的专著、各类期刊和论文编制的上海地区基坑工程变形实测案例数据库,数据集包括上海地区的89个基坑工程的实测数据.该数据集包括水文地质参数、施工参数、基坑设计参数和测量的最大水平位移.在本节中,通过SVM和MLP模型来预测支护结构的最大侧移.随机选取总数据集70%的数据(即62个)作为模型的训练集,剩余30%的数据(即27个)作为模型的测试集.根据国内外对基坑支护结构变形影响因素的研究和数据库涉及实际工程的情况,主要关注基坑设计参数对支护结构侧移的影响,选取基坑开挖深度x 1 、地下连续墙厚度x 2 、支护结构长度x 3 、支护结构单位长度抗弯刚度x 4 、内支撑数量x 5 、首道内支撑距离地面深度x 6 、内支撑平均间隔x 7 、支护类型x 8 这8个主要因素作为模型的输入量,支护结构最大侧移y 为输出量.x 8 =1时对应支护结构与地下主体结构相结合的支护方式;x 8 =2时对应顺作法的地下连续墙支护方式. ...
... 基于2.2节中的最优参数值,分别采用SVM和MLP模型对不同基坑支护结构的最大侧移进行预测.训练数据来自文献[28 ]中随机选择的62组数据,经过训练和交叉验证,得到上述两个模型对应的预测模型,并对样本数据剩余的27组数据进行预测,图8 为各模型最优参数组合下测试集回归效果对比图. ...
2
2007
... 支护结构最大水平位移预测模型的研究资料取自徐中华[28 ] 根据岩土工程领域已出版的专著、各类期刊和论文编制的上海地区基坑工程变形实测案例数据库,数据集包括上海地区的89个基坑工程的实测数据.该数据集包括水文地质参数、施工参数、基坑设计参数和测量的最大水平位移.在本节中,通过SVM和MLP模型来预测支护结构的最大侧移.随机选取总数据集70%的数据(即62个)作为模型的训练集,剩余30%的数据(即27个)作为模型的测试集.根据国内外对基坑支护结构变形影响因素的研究和数据库涉及实际工程的情况,主要关注基坑设计参数对支护结构侧移的影响,选取基坑开挖深度x 1 、地下连续墙厚度x 2 、支护结构长度x 3 、支护结构单位长度抗弯刚度x 4 、内支撑数量x 5 、首道内支撑距离地面深度x 6 、内支撑平均间隔x 7 、支护类型x 8 这8个主要因素作为模型的输入量,支护结构最大侧移y 为输出量.x 8 =1时对应支护结构与地下主体结构相结合的支护方式;x 8 =2时对应顺作法的地下连续墙支护方式. ...
... 基于2.2节中的最优参数值,分别采用SVM和MLP模型对不同基坑支护结构的最大侧移进行预测.训练数据来自文献[28 ]中随机选择的62组数据,经过训练和交叉验证,得到上述两个模型对应的预测模型,并对样本数据剩余的27组数据进行预测,图8 为各模型最优参数组合下测试集回归效果对比图. ...








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}