基于语义似然与高精度地图匹配的智能车辆同时定位与检测
赖国良1,2, 胡钊政1,2( ), 周哲2,3, 万金杰1,2, 任靖渊1,2
), 周哲2,3, 万金杰1,2, 任靖渊1,2
), 周哲2,3, 万金杰1,2, 任靖渊1,2
Simultaneous Detection and Localization for Intelligent Vehicles Based on HD Map Matching and Semantic Likelihood Model
LAI Guoliang1,2, HU Zhaozheng1,2(), ZHOU Zhe2,3, WAN Jinjie1,2, REN Jingyuan1,2
), ZHOU Zhe2,3, WAN Jinjie1,2, REN Jingyuan1,2
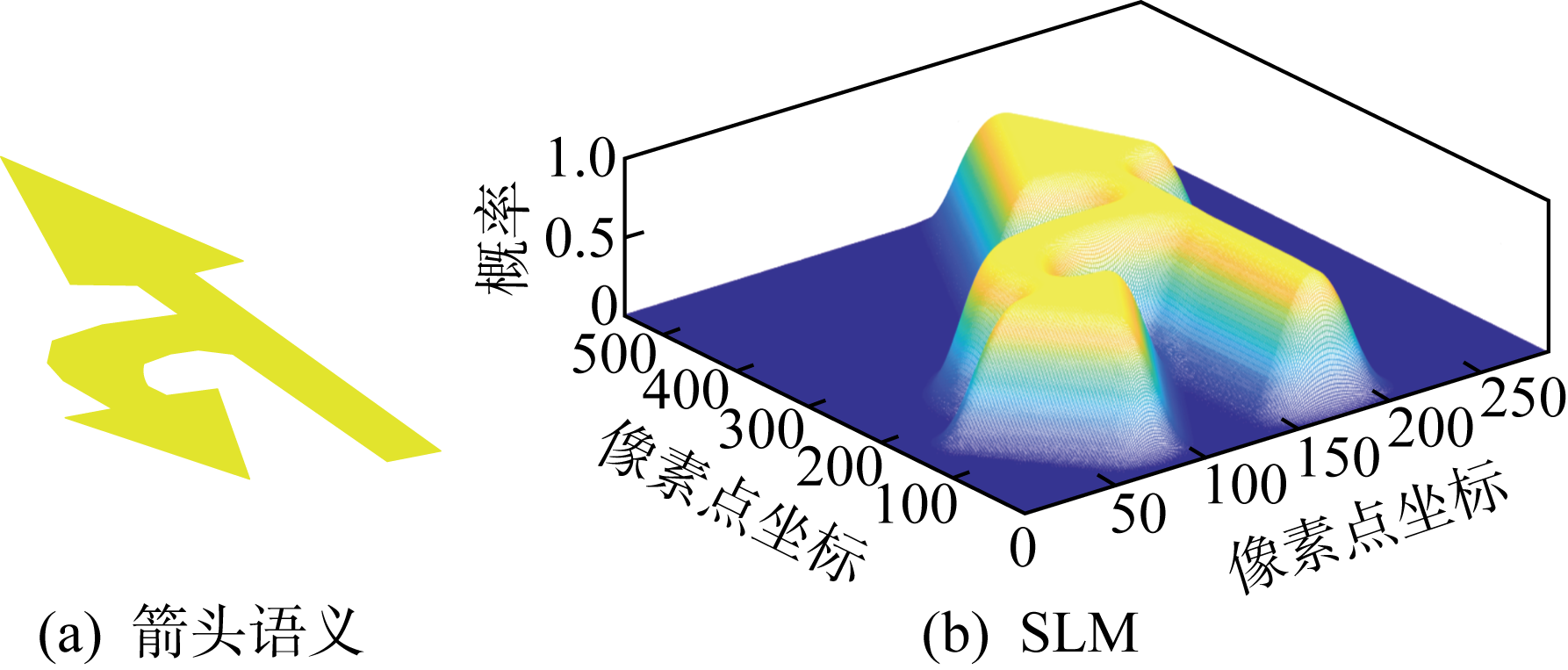
图4. 从语义目标获得SLM
Fig.4. SLM from semantic objects