

由于恶劣天气、碰撞、破损、人为疏忽等因素,沉船事故时有发生.沉没的船舶若未得到及时清理,可能会阻塞重要航道,威胁航运安全.船体损坏导致石油等有害物质的泄露,也会影响生态环境和生物生存[1].因此必须及时采取有效的打捞措施,处理沉船问题.
沉船打捞是一门实践性、综合性非常强的技术,包括地质勘测、探摸沉船破损情况及质量分布、吊索安装等步骤.根据沉船回收时的完整程度可将打捞方法分为整体起浮法和分段起浮法[2].整体起浮法可以保证沉船完整性,随着作业设备和技术的发展,整体起浮的打捞难度也在逐渐降低.一些具有重大民事意义或文化价值的船舶往往需要被整体打捞出来.打捞系统是由多个结构组成的复杂系统,打捞船与沉船之间通过提升缆连接,在环境因素的作用下相互影响.浮体之间的水动力干扰不仅会影响多体系统的稳定性,还会导致更加复杂的载荷与运动响应.
王伟平等[3]针对沉船打捞过程中抬浮驳船受波浪上下起伏影响而导致打捞载荷不稳定的现象,提出了一种配套使用的缓冲补偿系统,实现了打捞载荷的均衡.刘彦等[4]根据不同状态下驳船运动响应及所受波浪载荷,探讨了约束模式、浪向角及周期对驳船水动力影响规律,分析了浪向角与周期对驳船耦合水动力及运动响应的不利干扰.杨天笑[5]针对双驳抬撬沉船打捞的整个过程,研究了搁坐力、提升力、船体纵向最大剪力以及船体纵向最大弯矩在打捞过程中的变化规律.孟轲等[6]根据静水中沉船打捞的动态模拟,分析了不同沉船重量对吊缆张力的影响.杨芷蘅等[7]通过数值仿真探讨了不同沉没深度、不同提升速度等因素对海土吸附力大小的影响.Xin等[8]考虑水土相互作用和实时吃水变化,研究了离底阶段打捞系统可能出现的受力和运动突变.Lee等[9]通过试验测量了打捞过程所需提升力的大小,分析了海底摩擦力、水面张力、浮力等对提升力变化的影响.
打捞系统主体包括打捞驳船、沉船、系泊缆和提升缆等结构,不同环境载荷下整个打捞系统呈现出复杂的运动和动力特性.上述研究主要针对打捞系统部分阶段或结构,打捞系统全过程的动力学特性并未得到充分研究.本文着眼于打捞的全过程,分析不同阶段打捞系统的运动变化,研究风浪流载荷综合作用下打捞系统的运动和动力特性,分析不同提升速度对打捞系统的影响,对不同环境条件和打捞速度下提升缆和系泊缆的安全性进行分析,有助于识别和评估潜在的风险,指导设计和优化打捞方案,确定合适的作业窗口,预防事故发生,并满足合规性和法规要求.通过采取适当的安全管理和控制措施,可以提高打捞作业的安全性,保护人员和设备的安全,并减少可能的损失和风险.
1 打捞方案设计
1.1 打捞方案介绍
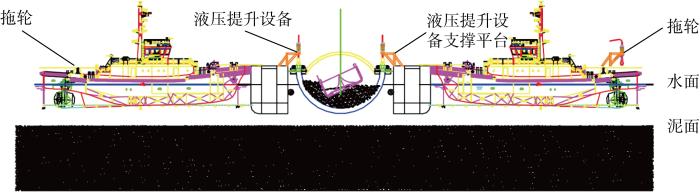
基于沉船遗址打捞的要求,利用专用浮箱整体抬浮法进行沉船整体打捞.弧形梁从沉船下方穿过海土,首尾两端用封板封住形成水下沉船遗址整体.在弧形梁上布置提升缆,最后采用整体抬浮法将水下沉船遗址整体提升至水面打捞上来.打捞驳船为带有月池的专用浮箱,布置在沉船正上方,驳船主甲板上布置液压提升装置,在弧形梁穿越过沉船下方后,甲板上的提升装置同步进行打捞作业.整体打捞示意图如图1所示.
图1
1.2 打捞系统主要参数
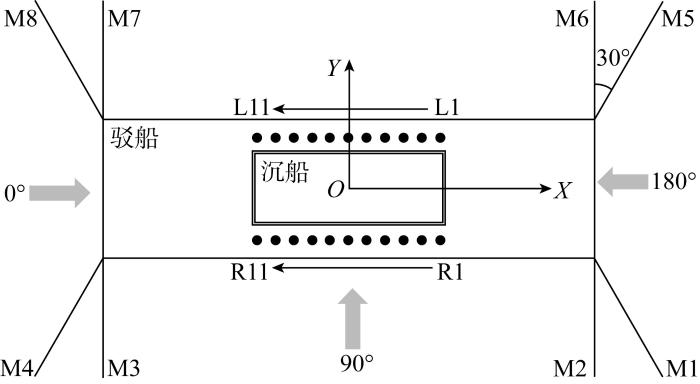
图2

表1 打捞系统主要参数
Tab.1
| 类型 | 参数 | 取值 |
|---|---|---|
| 打捞驳船 | 总长/m | 120.00 |
| 型宽/m | 34.00 | |
| 型深/m | 9.00 | |
| 排水量/t | 6 000.00 | |
| 沉船 | 总长/m | 46.00 |
| 型宽/m | 17.00 | |
| 型深/m | 8.50 | |
| 排水量/t | 9 500.00 | |
| 系泊缆 | 长度/m | 800.00 |
| 直径/mm | 120 | |
| 轴向刚度/GN | 1.46 | |
| 最小破断强度/kN | 9 720 | |
| 单位长度质量/(kg·m-1) | 273.95 | |
| 提升缆 | 长度/m | 107.00 |
| 直径/mm | 78 | |
| 轴向刚度/MN | 246 | |
| 最小破断强度/kN | 5 721 | |
| 单位长度质量/(kg·m-1) | 133.20 |
图3
2 数值模拟
2.1 三维势流理论
三维势流理论假定流体为无旋、无黏、不可压缩的理想流体,此时流场中存在的速度势Φ:
式中:
入射势直接由下式给出:
式中:$A$为入射波波幅;$g$为重力加速度;$d$为水深;$k$为波数;$α$为浪向角.
使用分布源汇的格林函数法求解绕射势和辐射势,从而得到流场的速度势.通过速度势计算出流场的速度分布.压强分布通过拉格朗日积分求解.流体对物体的作用力可沿着物体湿表面进行积分来计算.
2.2 时域运动方程
在整体打捞过程中,沉船不仅受到环境载荷的影响,还会受到提升缆和海床的作用,需要考虑所有外力载荷对沉船的作用.因此,沉船在外力载荷综合作用下的时域运动方程可表示为
式中:
式中:
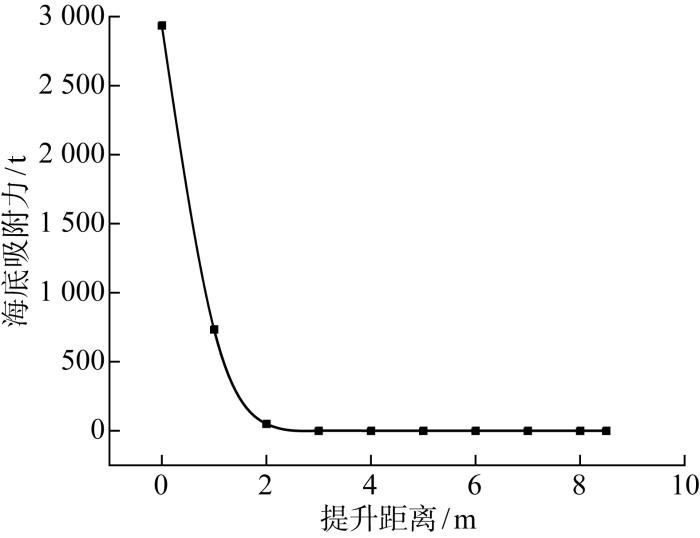
2.3 海土吸附力
在结构物提升过程中,由于结构物、土和液体(通常为水)之间的相互作用,会产生吸附力.吸附力通常是由土对结构物底面的黏附力、提升过程中产生的负孔隙水压力和结构物侧面产生的侧向摩擦阻力三部分组成.吸附力的计算需要考虑许多因素,如结构物的浸没深度和形状,土的类型和性质等.采用Skempton公式作为吸附力计算的理论公式[11]:
式中:
图4
2.4 有限元模型
根据上述理论建立沉船整体打捞有限元模型,由驳船和沉船多体水动力耦合动力响应计算模型组成.本文采用的空间坐标系为右手坐标系,坐标原点位于驳船重心所在垂线与水面的交点,X轴正方向从船尾到船艏延伸,Y轴正方向从右舷到左舷延伸,Z轴正方向从水面到甲板方向延伸,如图5所示.
图5
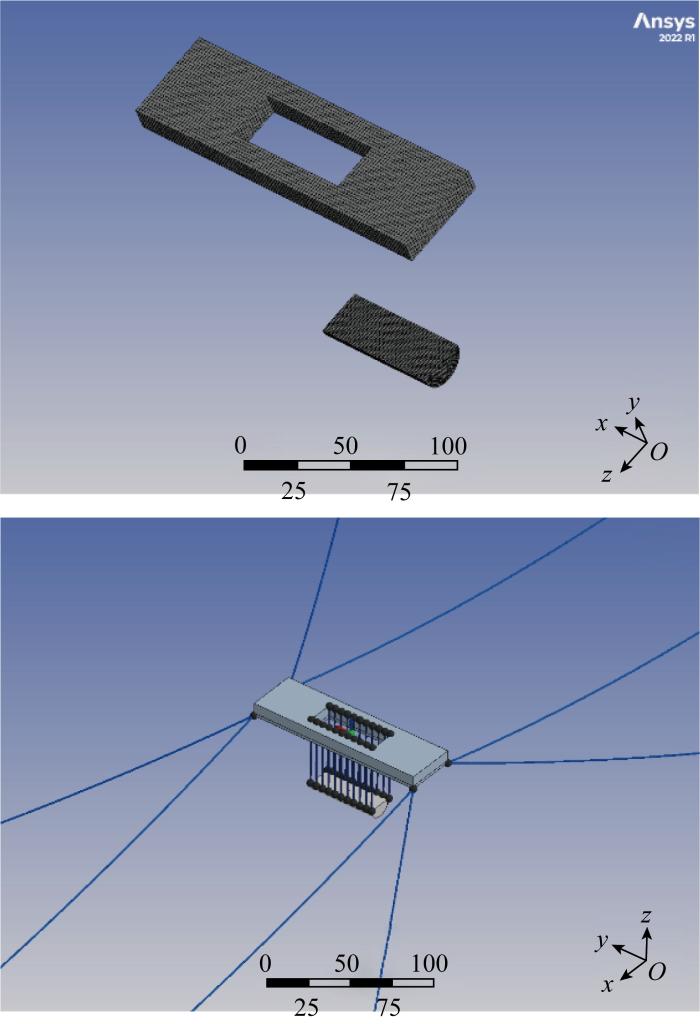
由于网格大小与计算频率相关,在打捞系统模型简化的基础上,分别对沉船和打捞驳船定义1 m和2 m的网格尺寸,使用combined meshing方法划分网格,总网格数为 14 246.
2.5 计算工况及环境参数
为研究风浪流联合作用以及不同提升速度下打捞系统的响应变化,确定了18组不同的参数选择,本文计算所使用的环境条件如表2所示.波浪条件采用JONSWAP谱.
表2 不同工况参数设置
Tab.2
| 工况 | 波浪 | 风 | 流 | 提升速度/ (m·s-1) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 波高/m | 谱峰周期,T/s | 浪向角/(°) | 谱峰因子 | 风速/(m·s-1) | 流速/(m·s-1) | |||||||
| DP1 | 0.1 | 9 | 90 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP2 | 0.5 | 9 | 90 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP3 | 1 | 9 | 90 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP4 | 0.5 | 5 | 90 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP5 | 0.5 | 7 | 90 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP6 | 0.5 | 11 | 90 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP7 | 0.5 | 9 | 90 | 3.3 | 10.8 | 0.77 | 0.005 | |||||
| DP8 | 0.5 | 9 | 90 | 3.3 | 10.8 | 0.77 | 0.05 | |||||
| DP9 | 0.5 | 9 | 90 | 3.3 | 10.8 | 0.77 | 0.1 | |||||
| DP10 | 0.5 | 9 | 0 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP11 | 0.5 | 9 | 10 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP12 | 0.5 | 9 | 20 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP13 | 0.5 | 9 | 30 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP14 | 0.5 | 9 | 40 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP15 | 0.5 | 9 | 50 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP16 | 0.5 | 9 | 60 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP17 | 0.5 | 9 | 70 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
| DP18 | 0.5 | 9 | 80 | 3.3 | 10.8 | 0.77 | 0.01 | |||||
3 结果分析与讨论
3.1 水动力性能分析
图6
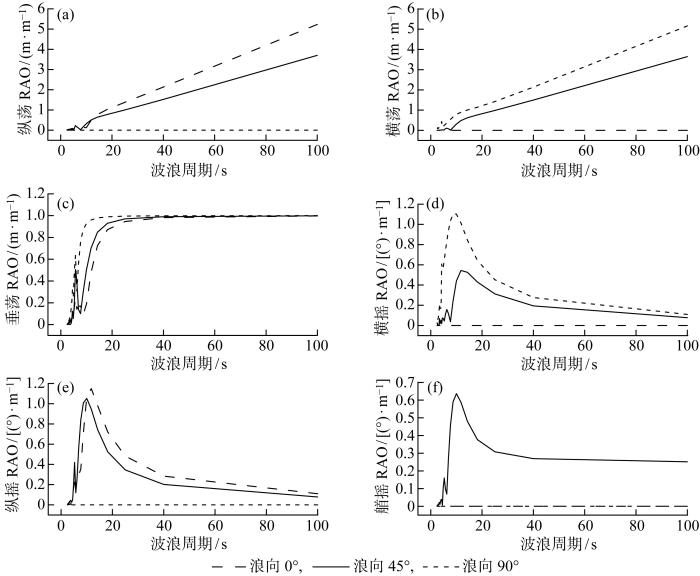
图7
对于驳船(见图6):纵荡和横荡RAO随波浪周期的增大总体呈上升趋势,受浪向角的影响较大.浪向角逐渐增大时,纵荡方向的运动幅度减小,在0° 浪向时运动响应幅值最大;横荡RAO随浪向角增大运动响应幅值增加,横浪时运动响应最大.当波浪周期较小时,垂荡RAO随着波浪周期增大而增大,随后趋于定值.横摇、纵摇、艏摇RAO随波浪周期变化均表现出先增大后减小的趋势,横摇RAO在横浪时最大,艏摇RAO在斜浪时最大.
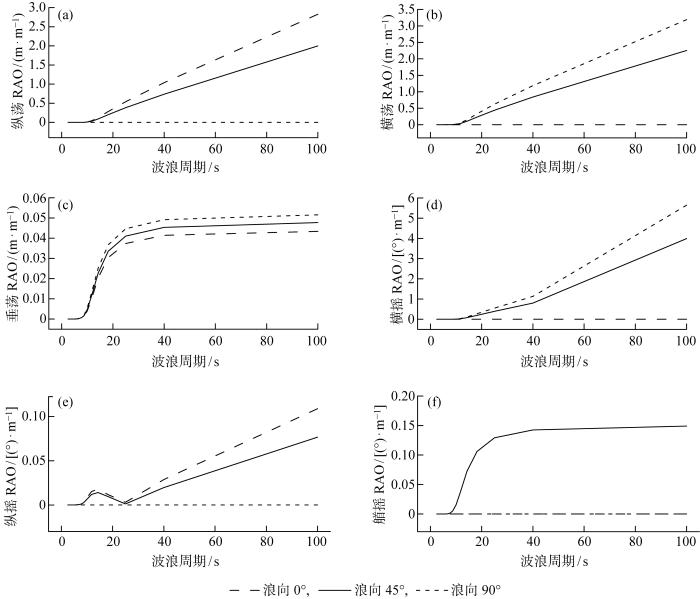
对于沉船(见图7):纵荡、横荡、横摇RAO均随波浪周期增大而增加,0°浪向时纵荡RAO最大,横荡和横摇RAO均在横浪时达到最大值.波浪周期增加,垂荡和艏摇RAO先增大后趋于稳定,垂荡RAO随浪向角变化差异不大,艏摇RAO在斜浪时达到最大值.
3.2 不同阶段打捞系统响应分析
3.2.1 离底阶段
离底阶段由于海土吸附力的存在,运动响应较为复杂.打捞系统的运动响应时程曲线如图8所示.随着打捞作业的进行,沉船匀速上升,驳船垂荡方向可以看见明显的吃水增加.当沉船即将脱离海底时,驳船吃水减小.在整个离底阶段,沉船和驳船在纵荡、纵摇、艏摇方向的运动响应幅值很小,主要表现在横荡和横摇方向.沉船横荡方向运动的极大值为0.14 m,横摇方向极大值为0.38°.驳船横荡方向运动的极大值为0.49 m,横摇方向极大值为0.35°.
图8
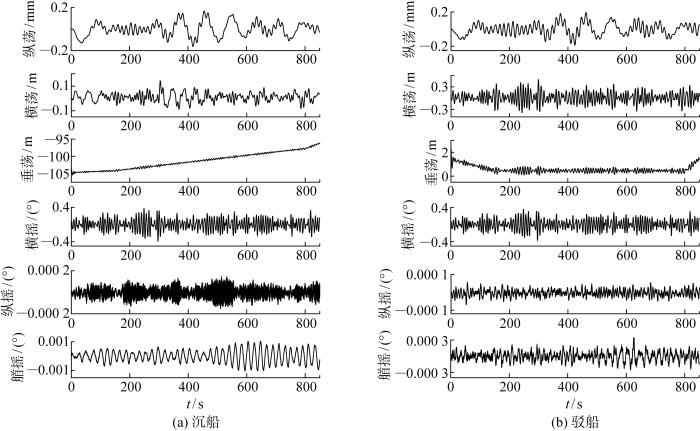
图8
离底阶段打捞系统运动响应时程曲线
Fig.8
Time history of motion response of salvage system in off-bottom stage
图9
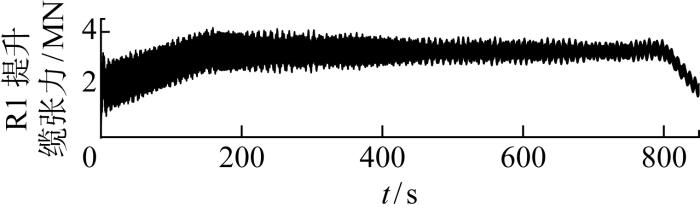
图9
离底阶段提升缆R1的张力时程曲线
Fig.9
Time history of tension of lifting cable R1 in off-bottom stage
图10

图10
离底阶段系泊缆M1、M2的张力时程曲线
Fig.10
Time history of tension of mooring cable M1 and M2 in off-bottom stage
3.2.2 水下提升阶段
匀速打捞作业时,水下提升阶段是一个稳定平衡的过程.图11展示了水下提升阶段打捞系统的运动响应,纵荡、纵摇和艏摇方向运动幅度较小,主要体现在横荡、垂荡、横摇运动上.随着提升缆的收缩,沉船与驳船距离变化,浮体之间出现耦合效应,沉船与驳船的横荡运动幅度均有所增加.沉船横荡方向运动的极大值为0.35 m,横摇方向极大值为0.46°.驳船横荡方向运动的极大值为0.86 m,横摇方向极大值为0.42°.
图11
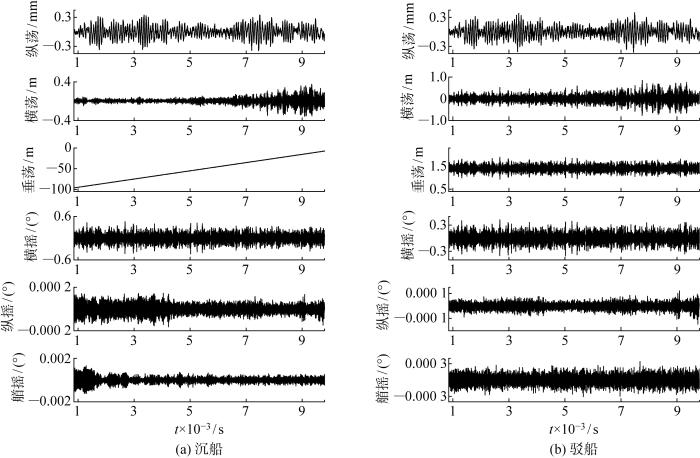
图11
水下提升阶段打捞系统运动响应时程曲线
Fig.11
Time history of motion response of salvage system in underwater lifting stage
图12
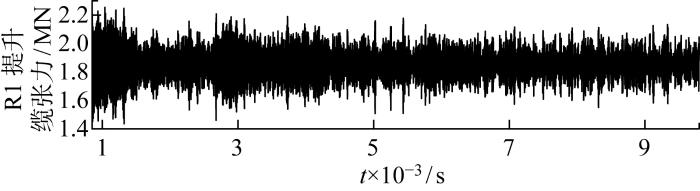
图12
水下提升阶段提升缆R1的张力时程曲线
Fig.12
Time history of tension of lifting cable R1 in underwater lifting stage
图13
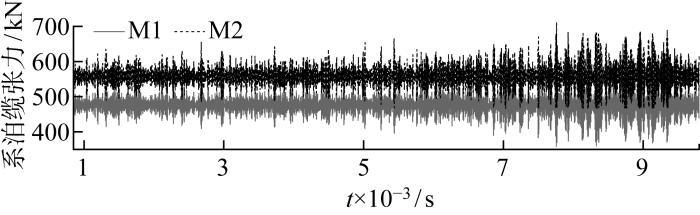
图13
水下提升阶段系泊缆M1、M2的张力时程曲线
Fig.13
Time history of tension of mooring cable M1 and M2 in underwater lifting stage
3.2.3 部分出水阶段
图14
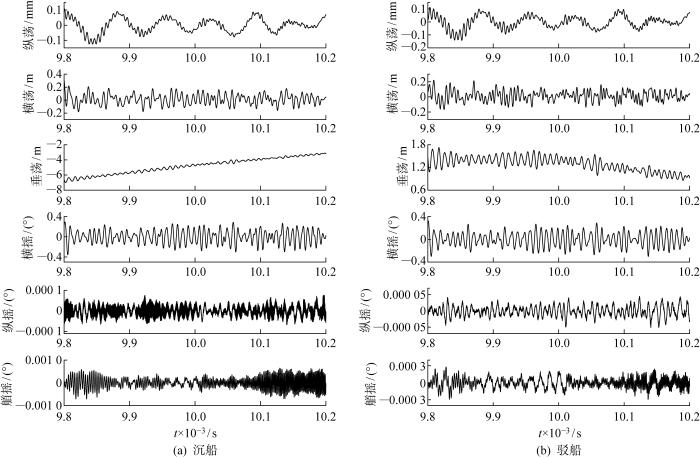
图14
部分出水阶段打捞系统运动响应时程曲线
Fig.14
Time history of motion response of salvage system in partial effluent stage
图15
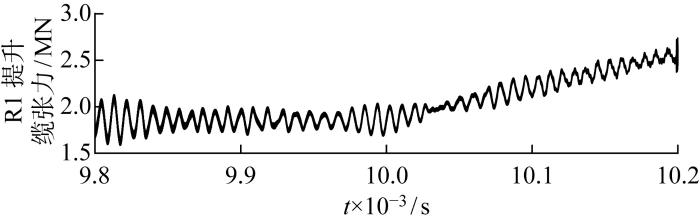
图15
部分出水阶段提升缆R1的张力时程曲线
Fig.15
Time history of tension of lifting cable R1 in partial effluent stage
图16
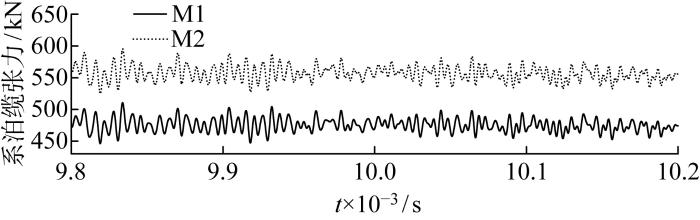
图16
部分出水阶段系泊缆M1、M2的张力时程曲线
Fig.16
Time history of tension of mooring cable M1 and M2 in partial effluent stage
图17

3.3 环境条件对打捞系统的影响
根据环境参数设置模拟获得不同环境条件下打捞系统的响应变化情况,默认打捞提升速度为0.01 m/s,运动时间为 10 200 s,时间步长设置为0.01 s.统计出不同波浪参数组合情况下打捞系统运动的最大位移以及缆绳的张力极值,分析环境条件对打捞作业的影响.
进行打捞作业时,由于沉船重量相对较大,驳船吃水增加明显,所以驳船Z方向的最大位移在未开始打捞的时候.沉船受到提升力作用不断升高,重心Z方向变化明显,因此本节所讨论的运动响应主要针对打捞系统沿X、Y方向的平动以及绕X、Y、Z方向的转动进行分析.
3.3.1 浪向角的影响
浪向角变化对驳船和沉船运动响应表现出相似的影响.以驳船为例:对比DP2、DP10~DP18下打捞系统的运动响应,如图18所示,横荡和横摇运动极值随浪向角增大而增加, 90° 浪向作用下,结构受到较大的侧向力,促使结构物发生横向运动,此时达到最大值.艏摇运动在0° 和90° 浪向作用时最小,在斜浪情况下取得最大值.纵荡、纵摇运动随着浪向角的增加呈现出上升后下降的趋势,在90° 浪向时最小.
图18
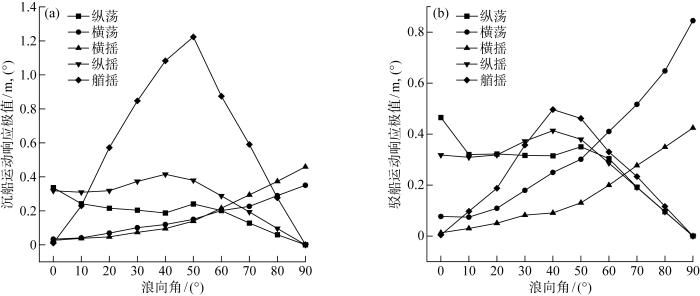
图18
不同浪向角下打捞系统运动响应幅值
Fig.18
Max motion response of salvage system in different wave directions
不同浪向角下打捞系统缆绳张力极值变化如图19所示.浪向角的变化对提升缆张力的影响较大,如图19(a)所示,模型关于X、Y轴对称,以R1~R6为例.20°~70°浪向作用下,靠近两端的提升缆的张力明显增加,从R1~R11(或L1~L11)呈现出先减小后增大的趋势,对称分布,0°~10°以及80°~90°浪向情况下各提升缆张力极值差别不大.图19(b)以R1~R3提升缆为例说明了同一提升缆在不同浪向下的张力极值变化,对于R1~R2(或R10~R11、L1~L2、L10~L11)提升缆,在50° 浪向作用下张力极值最大,对R3~R9(或L3~L9)提升缆,浪向变化对提升缆张力极值影响不大.随着浪向角的增大,系泊缆随浪向变化显著增加,系泊缆M1~M4的张力极值总体上大于M5~M8.
图19
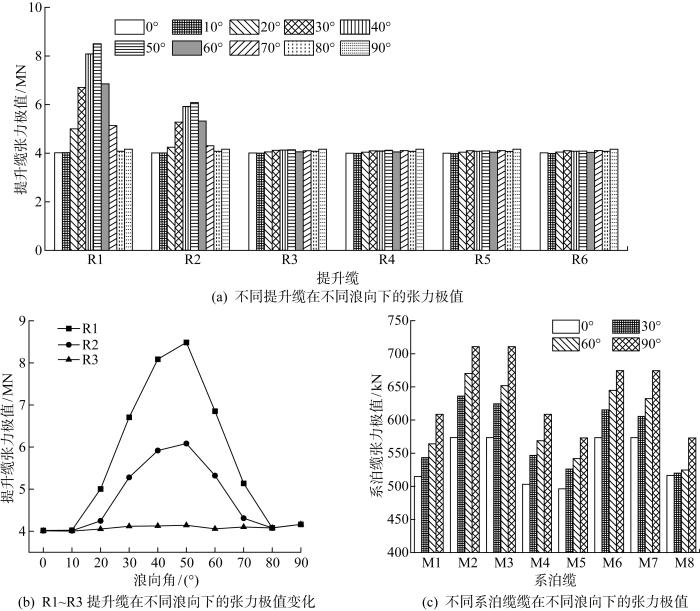
图19
不同浪向角下打捞系统缆绳张力极值变化
Fig.19
Max cable tension of salvage system in different wave directions
3.3.2 波高的影响
图20
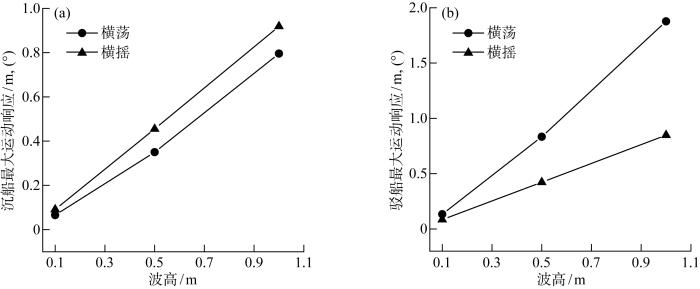
图20
不同波高下打捞系统运动响应幅值
Fig.20
Max motion response of salvage system at different wave heights
图21
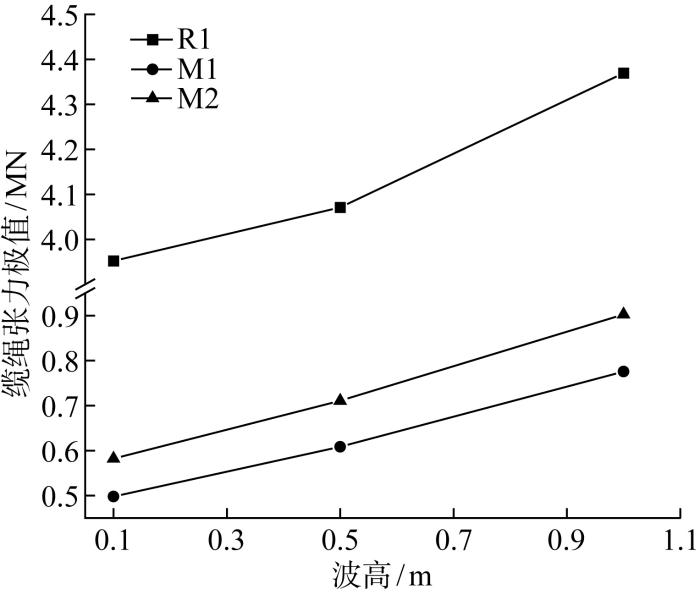
图21
不同波高下打捞系统缆绳张力极值
Fig.21
Max cable tension of salvage system at different wave heights
3.3.3 谱峰周期的影响
图22
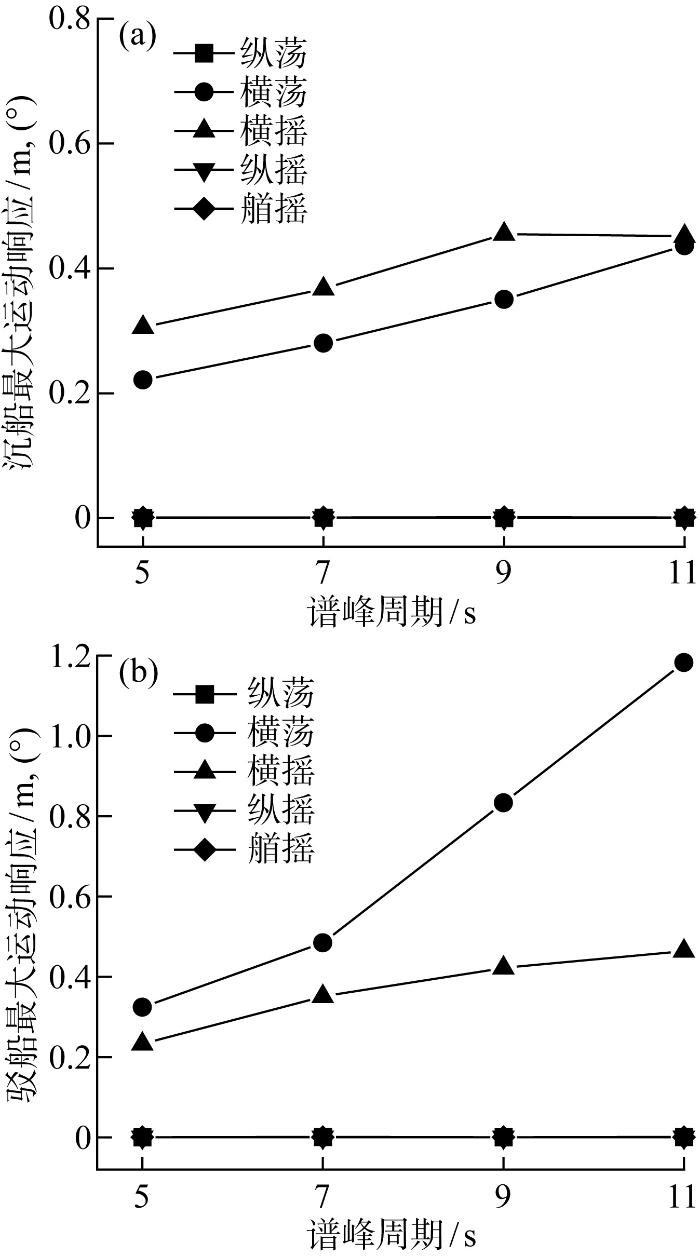
图22
不同谱峰周期下打捞系统运动响应幅值
Fig.22
Max motion response of salvage system in different wave periods
图23
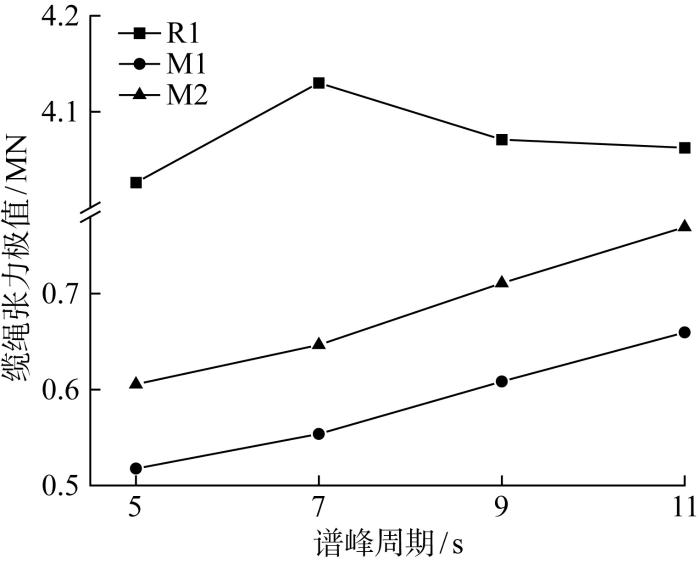
图23
不同谱峰周期下打捞系统缆绳张力极值
Fig.23
Max cable tension of salvage system in different wave periods
谱峰周期的改变对提升缆及系泊缆的影响存在差异.提升缆张力极值随谱峰周期变化呈现出先增大后减小的趋势,最大出现在T=7 s;对系泊缆,张力极值最大出现在T=11 s,随着波浪周期的增加,张力极值变大.
3.4 提升速度对打捞系统的影响
图24
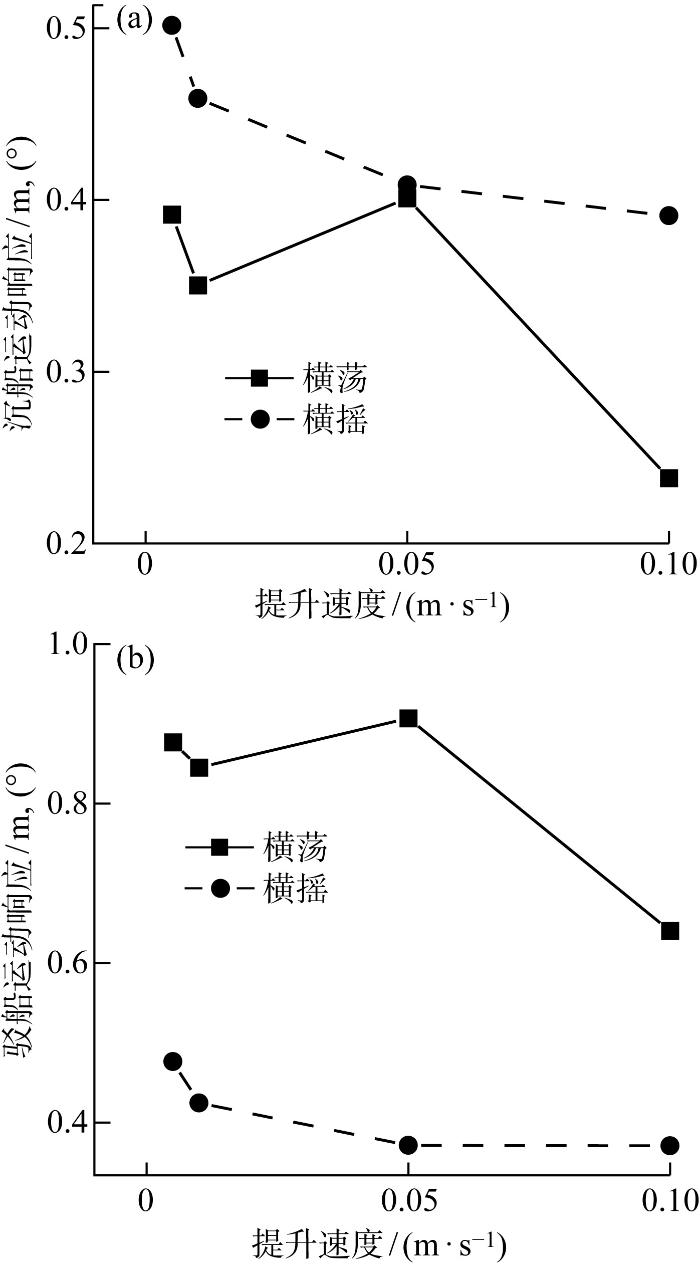
图24
不同提升速度下打捞系统运动响应幅值
Fig.24
Max motion response of salvage system at different lifting speeds
图25
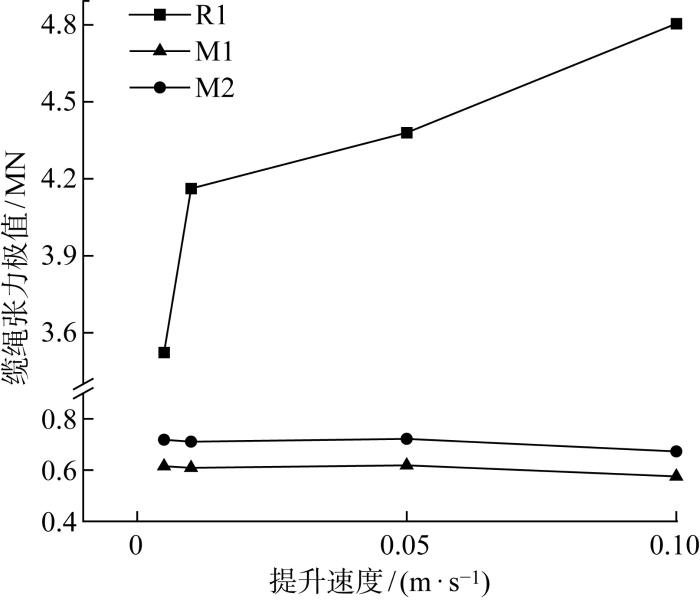
图25
不同提升速度下打捞系统缆绳张力极值
Fig.25
Max cable tension of salvage system at different lifting speeds
对比DP4、DP9~DP11工况下打捞系统的运动变化曲线,驳船和沉船表现出相似的规律.随着提升速度增加,横荡和横摇运动极值总体上呈现出减小的趋势,但在0.05 m/s时,打捞系统横荡运动响应极值明显升高.
提升速度的增加导致提升缆受到更大的动态效应影响,张力极值显著增加, 10 mm/s与5 mm/s相比张力极值增加了18%,因此保持较低的提升速度可以明显降低提升缆的张力极值.由于打捞系统的运动响应极值总体上呈现出减小的趋势,所以系泊缆张力极值也有一定程度的降低.
4 安全性分析
根据上节分析,打捞系统的运动响应幅值均保持在一个较稳定的水平,因此本节主要针对提升缆和系泊缆的张力极值进行安全性分析.缆绳的安全系数是用于评估和判断缆绳强度和安全性的重要指标.安全系数表示了缆绳在设计或使用中的安全程度.安全系数的数值越大,缆绳的安全性越高,工程和设计中要求使用具有足够安全系数的缆绳以确保在承受额定工作载荷时不发生破断或失效.安全系数ε的计算公式为
其中:σbs为破断强度;σws为工作强度.根据公式计算各工况下缆绳的安全系数,如表3所示.
表3 不同工况缆绳安全系数统计
Tab.2
| 工况 | 波高/m | 谱峰 周期T/s | 浪向角/ (°) | 提升速度/ (m·s-1) | 系泊缆张力 极值/kN | 系泊缆 安全系数 | 提升缆张力 极值/kN | 提升缆 安全系数 |
|---|---|---|---|---|---|---|---|---|
| DP1 | 0.1 | 9 | 90 | 0.01 | 582.10 | 16.70 | 3 957.65 | 1.45 |
| DP2 | 0.5 | 9 | 90 | 0.01 | 710.76 | 13.68 | 4 162.30 | 1.37 |
| DP3 | 1.0 | 9 | 90 | 0.01 | 902.90 | 10.77 | 4 371.29 | 1.31 |
| DP4 | 0.5 | 5 | 90 | 0.01 | 605.63 | 16.05 | 4 028.12 | 1.42 |
| DP5 | 0.5 | 7 | 90 | 0.01 | 646.57 | 15.03 | 4 133.80 | 1.38 |
| DP6 | 0.5 | 11 | 90 | 0.01 | 769.24 | 12.64 | 4 062.40 | 1.41 |
| DP7 | 0.5 | 9 | 90 | 0.005 | 718.19 | 13.53 | 3 523.41 | 1.62 |
| DP8 | 0.5 | 9 | 90 | 0.05 | 721.97 | 13.46 | 4 379.50 | 1.31 |
| DP9 | 0.5 | 9 | 90 | 0.1 | 672.52 | 14.45 | 4 825.92 | 1.19 |
| DP10 | 0.5 | 9 | 0 | 0.01 | 573.49 | 16.95 | 4 075.73 | 1.40 |
| DP11 | 0.5 | 9 | 10 | 0.01 | 586.45 | 16.57 | 4 039.18 | 1.42 |
| DP12 | 0.5 | 9 | 20 | 0.01 | 599.96 | 16.20 | 5 198.95 | 1.10 |
| DP13 | 0.5 | 9 | 30 | 0.01 | 636.16 | 15.28 | 6 961.31 | 0.82 |
| DP14 | 0.5 | 9 | 40 | 0.01 | 670.23 | 14.50 | 8 273.32 | 0.69 |
| DP15 | 0.5 | 9 | 50 | 0.01 | 674.32 | 14.41 | 9 143.16 | 0.63 |
| DP16 | 0.5 | 9 | 60 | 0.01 | 670.20 | 14.50 | 7 211.56 | 0.79 |
| DP17 | 0.5 | 9 | 70 | 0.01 | 670.79 | 14.49 | 5 256.72 | 1.09 |
| DP18 | 0.5 | 9 | 80 | 0.01 | 671.38 | 14.48 | 4 107.06 | 1.39 |
对比表中数据,系泊缆的安全系数均在10以上,即使在受到额外的冲击或负载时,系泊缆也能够承受很大的应力而不会发生破断或失效,可以很好地保证作业时系泊系统的安全性.提升缆的安全系数在不同工况下存在较大差别,在DP9、DP12~DP17工况下均小于1.2,提升缆的破断强度仅略高于所受的力,缺乏足够的安全余量,可能使缆绳在承受额定工作负荷时容易接近或超过其强度极限,增加了断裂或损坏的风险.因此在进行打捞方案制定时,要选择适当的提升速度,同时应避免在20°~70°浪向工作,或选择破断强度更高的缆绳,确保打捞作业的安全进行.
5 结论
本文采用数值模拟方式对沉船打捞过程的耦合动力响应特性进行研究,首先计算了打捞系统六自由度RAO,并设计了一系列计算工况,依次分析不同阶段、不同波浪条件以及不同提升速度下打捞系统响应的变化规律,可以得出以下结论:
(1) 整个打捞过程中,由于海土吸附力以及多体耦合效应,制定打捞方案的时候,需要特别关注离底和部分出水时打捞系统运动响应以及提升缆的张力变化.
(2) 驳船和沉船运动在不同波浪条件下的变化相似.随着波高和谱峰周期的增大,打捞系统运动幅值增加,浪向变化在打捞系统六自由度方向上有不同的体现,0°浪向时纵荡运动幅度较大,斜浪向时艏摇、纵摇、纵荡方向运动较为明显,而90°作用时横荡、横摇方向运动较为剧烈.
(3) 环境条件对缆绳张力影响较为复杂.斜浪作用时,两端提升缆张力极值显著增加.提升缆在谱峰周期T=7 s时取得最大值,实际作业过程中,应尽量避免该频率附近的波浪.系泊张力随浪向角、波高和谱峰周期增大呈上升趋势,同时受布置位置的影响,横浪状态下90°布置的系泊缆张力极值最大.
(4) 提升速度对打捞系统的影响主要体现在提升缆张力极值的变化上.随着提升速度增加,提升缆张力极值大幅提高,但提升速度的增加缓解了打捞系统横摇方向的运动.因此制定打捞方案时,应综合考虑各方面的响应极值,选择合适的打捞速度.
(5) 在整个打捞过程中,提升缆的张力极值均出现在离底阶段,当浪向选择不恰当时,两端的提升缆极易出现损坏.故在制定打捞方案时,要选择合适的来浪方向,可以将两端的提升缆替换为更高强度的钢缆,或考虑变速打捞,在较危险的离底阶段保持较低的提升速度.
最后,从模拟结果可以发现系泊缆的布置位置对缆绳受力存在较大影响,后续研究中将对不同的布置方案进行分析,探讨不同布置方案下缆绳受力以及打捞系统运动响应的变化.
参考文献
Chronic oiling of marine birds in California by natural petroleum seeps, shipwrecks, and other sources
[J].DOI:10.1016/j.marpolbul.2013.12.023 URL [本文引用: 1]
沉船打捞带缓冲补偿的液压同步提升系统研究
[J].
Study of hydraulic stnchronous lifting system for shipwreck salvage with cushion compensation
[J].
大吨位沉船打捞多体系统耦合水动力特性研究
[J].
Study of multi-body coupled hydrodynamic characteristics for large tonnage shipwreck salvage
[J].
沉船打捞作业时域内吊缆张力计算
[J].
Calculation of time-domain cable tension in salvage operation
[J].
沉船起吊过程中海土吸附力对吊力影响的数值分析
[J].
Numerical analysis of the influence of adsorption force in the lifting process of wrecked ship
[J].
Dynamic analysis of the mooring system of a salvage barge: A coupled time-domain method considering seabed resistance during the off-bottom stage
[J].DOI:10.1016/j.oceaneng.2023.114078 URL [本文引用: 1]
Lifting forces required to salvage a sunken vessel and caisson and their response to bottom friction, buoyancy release, surface tension, water capture and water release
[J].DOI:10.1016/j.oceaneng.2016.08.008 URL [本文引用: 1]
底质对潜坐结构吸附力的试验研究
[J].
Experimental research on breakout force of embedded objects from sediments
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}