

随着世界经济和船舶工业的不断发展,船舶数量和吨位高速增长,由于恶劣天气、碰撞或人为错误导致的沉船事故也持续增多,海损事故船舶大型化、深水化趋势明显[1].一些大吨位沉船由于没有被及时清除,在一些狭窄海域,沉船堵塞重要航道或设施,会对航运安全构成威胁.与此同时,这些沉船在海洋环境中会迅速恶化,在船体损坏或腐蚀后,石油和其他有害物质会进入海水,使附近地区面临极端污染风险.如今,沉船漏油已成为海鸟死亡的主要原因之一[2].沉船中的电气及电子设备释放的重金属会对海洋环境和人类健康造成有害影响.此外,一些沉船具有重要的考古、军事价值或政治敏感性.因此,有必要进行整体打捞作业,以保存贵重货物或消除对环境的污染.
现阶段常用的打捞方法主要包括浮力抬升法和机械抬升法.机械抬升法是一种众所周知且可靠的方法,其基本原理是利用一组提升缆,将沉船整体从海底吊升至水面.整个打捞过程可分为以下4个阶段[3]:①离底阶段,提升作业已经开始,但沉船仍与土壤接触;②水下提升阶段,物体离开海底泥土并在水中不断被提升;③部分打捞阶段,沉船开始露出水面;④完全打捞阶段,沉船浮出水面,并准备运送到其他地点.在波浪、海风、海流和其他环境因素的共同作用下,完成如此复杂的海上作业并不容易,一般来说,狭小的作业窗口会造成作业风险及成本迅速增加.因此,对打捞工程来说,全面了解多体打捞系统的运动响应至关重要,这将有助于预测作业窗口及控制作业过程.
目前沉船打捞研究相对较少,但针对其他系泊式多浮体系统开展的相关工作同样能够为打捞过程的数值预报带来一些启示.Ma等[4]采用边界元法和集中质量模型相结合的方法,对规则波浪作用下多体浮式平台的动态特性进行了数值预报.刘彦[5]基于势流理论增加人工阻尼黏性修正影响,利用AQWA (Advanced Quantitative Wave Analysis)软件对单驳船、双驳船约束及双船耦合进行水动力性能数值预报,重点分析了不同状态下驳船运动响应及波浪载荷,研究了驳船不同约束模式、浪向角及水深对驳船水动力影响规律.为解决双模块之间水动力相互干扰问题,Wang等[6]利用线性势流理论方法对两组结构形式不同的双模块开展了数值及试验研究,得到了多浮体之间水动力干扰的一般结论.总体而言,现有研究对多浮体相互作用有了较为系统的认识,有利于进一步探索打捞状态下由于多浮体耦合所引发的相互干扰现象.
在大吨位沉船整体打捞过程中,沉船离底阶段进行泥-水跨介质大吨位载荷转移时,吊缆受力的突变可能成为打捞工程中的较大危险因素,必须加以慎重对待.此外,打捞系统主体涉及浮吊船(或驳船)、沉船、系泊缆和提升缆,在沉船出水后,多浮体水动力干扰会使得整个打捞系统出现相当复杂的运动和动力特性.然而,现阶段系泊缆-驳船-提升缆-沉船耦合系统的动力学特性并没有得到充分研究,在大吨位沉船整体打捞方案实施之前有必要对其动态响应进行数值预测,确保打捞方案实施的可行性.本文以“长江口二号”沉船整体打捞作业为背景,设计相应的打捞方案,并对其关键状态的动力响应进行数值模拟,为大吨位沉船的整体打捞作业的顺利开展提供重要依据.
1 打捞方案设计
1.1 方案介绍
图1
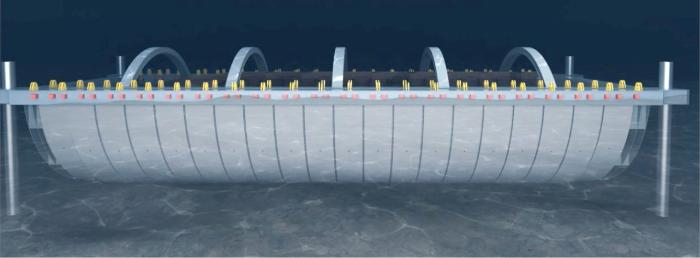
图1
所有弧形梁掘进安装完成示意(海底透视)
Fig.1
Schematic diagram of completion of excavation and installation of all arc-shaped beams (seabed perspective)
表1 几何参数
Tab.1
| 类型 | 参数 | 数值 | 类型 | 参数 | 数值 |
|---|---|---|---|---|---|
| 开口驳 | 总长/m | 130.0 | 水下沉船遗址 | 总长/m | 46 |
| 垂线间长/m | 13.0 | 型宽/m | 19 | ||
| 型宽/m | 34.0 | 型深/m | 9 | ||
| 型深/m | 9.0 | 质量/t | 8800 | ||
| 设计吃水/m | 6.0 | — | — | ||
| 空船质量/t | 6000 | — | — |
图2
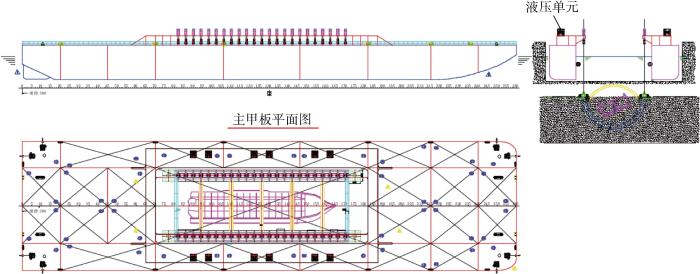
图2
开口驳整体提升示意图
Fig.2
Schematic diagram of lifting stage of integral wreck salvage operation
1.2 系泊系统
图3
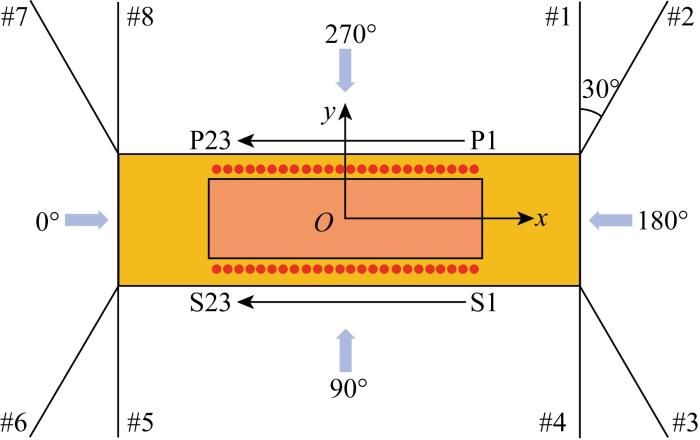
表2 系泊缆绳规格参数
Tab.2
| 直径/mm | 类别 | 单位长度质量/ (kg·m-1) | 轴向 刚度/MN | 破断 张力/kN |
|---|---|---|---|---|
| 56 | 钢丝绳 | 13.1 | 146 | 175 |
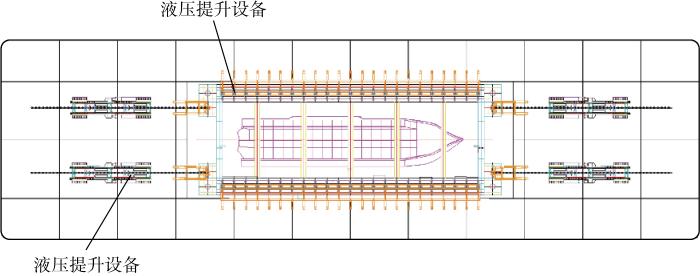
1.3 提升系统
表3 提升缆绳规格参数
Tab.3
| 直径/mm | 类别 | 单位长度质量/ (kg·m-1) | 轴向 刚度/MN | 破断 张力/MN |
|---|---|---|---|---|
| 78 | 钢丝绳 | 26 | 246 | 3.5 |
图4
2 数值仿真
2.1 三维势流理论
根据三维势流理论,假定流体为无旋、无黏、不可压缩的理想流体,此时流场的空间速度势函数满足:
式中:Re表示复数表达式的实数部分;ω为波浪圆频率;
将浮体在流场中的运动问题转化为定常问题的求解,ϕ(x, y, z)满足Laplace方程:
(1) 入射势通过下式直接给出:
式中:A为波幅;g为重力加速度;h为水深;k为波数;β为入射波与x轴正方向的夹角.
(2) 绕射势的控制方程和边界条件,对浮体a和浮体b,有:
式中:Sa和sb分别表示浮体a和浮体b的物体表面;n为浮体表面内法向量;H为水深.
(3) 若浮体a运动,浮体b静止,则a、b周围的辐射势分别为
式中:对于辐射势
其他情况下的控制方程和边界条件与之类似.
2.2 流体动力求解
求解出流场速度势之后,根据伯努利方程,可以得到作用在浮体上的动压力:
式中:ρ为流体密度.对浮体湿表面单元进行压力积分,即可得到作用于浮体上的流体作用力.
2.3 多浮体耦合运动的时域方程
已知作用在浮体上的波浪力,可以通过刚体运动理论求解浮体在波浪中的运动.在考虑风力、流力、波浪力、系泊力和提升力等环境载荷作用的情况下,多体耦合运动的时域方程[9]为
式中:
2.4 海底吸附力
海底吸附力指沉船与海底接触发生摩擦而产生的阻力、负孔隙水压力以及土颗粒之间的黏聚力.海底吸附力取决于海底特性、沉船下沉特性等.由于吸附力的存在,在沉船离底的过程中会对船底产生较大的向下拉力,增加整个起吊过程的难度和风险.本文所涉及的海底吸附力由Skempton公式[10]给出:
式中:
2.5 集中质量法
采用集中质量法对系泊系统进行全耦合数值模拟,其基本思想是将缆绳的质量集中到有限节点上,同时将缆绳所受载荷也集中到节点上,节点之间由无质量的弹簧相连[7].节点的控制方程可表示为
式中:m为节点质量矩阵;X为节点全局坐标向量;F为节点所受外力载荷,根据节点类型,外力载荷由重力、系泊张力、水动力载荷以及海底支持力的部分或全部组成.
2.6 有限元模型
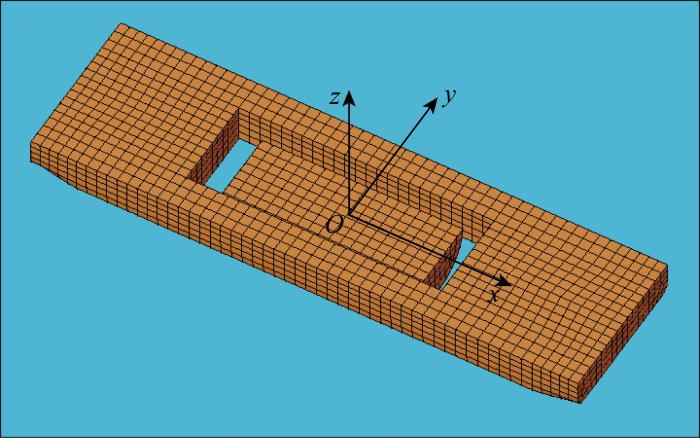
根据上述理论建立沉船整体打捞有限元模型,由驳船和沉船的水动力耦合模型以及多体耦合动力响应计算模型组成.坐标原点定义在驳船的船纵剖面与中纵剖面与水线面交点上,x轴指向船首为正,y轴指向左舷为正,z向上为正.基于三维建模软件完成沉船和驳船的三维模型,导入AQWA划分网格形成面元模型,如图5所示.
图5
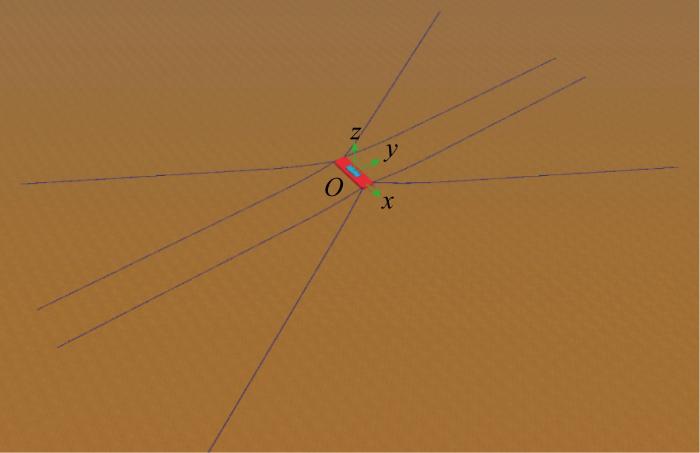
将AQWA的水动力计算结果导入Orcaflex软件中,计算水面船舶、提升缓冲系统以及沉船在风、浪、流等环境因素综合作用下的耦合运动响应特性和缆绳的受力情况,如图6所示.
图6
2.7 计算工况及环境参数
根据打捞过程中的受力变化,选择以下较为关键的两种状态进行模拟工作,计算并分析打捞系统的耦合动力响应.
(1) 沉船水下离底状态:沉船与海底分离的过程.通过液压提升设备,将沉船提升离底.在离底瞬间,沉船会受到海底吸附力的作用,包括海底底质与船体间的黏着力、沉船被提升过程中因水分来不及进入而产生的负孔隙水压力、底质与船体侧面所产生的侧摩擦阻力等[11].
(2) 沉船部分出水状态:沉船与海底分离后被提升至水面后的阶段.沉船部分出水后,由于多个浮体之间距离较近,浮体之间会出现耦合效应,浮体之间的相互影响会使整个多浮体打捞系统出现相当复杂的运动和动力特性.
不同工况所使用的环境条件如表4所示.
表4 海况参数
Tab.4
| 工况 编号 | 方向/ (°) | 波浪参数 | 风速/ (m·s-1) | 流速/ (m·s-1) | |||
|---|---|---|---|---|---|---|---|
| 波高,Hs/m | 谱峰周期,Tp/s | ||||||
| A1 | 0 | 0.5 | 5 | 10.8 | 2 | ||
| A2 | 45 | 0.5 | 5 | 10.8 | 2 | ||
| A3 | 90 | 0.5 | 5 | 10.8 | 2 | ||
| A4 | 135 | 0.5 | 5 | 10.8 | 2 | ||
| A5 | 180 | 0.5 | 5 | 10.8 | 2 | ||
| A6 | 0 | 0.5 | 7 | 10.8 | 2 | ||
| A7 | 45 | 0.5 | 7 | 10.8 | 2 | ||
| A8 | 90 | 0.5 | 7 | 10.8 | 2 | ||
| A9 | 135 | 0.5 | 7 | 10.8 | 2 | ||
| A10 | 180 | 0.5 | 7 | 10.8 | 2 | ||
3 结果分析与讨论
3.1 水动力特性
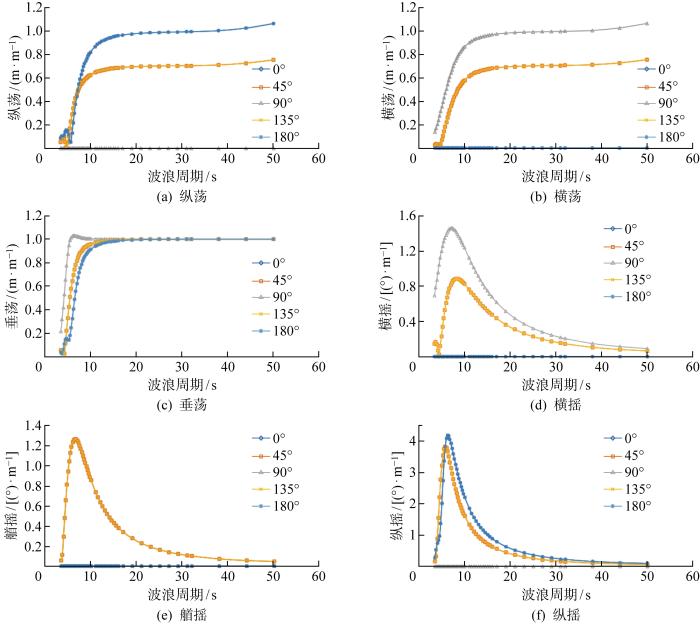
在利用专用浮箱整体抬浮法进行沉船打捞出水后,由于多个浮体之间距离较近,浮体之间会出现耦合效应,浮体之间的相互影响会使整个多浮体打捞系统出现相当复杂的运动和动力特性.针对沉船与驳船多浮体水动力干扰展开数值研究,利用幅值响应算子(RAO)表征浮体在波浪作用下的动态特征.由于计算模型相对于y轴对称分布,频域分析中浪向工况的选择为0°~180°,间隔45°.图7~8分别给出了驳船及沉船的六自由度运动响应RAO曲线,两者展示出较为相似的特性,其纵荡(surge)、横荡(sway)、垂荡(heave)运动RAO在低频段随着波浪周期的增加而增加,而横摇(roll)、纵摇(pitch)、艏摇(yaw)运动RAO波浪周期的增加呈现出先增大后减小的趋势.
图7
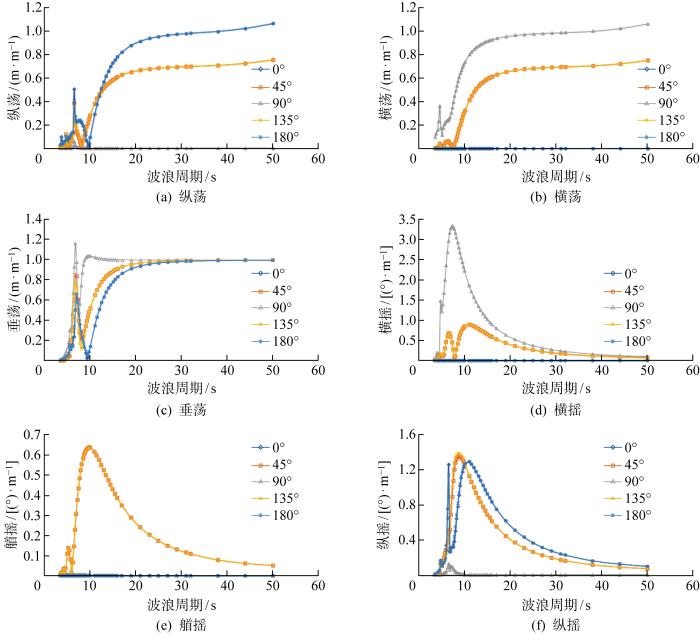
图8
3.2 沉船离底仿真结果
沉船离底状态下,驳船由于受到复杂海洋环境载荷、提升缆张力、系泊缆张力的影响,同时存在沉船重力向驳船转移引起的吃水变化等诸多因素的干扰,其运动响应会变得极为复杂,而六自由度运动响应能够为打捞姿态的安全评估提供有效参考.同样,沉船在离底过程中,由于海底阻力的变化,沉船状态的复杂性也会随之增加.针对上述工况A1~A10给出沉船离底状态下的仿真结果.如图9~10所示分别为沉船离底状态下驳船及沉船的六自由度运动响应极值.可以发现,沉船及驳船的纵荡幅值在A6工况(0°浪向)下达到最大,分别为0.64、0.55 m.A8工况(180° 浪向)下沉船及驳船的横荡运动达到最大值,分别为0.85、0.63 m;垂荡运动极值分别为0.28、0.24 m,此时两者的横摇运动幅值也会显著增加.沉船由于海底土壤吸附力以及摩擦阻力影响,在离底过程中整体受力水平会出现明显改变,容易引起较大的艏摇运动幅值,如A9工况(135°浪向)下沉船最大值为0.56°,而驳船的艏摇运动幅值相对较低,最大值仅为0.17°.此外,波浪入射方向以及参数对沉船和驳船动态响应的影响规律较为一致,在打捞离底过程中,谱峰周期较长的不规则波作用更容易诱发大幅运动.
图9
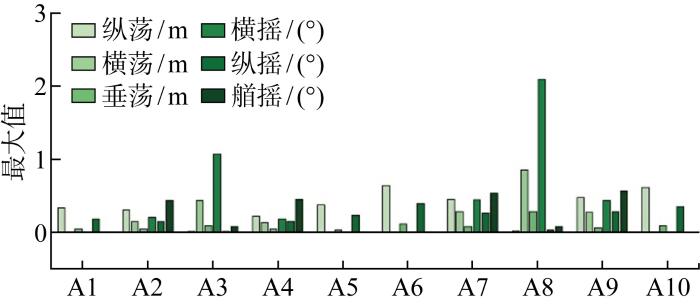
图9
离底阶段各工况下沉船六自由度运动响应幅值
Fig.9
Maximum response of 6-degrees-of-freedom motion of wreck in off-bottom stage
图10
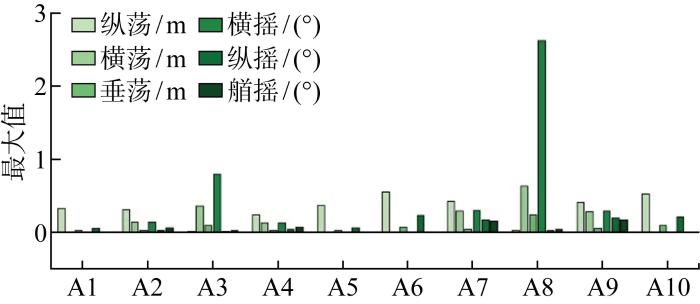
图10
离底阶段各工况下驳船六自由度运动响应幅值
Fig.10
Maximum response of 6-degrees-of-freedom motion of barge in off-bottom stage
对于整个打捞系统而言,提升缆是连接沉船与驳船的关键组件,其张力响应关系到整个打捞过程的稳定性及安全性.针对沉船离底状态,图11给出了各工况下各提升缆P1~P23、S1~S23的张力响应极值.可知,A8工况下可以明显观察到较大的张力响应,P1最高张力极值为 2015.1 kN,且提升缆P#的张力极值整体高于S#缆绳的张力.结合驳船及沉船运动状态分析,可以发现A8工况的横荡、垂荡以及横摇运动明显增大,进一步造成提升缆张力极值激增.由此可以看出,在A8工况进行打捞作业时,提升缆断裂风险会明显增加.
图11
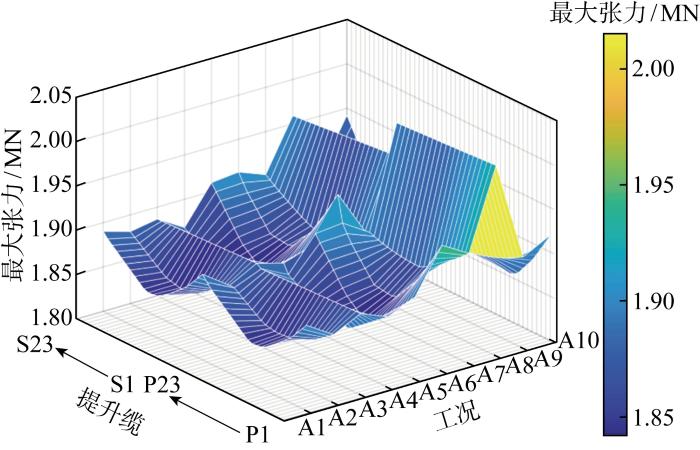
图11
离底阶段各工况下提升缆张力响应极值
Fig.11
Maximum tension of lifting cables in different cases in off-bottom stage
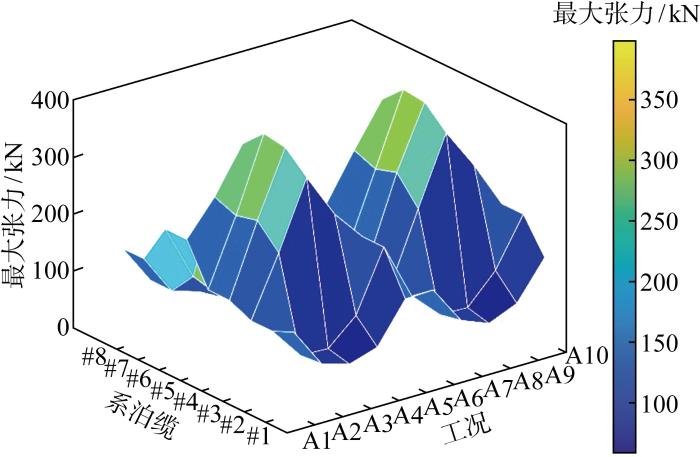
此外,沉船离底过程中的载荷转移会使驳船的吃水以及受力会发生改变,进一步影响系泊系统张力响应.图12所示为沉船离底阶段各工况的系泊缆张力响应极值情况,可以发现A8工况时部分系泊缆张力明显增大,其中锚缆#3、#4、#5、#6张力极值分别为358.5、391.1、402.8、365.0 kN.横浪工况A3、A8下,驳船横荡运动的增加造成另一侧的系泊缆受力极值增大,其显著高于其他遭遇浪向对系泊缆受力的影响.
图12
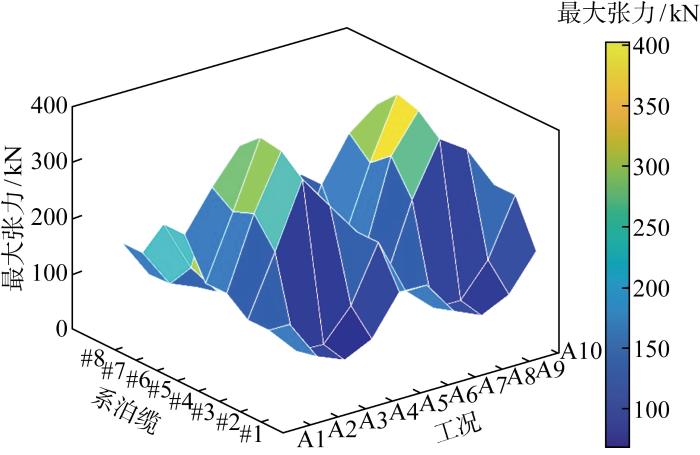
图12
离底阶段各工况下系泊缆张力响应极值
Fig.12
Maximum mooring tension in different cases in off-bottom stage
3.3 沉船部分出水仿真结果
当水下沉船遗址整体提升至出水面后,由于多个浮体之间距离较近,所以浮体之间会出现复杂耦合效应,影响整个打捞系统的稳定性.为分析沉船部分出水状态下系统的动态响应,图13~14分别给出了沉船部分出水时驳船及沉船的六自由度运动响应极值,其中,沉船及驳船的纵荡幅值在A5工况(0°浪向)下达到最大,分别为0.53、0.52 m.A8工况(180° 浪向)下沉船横荡运动达到最大值0.53 m,A3工况(180° 浪向)下驳船横荡运动达到最大值0.47 m.与沉船离底工况仿真结果类似,沉船及驳船的垂荡以及横摇运动响应在A8工况会显著增大.然而不同的是,此时沉船由于脱离海底泥土,并不受离底状态的变化的土壤吸附力影响,因而沉船的艏摇明显减小,由离底状态下的极值0.56° 降至0.17°,而驳船的艏摇变化基本不大.整体而言,与沉船离底工况相比,此时沉船及驳船的水平面运动极值有一定的减小,而垂向运动幅值呈现出部分上升的趋势.
图13
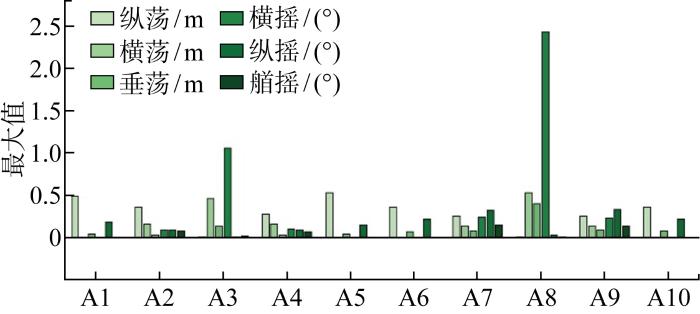
图13
部分出水阶段各工况下沉船六自由度运动响应幅值
Fig.13
Maximum response of 6-degrees-of-freedom motion of wreck in partial effluent stage
图14
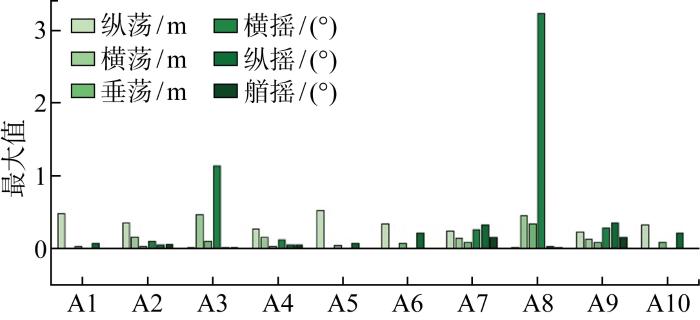
图14
部分出水阶段各工况下驳船六自由度运动响应幅值
Fig.14
Maximum response of 6-degrees-of-freedom motion of barge in different cases
图15所示为沉船部分出水时各工况下提升缆P1~P23、S1~S23的张力响应极值.与沉船离底状态仿真结果类似,A8工况下可以明显观察到较大的张力响应,P1最高张力极值为 1981.8 kN,且提升缆P#的张力极值整体高于S#缆绳的张力.沉船部分出水之后,由于不受海底土壤的影响,沉船的整体净重有所下降,因而导致该状态下的提升缆张力会明显低于沉船离底时的受力情况.图16给出了沉船部分出水状态下各工况的系泊缆张力响应极值情况.同样可以观测到A8工况下部分系泊缆张力明显增大,其中锚缆#3、#4、#5、#6张力极值分别为358.7、393.9、398.2、362.2 kN,整体受力水平与沉船离底状态下的锚缆受力较为接近,且横浪工况会显著高于其他遭遇浪向对系泊缆受力的影响.
图15
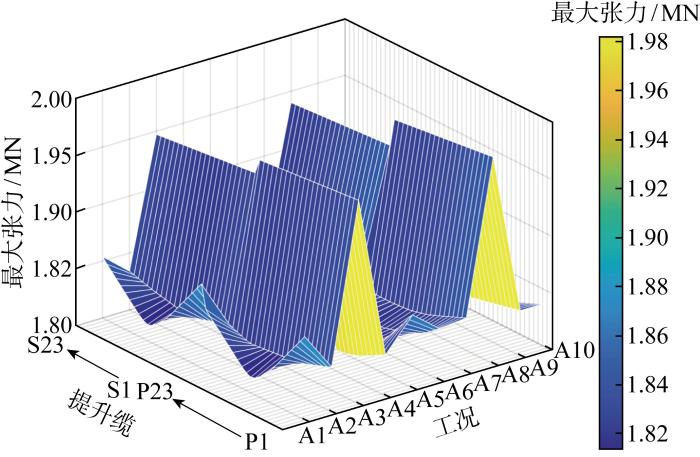
图15
部分出水阶段各工况下提升缆张力响应极值
Fig.15
Maximum tension of lifting cables in different cases
图16
3.4 数值仿真与实船测量结果对比
图17

表5 数值预报与实际测量横摇及纵摇最大值对比
Tab.5
| 类别 | 驳船横摇 | 驳船纵摇 | 沉船横摇 | 沉船纵摇 |
|---|---|---|---|---|
| 实测 | 0.57 | 0.10 | 0.75 | 0.54 |
| A2 | 0.09 | 0.09 | 0.10 | 0.05 |
| A7 | 0.24 | 0.32 | 0.26 | 0.33 |
3.5 综合分析
针对驳船-提升缆-沉船系统,提升缆的动态响应是评价整个打捞过程的安全性的一个重要指标.其中,动力放大系数(fDAF)能够有效表征环境载荷对提升缆产生的动力放大效应,通常被定义为最大动响应与最大静响应之比,即
其中:Tstas和Tdyn分别为提升缆最大静态张力及最大动态张力.
为进一步评估环境载荷及操作工况对提升缆动态响应的影响,图18给出了沉船离底(Case A)以及沉船部分出水状态(Case B)下提升缆的最大静态张力(无风浪流等环境载荷)、动态张力(有风浪流等环境载荷)以及各工况下提升缆动力放大系数极值.可以看出,由于环境载荷的影响,工况A、B下的提升缆最大动态张力较静态张力有一定提升,增幅分别为191.2、170.7 kN.其中,沉船离底过程中提升缆张力以及动力放大系数均高于沉船出水状态下缆绳的动态响应参数,这在一定程度上揭示沉船离底过程中复杂耦合效应所带来的操作风险增加,因而在实际作业过程中需要密切关注.
图18
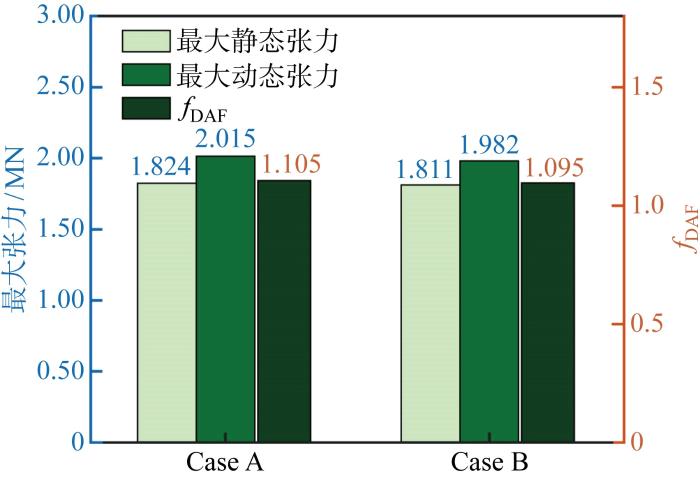
整体而言,仿真结果给出的提升缆张力极值均小于提升缆的破断张力值 3.5 MN,且留有一定阈值.结合前文两种仿真状态下的驳船、沉船运动响应以及系泊缆受力情况,可以推断出本文所设计的打捞系统是安全有效的.
4 结论
针对“长江口二号”沉船的打捞方案开展了数值模拟研究,系统分析了打捞过程中打捞多体耦合系统的状态及作业工况对打捞系统动态响应影响的一般规律,取得主要结论如下:
(1) 横浪工况下,打捞系统的动态响应会显著增加,影响打捞作业的安全性及稳定性,同时需要密切关注提升缆P1、系泊缆#5的受力情况,以保障打捞作业的顺利开展.
(2) 沉船离底状态下的复杂耦合效应会造成提升缆、系泊缆张力响应增大,明显高于沉船部分出水工况下的一般受力.
(3) 设计需综合考虑船体的运动响应,提升缆及系泊缆的受力情况,所设计的打捞方案能够满足作业的安全性及稳定性需求,保证打捞作业的顺利开展.
参考文献
Impacts of pollution derived from ship wrecks on the marine environment on the basis of s/s “Stuttgart” (Polish coast, Europe)
[J].DOI:10.1016/j.scitotenv.2010.07.031 URL [本文引用: 1]
Chronic oiling of marine birds in California by natural petroleum seeps, shipwrecks, and other sources
[J].DOI:10.1016/j.marpolbul.2013.12.023 URL [本文引用: 1]
Lifting forces required to salvage a Sunken vessel and caisson and their response to bottom friction, buoyancy release, surface tension, water capture and water release
[J].DOI:10.1016/j.oceaneng.2016.08.008 URL [本文引用: 1]
Dynamic behaviors of a hinged multi-body floating aquaculture platform under regular waves
[J].DOI:10.1016/j.oceaneng.2021.110278 URL [本文引用: 1]
Numerical and experimental investigation of hydrodynamic interactions of two VLFS modules deployed in tandem
[J].DOI:10.1007/s13344-020-0005-9 [本文引用: 1]
静水中水面倾覆船舶打捞的力学分析
[J].
A mechanics analysis of salvage procedure of floating capsized ship in still water
[J].
CFD & basin test benchmarks for subsea lift analaysis
[C]
沉船打捞多体系统耦合动力响应特性计算研究
[J].
Calculation and research on coupling dynamic response characteristics of wreck salvage multi-body system
[J].
底质对潜坐结构吸附力的试验研究
[J].
Experimental research on breakout force of embedded objects from sediments
[J].
A safety assessment approach of the salvage based on salvor-cable-wreck coupled simulations
[J].DOI:10.1016/j.oceaneng.2022.113537 URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}