

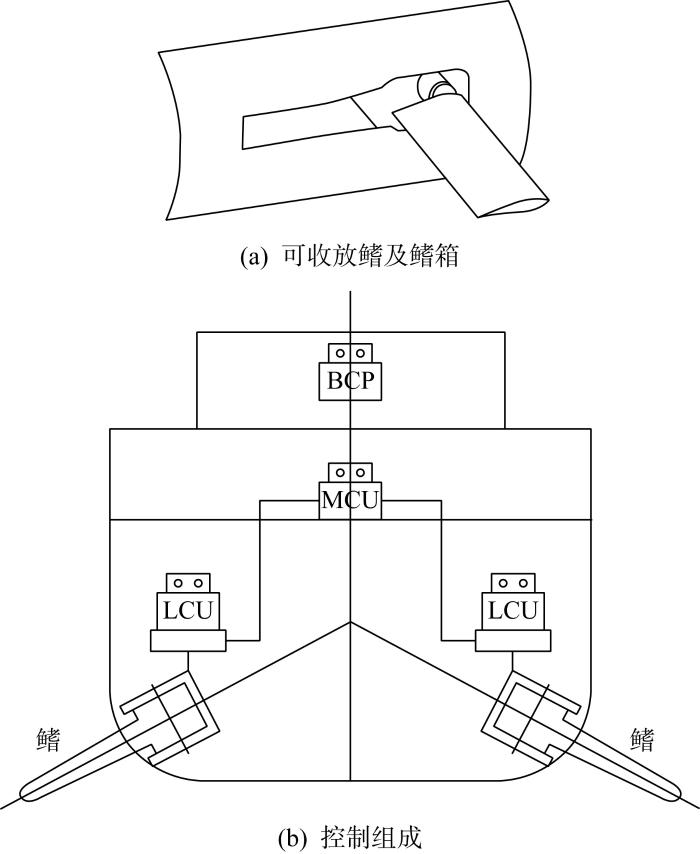
图1
Kim等[6]对安装减摇鳍的邮轮在遭遇波浪条件下的运动进行了数值分析.当船速为23 kn(中等速度)时,减摇鳍控制系统将横摇振幅降低了90.1%.当船速为7 kn(低速)时,横摇振幅降低了52.3%.
为进一步研究船鳍耦合,以一艘中型邮轮为对象,使用重叠网格计算模拟方法对不同攻角下带减摇鳍的邮轮总阻力进行分析,并通过模型试验对计算流体动力学(CFD)结果进行验证.同时也研究了在静水中船鳍耦合作用以及带减摇鳍船舶的升沉和横摇运动,为计算带减摇鳍船舶的设计提供参考.
1 带减摇鳍邮轮船型介绍
以一艘中型邮轮为研究对象,该船1∶55的模型主要参数如表1所示.
表1 船模型主要参数
Tab.1
| 参数 | 数值 |
|---|---|
| 垂线间长,LPP/m | 3.725 |
| 型宽,B/m | 0.564 |
| 吃水,T/m | 0.117 |
| 排水量,Δ/t | 0.174 |
| 湿表面积,Sw/m2 | 2.362 |
| 重心,LCG/m | 1.611 |
| 重心,KG/m | 0.287 |
| 鳍切片翼型 | NACA0021 |
| 鳍弦长,C/m | 0.06 |
| 长宽比 | 2.05 |
| 鳍长,LF/m | 0.124 |
三维模型如图2所示,船中带有一对减摇鳍,鳍安装在水线之下,通过沿自身轴的旋转实现不同角度.
图2

在使用过程中,船两侧的鳍片并不总是对称地旋转.当横摇达到最大程度时,两侧的鳍会发生不对称旋转,以便获得更大抗摇力矩;比如,左舷的鳍向上旋转(顺时针旋转),而右舷的鳍则向下旋转(逆时针旋转),可旋转幅度为±20°,如图3所示.
图3

2 数值方法
由于带减摇鳍邮轮航行时强非线性与黏性的影响,为了获得高精度的模拟,应用雷诺平均纳维-斯托克斯(RANS)求解器和重叠网格进行数值分析.
2.1 控制方程
连续性和动量守恒方程如下[10]:
式中:
2.2 重叠网格技术
重叠网格又称Overset,是将模型中流动区域划分成几何边界比较简单的子区域形成网格,然后嵌套进背景网格中.计算通过在重叠网格区域相互的插值,使得子区域的网格在重叠边界进行数据交换,从而完成整个流场的求解.
3 计算域及网格划分
图4

图5

图6
图7

相关计算表明,在Y+小于100时,能捕捉到减摇鳍附近的流线细节,可获得阻力和运动较好的模拟结果[13].
4 试验设置
在上海交通大学多功能船模拖曳水池进行阻力系列试验.拖曳水池的尺寸 300 m×16 m×7.5 m,拖车最大速度为10 m/s.
图8

表2中列出各种试验状态,主要研究船鳍耦合作用下的阻力.试验工况①~⑧涵盖了不同鳍片攻角和不同船速下有或无鳍片情况.
表2 模型试验工况
Tab.2
| 工况 编号 | 航速/ kn | 弗劳德数 (Fr) | 模型速度/ (m·s-1) | 鳍攻角/(°) | |
|---|---|---|---|---|---|
| 0 | 20 | ||||
| 1 | 5 | 0.057 | 0.3468 | ① | ⑤ |
| 2 | 14 | 0.159 | 0.9711 | ② | ⑥ |
| 3 | 18 | 0.204 | 1.2485 | ③ | ⑦ |
| 4 | 22 | 0.249 | 1.5260 | ④ | ⑧ |
5 数值计算与试验结果比较分析
5.1 CFD结果验证
实验流体力学(EFD)和数值结果如图9所示,该图比较了没有鳍片和有鳍片攻角为0°和20°的实验结果.CFD的结果与试验数据也较为吻合,最大误差范围在4.87%以内.
图9

表3 阻力试验结果对比
Tab.3
| 减摇鳍攻角/(°) | 阻力/N | |
|---|---|---|
| 模型试验 | 0 | 7.775 |
| 模型试验 | 20 | 9.965 |
| DFBI模拟 | 0 | 7.926 |
| DFBI模拟 | 20 | 10.11 |
| 重叠网格模拟 | 0 | 7.789 |
| 重叠网格模拟 | 20 | 10.066 |
不同攻角的鳍平均阻力增量为8.252%,而在最大鳍片角度下阻力增量高达19%.船鳍耦合的CFD计算误差低于5%,而仅计算均匀流场中鳍的阻力,其结果会高估约40%.
5.2 鳍的阻力评估
在指定的雷诺数
由于局部速度的不稳定,引入了平均
式中:μ为动态黏性系数;L为鳍片长度.
根据鳍片的局部雷诺数,计算鳍片的阻力,并与实验结果进行比较.鳍片的阻力如表4所示.
表4 模型状态下减摇鳍20° 时阻力
Tab.4
| Fr | Re | 减摇鳍阻力/N | ||
|---|---|---|---|---|
| 试验 获得值 | CFD计算值 | 不考虑船体 计算值 | ||
| 0.159 | 1.19×105 | 1.834 | 1.749 | 2.598 |
| 0.204 | 1.53×105 | 2.7596 | 2.7617 | 3.946 |
| 0.249 | 1.87×105 | 4.0437 | 4.0648 | 6.098 |
为了详细分析鳍片效应,采用重叠网格计算不同船速下鳍片表面的局部压力和摩擦力并进行比较,如图10所示.分析鳍片的摩擦因数可知,随着船航行速度增加,在0° 的鳍片上有两个集中的高摩擦区域,其中相对更高的区域靠近船体.然而,在20° 鳍片上,摩擦因数高的区域集中在鳍的导边.从压力分布分析,随着鳍片攻角较大,高压区集中在导边,以提供升力.
图10
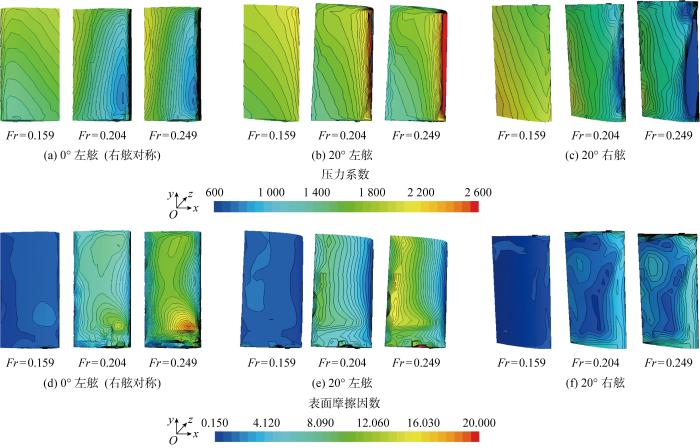
图10
在不同的速度下船鳍的压力和表面摩擦因数的详细分析
Fig.10
Detailed analysis of fin pressure and skin friction factor at different speeds
5.3 静水中带鳍船运动分析
在静水中18 kn服务航速下,对不同攻角带鳍船体的运动进行模拟.在速度较低时,船舶的升沉和纵倾不会影响船舶的阻力结果.减摇鳍在船中布置时主要影响船舶的横摇,故在模拟时开放了船舶的升沉和横摇两个自由度,计算结果参见表5.由表可知,减摇鳍为0° 时,CFD计算与模型试验在船舶运动误差较小,平均横摇误差为1.796%,说明使用重叠网格能够较好计算出带减摇鳍船舶在航行时的运动状态.
表5 18 kn航速时船舶运动的试验与数值结果对比
Tab.5
| 类型 | 升沉/cm | 横摇/(°) | 减摇鳍攻角/(°) |
|---|---|---|---|
| 模型试验 | -0.2574 | -0.0167 | 0 |
| 重叠网格 | -0.2835 | -0.0170 | 0 |
6 结论
减摇鳍是一种有效的提升船舶舒适性的装置,在邮轮上应用广泛.减摇鳍的效果以及船鳍耦合作用的影响一直是工程界研究的热点问题.以一艘中型邮轮及其减摇鳍为研究对象,通过模型试验和使用重叠网格进行数值计算,分析对比结果,得出以下结论:
(1) 试验提供了可靠的船鳍作用下阻力结果.在不同船速下,不同攻角的鳍平均阻力增量超过8%,而在最大鳍片角度下阻力增量高达 19%.由试验得出,鳍片阻力在20°攻角比0°下增加4倍.试验结果表明鳍片诱导阻力影响显著,在设计中应该予以重视.
(2) 采用重叠网格CFD进行非定常分析计算了船鳍耦合和非耦合情况的鳍片阻力.船鳍耦合的CFD计算误差低于5%,而仅计算均匀流场中鳍的阻力,其结果会高估约 40%,船鳍耦合效应不可忽略.根据详细的流场信息和计算结果,发现随着速度提高,减摇鳍的高压区向前缘移动,而摩擦区向后缘移动.
(3) 对静水中减摇鳍的数值计算方法进行了研究,发现计算时减摇鳍部分Y+需小于100,才能精确捕捉船鳍耦合运动的流场,获得精度较高的船舶运动数据.
使用重叠网格对不同攻角减摇鳍进行分析,有利于理解船鳍耦合作用下鳍的阻力并提出高保真数值分析.使用重叠网格的数值计算与试验结果吻合较好,对实验中船体运动预报误差较小,为后续进一步计算波浪中的带减摇鳍船体运动分析提供了基础.
参考文献
Simulation and analysis of Magnus rotating roll stabilizer at low speed
[J].DOI:10.1016/j.oceaneng.2017.07.012 URL [本文引用: 1]
Dynamic behaviour and operational limits of stabilizer fins
[C]
Computer and experimental simulations on the fin effect on ship resistance
[J].
Ship roll damping control
[J].DOI:10.1016/j.arcontrol.2012.03.010 URL [本文引用: 1]
Location analysis of patrol boat fin stabilizer based on numerical method
[J].
Motion control of a cruise ship by using active stabilizing fins
[J].DOI:10.1177/1475090211421268 URL [本文引用: 1]
静水中自由船模拖曳CFD模拟方法研究
[J].
Numerical simulation of free ship model towed in still water
[J].
Design of the roll stabilization controller, using fin stabilizers and pod propellers
[J].DOI:10.1016/j.apor.2011.07.005 URL [本文引用: 1]
波浪中KVLCC2运动与阻力增加的CFD计算及分析
[J].
CFD verification and analysis of added resistance and motions of KVLCC2 in head waves
[J].
Two-equation eddy-viscosity turbulence models for engineering applications
[J].DOI:10.2514/3.12149 URL [本文引用: 1]
基于RANS方程的高速滑行艇阻力计算
[C]
The resistance calculation of the high-speed planing based on RANS equations
[C]
Experimental and numerical resistance analysis for a cruise ship W/O fin stabilizers
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}