

1 背景介绍
沉船整体打捞[1]是一门实践性、综合性非常强的技术,包括地质勘测、探摸沉船破损情况及质量分布、安装吊索具、整体起浮、移位以及相关的方法、设计、计算、装备与工艺等.整体打捞对一个国家经济、国防以及文化建设都有重要意义,世界航运发达国家都十分重视并加强打捞能力建设.传统打捞沉船的方法[2]主要有封舱抽水打捞法、浮筒打捞法、船舶抬撬打捞法、泡沫塑料打捞法、围堰打捞法及充气排水打捞法等,其中浮筒抬浮打捞方法应用最为普遍,但该方法通常适用于小吨位沉船打捞.这些传统打捞方法多需要对沉船内部进行替换或改造,会对沉船本身造成较大损伤[3].对于需要研究沉船事故原因、防止沉船污染、研究军事战略、历史古船等则需在打捞时尽量避免沉船本体的结构损伤,以确保对沉船研究分析的准确性.传统的沉船打捞方法已越来越不能满足当前大吨位沉船整体打捞的技术要求,开发一种新型的沉船打捞技术迫在眉睫.
古沉船满载着瓷器、金银器、钱币等大量珍贵文物,蕴含着丰富的历史文化信息,而船体结构本身则是研究当时造船技术的重要依据.为了更好地还原古沉船的原貌、降低修复难度并提高修复精度,需要保证打捞作业时沉船的原生性、完整性和安全性.对于新近失事沉船的打捞工作,为了更好地还原灾害场景、分析灾害发生的原因及演变过程,并最大程度地保护遇难者遗骸和遗物的完整性,需要尽量避免采用接触式的打捞作业方法并降低打捞作业对失事沉船的扰动.此外,军事战略意义的沉船及潜艇打捞,为了更好地分析事故原因、制定后续改进方案[4-5]等,也需要尽量在整体打捞时减小对船体本体结构损伤.目前,国内外沉船打捞案例中除了“南海一号”是非接触式整体打捞外,其余均是接触式整体打捞,即吊索具或托底钢梁与沉船有直接接触,这样会对沉船本体有一定损伤.而打捞“南海一号”采取的“钢沉箱+底部托梁”[6-7]无接触式打捞作业方法施工周期长,受天气影响严重,沉箱上的压重对沉船及文物造成了一定损伤.对于传统的沉船整体打捞,船底穿钢梁方法一般是先在沉船两侧挖泥留出空间,分别下放沉箱和钢梁,再通过工程船上的绞车将每根钢梁拖拉穿过船底,沉箱与所有钢梁连成整体来保护古沉船.传统穿钢梁方法精度控制难,挖泥量大,且有回淤影响和塌陷的可能,不仅影响整体施工进度和增加成本,而且安装钢梁过程中对沉船有碰撞、扰动的风险,因此船底穿钢梁是目前古船整体打捞项目中施工最困难的环节.另一方面,海上作业受海流、风浪、气候影响等限制,且水下能见度低,定位探测手段有限,水下工作通常需要通过潜水员完成,导致效率低、成本高、作业风险大.
为了实现水下机械化自动穿钢梁,提高施工效率,降低安全风险,并且保证沉船及货物本身的原生性及完整性,上海打捞局提出一套小曲线顶管法水下沉船整体打捞技术.该技术通过弧形梁连续掘进穿过沉船底部,将沉船整体及周边原生物包裹其中,相邻托底弧形梁采用两侧锁扣连接、密封,待所有弧形梁施工完毕后由液压提升设备整体起浮,再运输上岸.在“长江口二号”古船整体打捞项目实施之前,顶管施工案例多数采用小直径、短距离直线管节,仅有零星顶管工程案例采用了曲线管节,如2019年港珠澳大桥拱北隧道底幕工程[8]采用了长距离大直径曲线管节,但采用小曲率半径管节进行施工的案例尚未见于报道.此外,已有的顶管技术均采取水平顶进,管节自重对顶进的影响较小,工程中尚未见结合管节自重的竖向顶进案例.
虽然顶管技术已经广泛应用于给排水、电力、油气等管道工程建设中,也得到了不断的发展及应用,但均以短距离、小直径、直线顶管居多.之前,仅有德国柏林地铁勃兰登堡门站暗挖工程及我国珠海拱北隧道等少数工程应用了曲线顶管技术,而小曲率半径曲线顶管案例在此之前是空白[9].曲线顶进主要体现于水平面曲率的变化,而竖向曲线顶管的工程案例在之前也几乎为空白.此外,长距离顶管工艺多采用分管节顶进的方法,而采用全长管节一次顶进的工程案例较为少见.
针对上述大吨位水下沉船无接触整体打捞关键技术瓶颈,本文通过创新设计和模型、等比例试验验证,开发出一套能够将沉船、载物以及周围泥沙按原状打捞出水的整套装备——弧形梁系统.该套系统装置充分利用了曲线顶管施工速度快、自动化程度高、应对环境适应能力强、水下作业需求小、对环境扰动小的特点,可以实现水下沉船的无接触、微损伤整体打捞,可以确保沉船及其载物的原生性和完整性,并且成功应用到“长江口二号”古船整体打捞项目中.从工程应用效果来看,该技术和装备解决了传统打捞方式对被打捞沉船及货物较大损伤的问题,降低了现场作业难度、施工风险和沉船受到损害的可能性,节约了人力物力,且保证了沉船的完整性,是值得推广的新型整体打捞技术装备.
2 弧形梁系统介绍
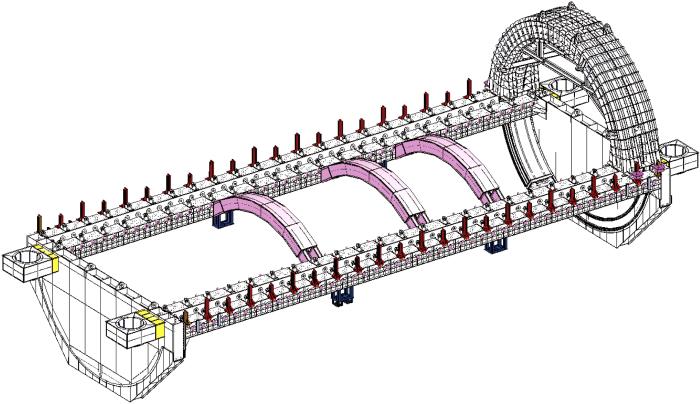
本文介绍的弧形梁系统为“长江口二号”古船量身打造,其目的是满足业主提出的打捞施工过程中要保证古船及其附近原生遗址的完整性、原生性、安全性,以及减少潜水工作量、提高施工效率.根据古船尺寸及业主方的要求,设计并制造的弧形梁系统主要包括2块端板、4根纵梁、22根弧形梁、1套发射架、1套刀头、1套后推进,系统的整体示意图如图1所示.端板与纵梁预组装成组合框架,作为弧形梁安装的始发及接收基座.发射架为弧形梁的发射装置,内置齿条、坦克链、后推进.正式施工时,先将端板纵梁组合框架预放入沉船区域并下放置设计入泥深度,打捞刀头装入弧形梁前端,整个弧形梁沿发射架内齿条装入发射架内,弧形梁的末端与后推进装置用螺栓连接.装有弧形梁的发射架整体起吊后置于纵梁上,通过插销将发射架与端板纵梁框架相连接.通过液压驱动后推进带动弧形梁沿着发射架弧形方向贯穿于古船下方,顶进过程中打捞刀头刀盘转动搅松泥土,送排泥泵将泥沙抽至水面排出.
图1
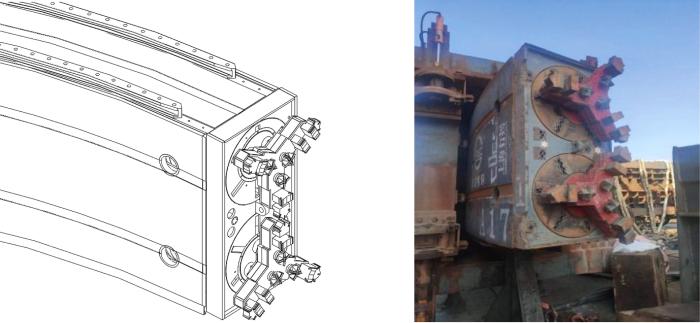
端板尺寸为19 m×9 m×1 m,呈倒梯形结构,内侧嵌母锁扣,母锁扣与弧形梁公锁扣配合,在穿梁过程中作为弧形梁导向,弧形梁沿锁扣半圆轨道贯穿过古船底部,如图2所示.
图2
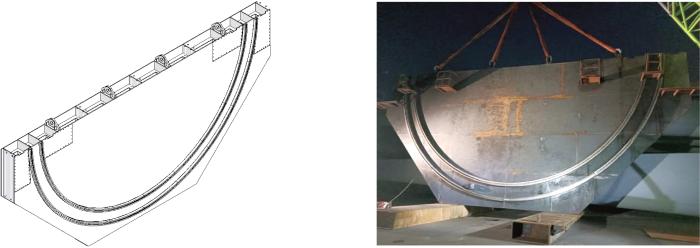
图3
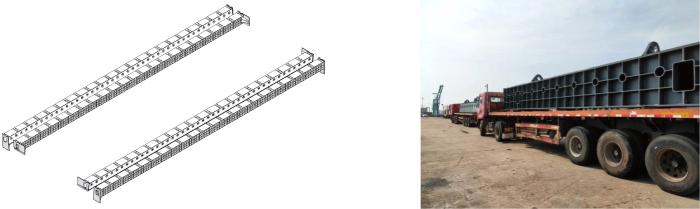
图4
弧形梁结构如图5所示,为半圆形结构,内径为7.5 m,外径为8.5 m,宽度为2 m.除中间一根B型弧形梁、两侧为2个公锁扣外,其余弧形梁两侧均为一侧公锁扣、一侧母锁扣,穿梁后弧形梁之间锁扣两两配合扣住,与纵梁端板组合形成弧形框体,可将古船整体包裹其中进行提升.
图5

图6
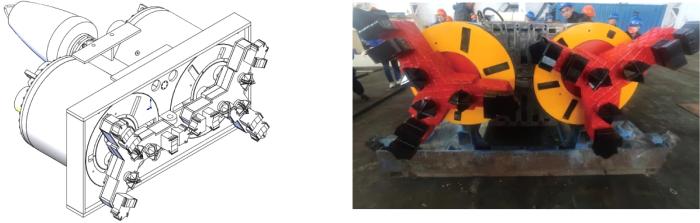
图7
后推进装置如图8所示,为弧形梁推进动力装置.后推进装置预置于发射架内,并与弧形梁尾端连接,后推进上的齿轮沿着发射架内的齿条轨道顶推弧形梁前进.
图8
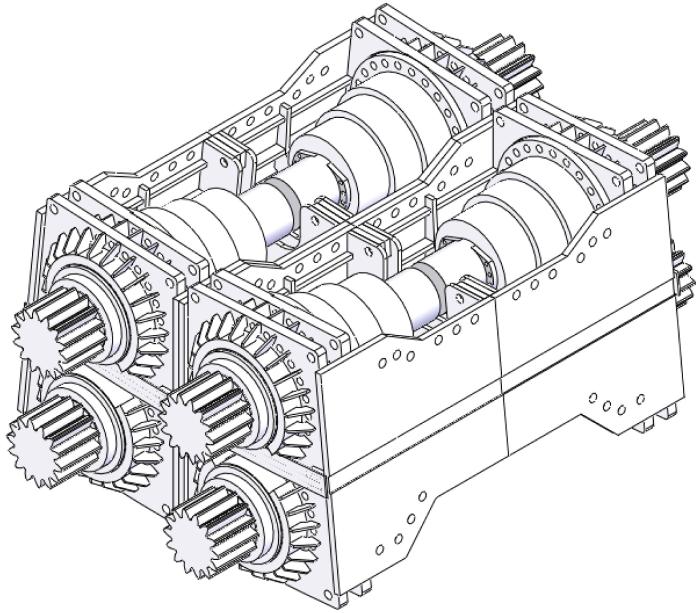
发射架装置如图9所示,为弧形梁发射机架.发射架为框架型结构,施工时先将弧形梁沿着轨道装入发射架内,弧形梁推进端与后推进装置通过螺栓连接到一起,随后将发射架整体起吊安装至纵梁上,液压驱动后推进将弧形梁沿着发射架腔体弧形顶推至古船下方再穿出,通过销轴将弧形梁与纵梁连接形成整体.
图9
3 弧形梁系统结构强度及稳定性分析
在吊运、下放入泥、穿弧形梁以及整体抬浮过程中,弧形梁系统结构强度和稳定性对整个方案的顺利进行尤其重要.因此,针对纵梁结构的设计进行强度及稳定性计算分析,验证其满足设计要求.
图10
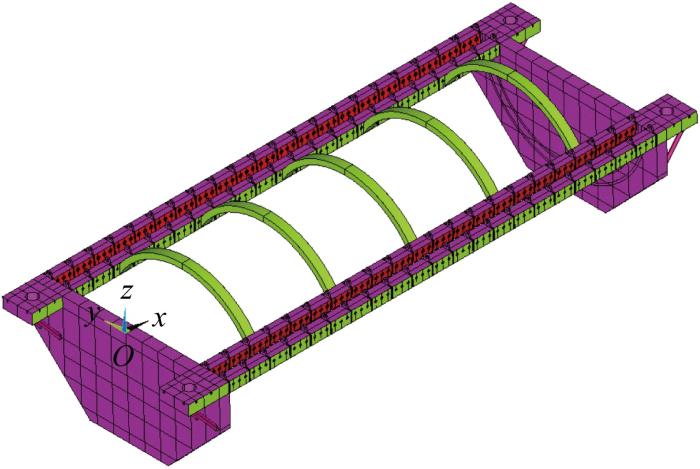
图11
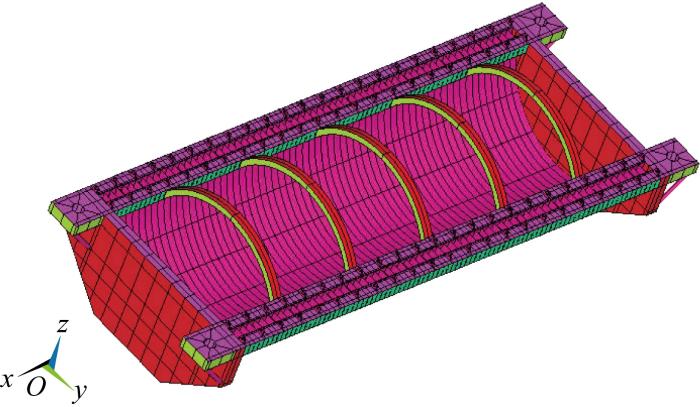
图11
纵梁和弧形梁整体结构几何模型
Fig.11
Geometric model of integral structure of longitudinal beam and curved beam
纵梁结构材料为Q345钢.所有板材均采用4节点壳单元Shell181进行模拟,纵梁结构有限元模型单元总数为 126937,节点总数为 241102;纵梁和弧形梁整体结构有限元模型中,弧形梁和纵梁之间的销轴利用MPC184单元模拟,模型单元总数为 373712,节点总数为 333896.
工况1 模拟纵梁结构整体入水前吊运过程,设置8个吊点.为节约计算资源,考虑结构及其受载关于中纵剖面对称,对关于中纵剖面对称的半模型进行分析计算.中纵剖面处施加对称约束,4个吊耳处施加简支约束:纵梁结构吊运过程中的自身质量,由软件自动加载,吊耳处根据吊绳夹角(60°)施加x/y水平方向分力,动力放大系数取1.5.
工况2 模拟纵梁结构整体下水、下压入泥至要求水深过程.同工况1对关于中纵剖面对称的半模型进行分析计算,中纵剖面处施加对称约束,端板底部施加位移约束.
(1) 纵梁结构克服下沉入泥的阻力,包括端部土极限承载力和侧面板的摩擦阻力.
(2) 纵梁结构下水入泥后,结构所受的水压力和土压力.沉船处泥面的水深为10 m,纵梁结构上的水压力按完全入泥状态计算,水压力按
工况3 模拟第一根弧形底托梁安装过程,定位桩周围结构施加位移约束.
(1) 第一根弧形梁安装后对纵梁端板的反推力,按照200 t计算.
(2) 纵梁结构所受的水压力和土压力.沉船处泥面的水深为10 m,纵梁结构上的水压力按完全入泥状态计算,水压力按ρ1gh1沿法向垂直作用于结构面;水下泥质浮重度取ρ2=0.9 t/m3,土压力系数为0.5.最大入泥深度为8.5 m,泥土压力按0.5ρ2gh2沿法向垂直作用于结构面.
工况4 模拟最后一根弧形底托梁安装过程.同工况1对关于中纵剖面对称的半模型进行分析计算,中纵剖面处施加对称约束,定位桩周围结构施加位移约束.沉船处泥面的水深为10 m,纵梁结构上的水压力按完全入泥状态计算,水压力按ρ1gh1沿法向垂直作用于结构面;水下泥质浮重度取ρ2=0.9 t/m3,土压力系数为0.5.最大入泥深度为 8.5 m,泥土压力按0.5ρ2gh2沿法向垂直作用于结构面.
工况5 模拟整体抬浮起吊过程,共23×8=184个吊点,模型中吊点处施加简支约束.
(1) 抬浮时的最大抬浮质量,施加在弧形梁上.考虑水下浮力,沉船遗址总质量按1 万t计,本次吊装作业选取动载系数为1.1,即考虑动载系数后的沉船遗址质量载荷为1.1 万t.
(2) 整体结构所受的水压力和土压力.沉船处泥面的水深为10 m,纵梁结构上的水压力按完全入泥状态计算,水压力按ρ1gh1沿法向垂直作用于结构面;水下泥质浮重度取ρ2=0.9 t/m3,土压力系数为0.5.最大入泥深度为8.5 m,泥土压力按0.5ρ2gh2沿法向垂直作用于结构面.
按所述边界条件对有限元模型施加约束,按所述载荷对有限元模型施加载荷,进行强度分析计算,结果如表1所示.然后应用Block Lanczos方法进行稳定性分析计算(Eigen Buckling),获取结构的屈曲特征值.
表1 有限元计算结果
Tab.1
| 工况 | 单元 | 应力类别 | 应力最大值/MPa | 应力许用值/MPa | 最大变形/mm | 屈曲特征值/MPa | 评估结果 |
|---|---|---|---|---|---|---|---|
| 1 | 壳单元 | 等效应力 | 55 | 295 | 6 | 46.19 | OK |
| 剪应力 | 22 | 170 | 6 | 46.19 | OK | ||
| 2 | 壳单元 | 等效应力 | 199 | 295 | 6 | 11.25 | OK |
| 剪应力 | 57 | 170 | 6 | 11.25 | OK | ||
| 3 | 壳单元 | 等效应力 | 199.5 | 295 | 9.6 | 10.45 | OK |
| 剪应力 | 65 | 170 | 9.6 | 10.45 | OK | ||
| 4 | 壳单元 | 等效应力 | 183 | 295 | 12 | 8.32 | OK |
| 剪应力 | 40 | 170 | 12 | 8.32 | OK | ||
| 5 | 壳单元 | 等效应力 | 250 | 295 | 14.5 | 2.04 | OK |
| 剪应力 | 115 | 170 | 14.5 | 2.04 | OK |
图12
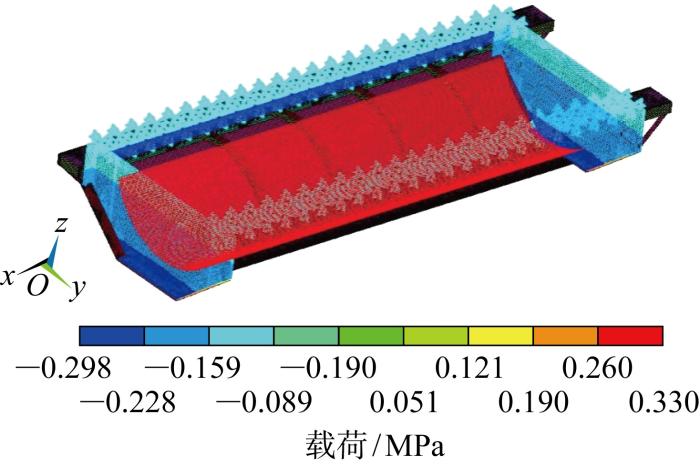
图13

图13
工况5的单元等效应力云图(全模型结果)
Fig.13
Cloud diagram of equivalent stress of shell element of working condition 5 (full model result)
图14
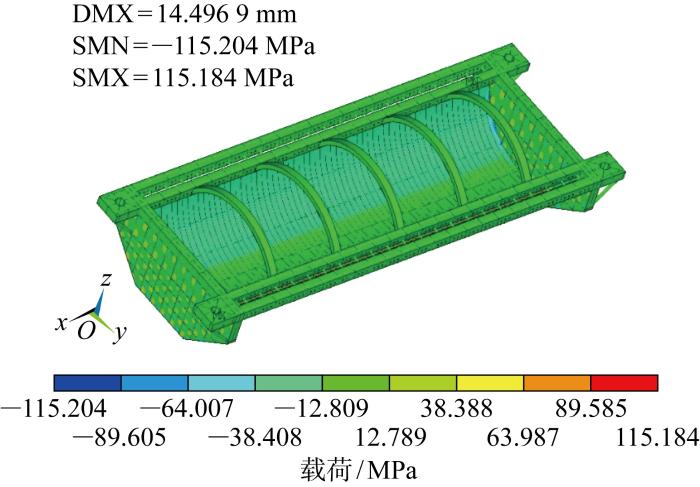
图14
工况5的壳单元最大剪应力云图(全模型结果)
Fig.14
Cloud diagram of equivalent stress of shell element of working condition 5 (full model result)
图15
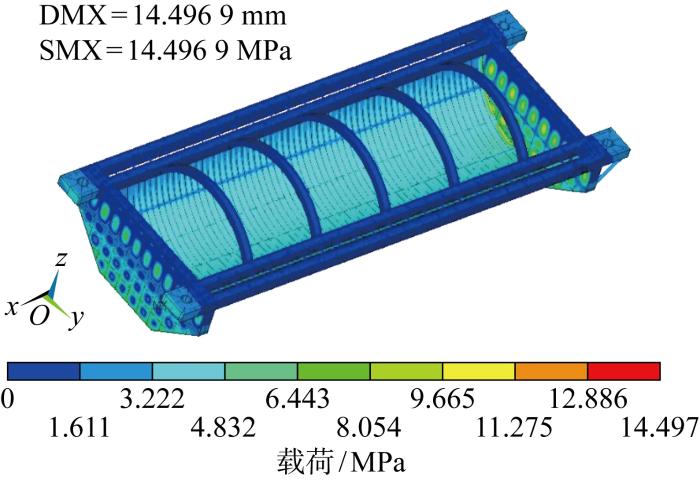
图15
工况5的总变形云图
Fig.15
Cloud diagram of total deformation of working condition 5
图16
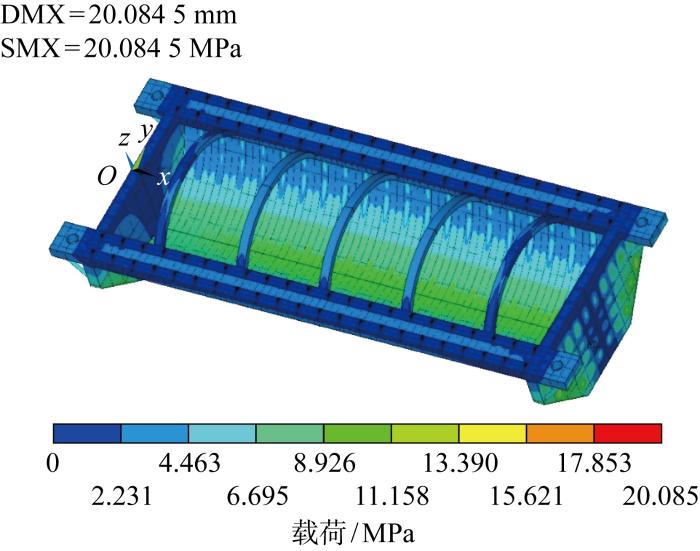
图16
工况5的屈曲结果云图
Fig.16
Cloud diagram of buckling results of working condition 5
4 工程应用
本文弧形梁系统于2022年上半年完成加工制造,下半年成功应用到“长江口二号”古船整体打捞项目中.整个施工阶段包括陆地弧形梁系统结构加工制造、端板纵梁组装、打捞框架沉放、弧形梁安装、整体起浮,具体如下.
(1) 端板机加工.端板在22 m立车上进行机加工,如图17所示.纵梁定位尺寸公差为 ±0.5 mm,整体尺寸公差为 ±0.5 mm,锁扣半径公差控制在 -0.1~-0.5 mm内.
图17

(2) 弧形梁机加工.弧形梁在22 m立车上进行机加工,如图18所示.弧形半径公差为±(0.1~0.5) mm,其他尺寸公差控制在 ±0.5 mm 内.
图18

(3) 端板纵梁组装.如图19所示,纵梁采取分段制造,与端板进行组装,预先将端板固定在驳船上,并预置好纵梁支撑架,将纵梁逐根吊装至支撑架上,用螺栓将纵梁与端板及纵梁之间连接.
图19

(4) 发射架试装及弧形梁试穿.为了确保海上施工顺利进行,纵梁组装完毕后发射架在纵梁上进行试装,如图20所示.弧形梁在端板上也成功进行了试穿,证实了结构件加工及组装精度满足施工要求.
图20

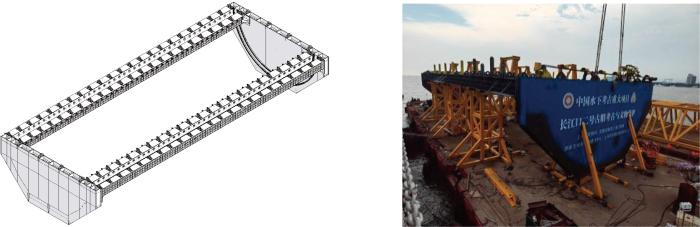
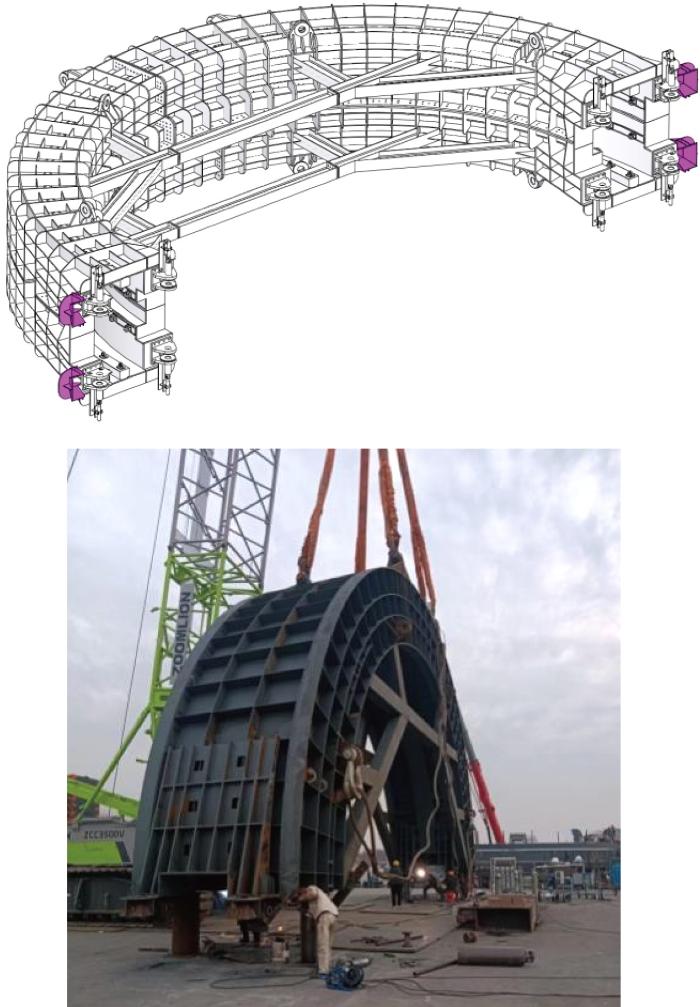
(5) 打捞框架下放.为了防止端板纵梁组成的打捞框架在下放过程中产生变形,利用特制吊架对端板纵梁进行下放作业,如图21所示.
图21
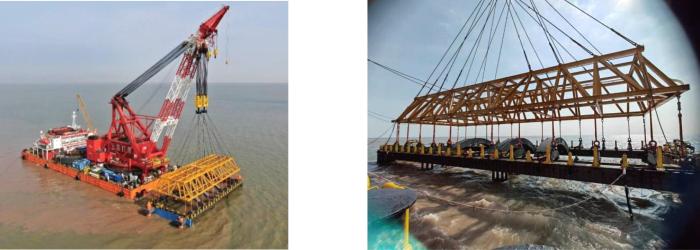
图21
端板纵梁组合框架下放
Fig.21
Launch of end plate and longitudinal beam composite frame
(6) 弧形梁穿入发射架.使用葫芦及甲板绞车将弧形梁装入发射架中,如图22所示.之后进行弧形梁与后推进的连接作业,连接完成并且经过调试后即可进行起吊穿梁作业.
图22
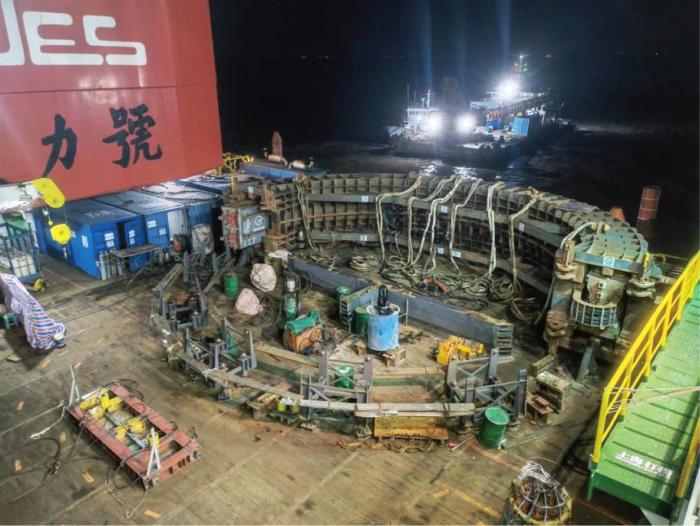
图23

图24

图24
安装弧形梁(排泥泵排泥)
Fig.24
Installation of curved beam (sludge pump for sludge discharge)
(8) 弧形梁穿引完毕.依次对弧形梁进行穿引,最终完成穿梁作业,使得古船完全包裹于弧形梁与纵梁端板形成的框架内,如图25所示.
图25

图26

图27

图27
古船与弧形梁系统整体上岸
Fig.27
Landing of ancient ship and curved beam system onshore
5 应用效果及展望
不考虑天气因素影响,现场仅使用一个半月就高效完成了整个打捞框架下放、22根弧形梁安装及古船整体起浮,相比传统整体打捞方法,既节省了资源、工期,又减小了施工安全风险,受到国家文物局、市政府及业主等一致好评.
(1) 应用及推广.综合考虑传统穿钢梁打捞方法的优缺点,弧形梁系统设计采用小曲线顶管依次沿半圆形轨迹从“长江口二号”古船下方穿越过地层形成弧形的托盘结构,利用纵梁结构为弧形底托梁的安装提供导向和支撑,最后两端加封板以完成整体抬升.此技术解决了传统打捞方式难以保证沉船完整性的问题,降低现场作业难度和施工风险以及沉船受到损害的可能性,节约人力、物力,并且能保证沉船的原生性、完整性、安全性,可以为今后精细化打捞项目应用提供良好的设计思路.
(2) 经济效益. 利用弧形梁方案进行沉船整体打捞,除了为整体打捞项目提供技术支撑外,也取得了较好的经济效益.采用弧形梁方案,首先,机械化、自动化程度高,台风影响时撤场快;潜水工作量少,施工效率高,海上施工周期短,减少了人员、机械设备、船舶等资源施工和等待时间,节省了资源成本.其次,现场挖泥量少,无塌陷风险;纵梁沿定位桩下放安装,受水流影响小,对沉船无扰动风险;弧形梁安装过程中不受水流影响,且由于有切削装置,所以顶穿过程受泥土阻力小;安装工序简单.最后,弧形梁方案采用无接触式的沉船整体打捞方法,最大程度上保护沉船本体免受干扰受损,可以更好地还原沉船灾害场景、最大程度地保护遇难者遗骸和遗物的完整性,以及最大程度保护古船本体及其内的文物等.因此,从保护沉船本体的经济价值来考虑,采用弧形梁方案非常合适.
(3) 局限及未来展望.本次研制的弧形梁系统打捞技术自动化水平相比传统打捞方法有了质的提高,但还不能实现100%水下全自动化,部分水下安装工作如水下拆打捞刀头及后推进装置等还需要水下潜水员操作,施工效率和打捞深度因此受到限制.今后,将继续对弧形梁系统进行深化研究及改造,以满足未来大深度打捞沉没于水中的不同规模和任意形状物体,包括打捞古沉船及其他船舶、飞行器、货物等,实现大深度、大吨位水下全自动高科技打捞.
6 结语
利用曲线小顶管技术设计并开发研制的弧形梁系统,无论在施工工艺、施工效率、安全风险、被打捞结构物本体完整性等方面,相对于传统打捞方法都具有质的飞跃,并且成功应用到“长江口二号”古船整体打捞项目中,受到各界一致好评.弧形梁系统的研制并成功应用,将为今后大吨位沉船整体打捞方案的制定提供成套的基础性支撑,提高施工效率,节约打捞时间,保证工期,减少施工资源和成本,创造直接经济效益.预期在考古、打捞等领域产生较好的应用前景,为我国乃至国际水下打捞技术的突破提供支撑,同时提升我国打捞事业的国际地位及影响力.
参考文献
“南海一号”古沉船的整体打捞
[C]//
The overall salvage of the ancient vessel “Nanhai No.1”
[C]//
海上抢险打捞的技术发展
[C]//
Technical development of maritime rescue and salvage
[C]//
救助打捞装备现状与发展
[J].
救助打捞是国家应急保障体系的重要组成部分,承担着我国海上人命、财产、环境救助、沉船沉物打捞及其他对海上运输和海上资源开发提供安全保障等多项任务。加强救助打捞装备技术研究,是提高救助打捞综合能力的根本,是国家发展战略的重要构成。救助打捞装备专业性强,具有在高海况和大深度条件下工作可靠的适应性特点,同时又是诸多陆上装备向海上和水下发展的延伸,存在相通之处。救助打捞装备交叉机械、电气、流体、微电子、材料等多学科,其关键共性技术又不仅仅局限于救助打捞领域,在海上运输、海洋油气开发、海洋勘探、军事等领域均有应用。以救助船舶、救助飞机、海上搜寻装备、溢油处置装备等代表性的救助装备和打捞工程船、攻千斤装备、水下作业装备、饱和潜水装备、起浮装备等代表性的打捞装备为对象,分析该领域国内外发展现状和趋势,提出救助打捞装备面临的关键技术问题,为我国救助打捞装备的发展战略研究提供参考。
Current development of rescue and salvage equipments
[J].Rescue and salvage is an important part of the national emergency security system to undertake life, property, environment rescue and sunken objects salvage. It also provides security of maritime transport and offshore resource development and many other tasks. Strengthening the equipment technology research is the fundamental to improve the rescue and salvage comprehensive ability and is an important part of the national development strategy. Many specialized rescue and salvage equipments are developed ahead from the onshore equipments with the adaptability features of reliable to severe marine condition and great depth. Also rescue and salvage equipments cross mechanical engineering, electrical engineering, fluid power transmission and control, microelectronics, materials, etc. And the key techniques are not only limited to the rescue and salvage engineering, but also maritime transport, offshore oil and gas development, marine exploration, military and other applications. Therefore, aiming to induce the key technical problems and significant challenges in researches on rescue and salvage equipments, the current development is analyzed on the rescue ship and aircraft, maritime search equipment, spilled oil disposal equipment, floating crane, undersea penetrator, saturation diving equipment, and so on. These provide reference development strategy for our country in the field of rescue and salvage engineering.
我国沉船打捞技术的研究现状
[C]//
Research status of sunken ship salvage sechnology in China
[C]//
“南海I号”整体起浮方案的设计与施工工艺
[J].
Design of the integral floating plan and salvage technology for the “Nanhai I” ancient wreck
[J].
拱北隧道大直径曲线管幕顶管顶力研究
[J].
Analysis on the jacking load of the curved pipe roof supporting the large diameter Gongbei tunnel
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}