

大规模的风电并网、长距离的输送线路、风能不稳定这些问题大大降低了系统的阻尼,因此当系统发生跳闸、三相接地短路或是小扰动干扰时,易引起传输线路的功率低频振荡.迄今为止,已经发现多次电力系统低频振荡现象,给电力系统带来很大影响.在国内,随着中国新疆维吾尔自治区北部地区风电装机容量的迅速增加,自2014年6月以来,广域测量系统已反复捕获次同步频率下的持续功率振荡[3].在国外,德克萨斯电力可靠性委员会电网中已经发现多次4 Hz的低频振荡[4].在此类严重事故中,低频振荡甚至会激起附近涡轮发电机的强烈扭转振动,从而导致发电厂的所有发电机跳闸.因此,有必要增强包含风电的混合电力系统的阻尼,以提高系统频率稳定性.
为保证风电并网系统稳定安全运行,很多国家已经出台相关的政策规定在风电机组中必须带有可以增强系统阻尼的附加环节.文献[5]中提出基于区域极点配置的风电系统弱阻尼低频振荡抑制控制策略,采用线性矩阵不等式的区域极点配置方法设计反馈控制器,将系统中的弱阻尼振荡模式配置到所控制区域,提高系统的阻尼比.文献[6]中以系统的频率偏差值作为输入,根据不同的风速设置桨距角,设计基于变系数的下垂控制调节风力发电机的有功出力,为系统注入正阻尼.文献[7]中根据两区域电力系统模型,选择合适的输入输出变量,对输入函数和状态函数求导得到反馈控制律,提出基于非线性控制算法的附加阻尼控制策略,可以有效地处理阻尼控制器中的非线性环节.文献[8]中将双馈风力发电机(DFIG)和电力系统静态稳定器(PSS)放在一起,建立系统的状态方程,定义系统振荡模式对传递函数的灵敏度,然后运用定义的灵敏度优化控制参数,该控制策略能有效抑制系统低频振荡.文献[9]中分析含DFIG的风电系统可能会引起低频振荡的原因,对比基于复转矩系数法的4种控制策略,为开发最优控制策略以抑制DFIG系统在不同条件下的轴系振动提供了参考.文献[10]中提出一种有源-无源协调双通道功率调制阻尼控制器,该控制器可以较好地发挥DFIG转子侧控制器的阻尼控制能力.文献[11]中提出基于电力系统稳定器和功率振荡阻尼器的鲁棒协调控制策略改善低频振荡阻尼,该方法使用改进的基于特征值的目标函数实现,并用灰狼优化器进行优化.文献[12]中提出基于阻耗系数的附加阻尼模糊控制策略,通过控制转子侧换流器调节DFIG无功功率来增强系统阻尼,进而抑制系统低频振荡.文献[13]中提出一种基于主动抗扰控制的有功无功附加阻尼控制器,能起到很好的抑制负阻尼的作用.文献[14]中提出一种基于自抗扰控制器的广域阻尼控制器协调优化策略,采用人工蜂群算法对自抗扰控制器和广域阻尼控制器进行协调优化,提高系统阻尼水平.文献[15]中设计基于频率反馈的大规模柔性负荷控制策略和统一潮流控制器串联侧功率反馈附加控制策略,最后运用遗传算法优化协同控制参数,得到最优控制策略.文献[16]中分析有功功率环节和无功功率环节附加阻尼控制的差异,提出一种基于bang-bang调制的混合快速阻尼控制策略和基于二阶滑模的双馈风电机组鲁棒阻尼控制策略,对电力系统区间振荡有很好的抑制效果.文献[17]中利用状态反馈的方法将系统输入、输出作线性化处理,将非线性系统线性化,最后提出基于超螺旋算法的阻尼控制器,该控制方法不依赖于系统的详细建模参数,具有良好的工程应用价值.
综上所述,国内外学者针对电力系统区域间功率低频振荡已经进行了深入的研究,也提出大量的附加阻尼控制器设计方法.然而,大多数设计方案将系统中联络线功率或发电机功角偏差等参数作为输入,忽略系统平衡点变化后的动态特性对低频振荡的影响,在系统平衡点附近线性化的基础上设计类似于PSS结构的附加阻尼控制器,而很少有研究将DFIG自身转子电压和磁链的关系应用到阻尼控制器设计上.本文对DFIG的动态频率响应和转子励磁电压与磁链之间的关系进行研究,结合终端滑模变结构控制的思想,设计基于转子磁链偏差的快速终端滑模附加阻尼控制器,并证明该系统的收敛性和稳定性.该控制器将磁链的偏差作为输入,输出一个附加信号到转子侧功率控制环节,进而控制转子侧换流器,调节DFIG出力,抑制系统低频振荡现象.最后,通过仿真验证本文所提控制方法对系统低频功率振荡的影响.
1 DFIG响应阻尼调节能力分析
DFIG系统在三相静止坐标系中的模型阶是一个多变量、高阶次、强耦合、非线性的复杂时变系统.为了便于计算和控制,运用坐标变换将其转换到两相同步旋转d-q坐标系下进行分析[18].忽略定子绕组压降和电磁暂态变化过程,将定子电压定向于d轴上,DFIG定子输出有功功率(Ps)、无功功率(Qs)和转子磁链方程可表示为
式中:Ls、Lr、Lm分别代表定子自感、转子自感和定转子互感;ω1为同步转速;ψqs为d-q坐标系下定子q轴磁链分量;ψdr、ψqr分别为d-q坐标系下转子磁链分量.
式中:Rr为转子电阻;ωs=ω1-ωr为发电机转差角速度,其中ωr为发电机转子转速;udr、uqr分别为转子d-q轴电压分量;Ug为电网侧电压.
可以看出,DFIG转子磁通的大小取决于控制电压udr和uqr.另外,双馈风电场暂态功率的控制时间常数为τ=
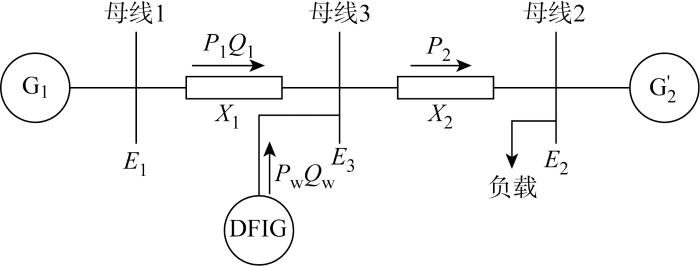
风电并入电网的两区域电力系统模型如图1所示.模型中包括同步发电机G1,电力系统G'2,母线2为参考母线.E1∠δ为G1的暂态电势,E2∠0°为母线2电压,E3∠δ-θ为母线3电压, 其中θ、δ分别为E1和E3、E2的相角差;X1、X2分别为线路1和线路2的电抗;P1、Q1分别为G1有功功率和无功功率;Pw、Qw分别为DFIG有功功率和无功功率;P2为线路2传输功率.当风电场并入电网时,系统的等价阻尼系数[19-20]为K'D=
图1
2 终端滑模附加控制器设计
由上述分析可知,调节DFIG输出有功功率可以提高系统的阻尼水平,因此可以通过调节DFIG的有功功率改善系统阻尼水平,进而抑制系统区域间的低频振荡.
2.1 系统滑模面与控制律设计
由式(2)可得,DFIG运行过程中,转子外加电压和转子磁链之间的关系如图2所示.图中:s为DFIG转差率.DFIG在发电状态时,将转子磁链分量ψdr、ψqr作为系统的受控输出,则转子励磁电压udr、uqr为系统的控制输入.为达到系统快速控制的目的,将终端滑模变结构控制方法运用到DFIG转子磁链控制方案之中,设计转子磁链控制器,使系统磁链跟踪期望磁链,确保系统在指定时间内迅速达到稳定状态.
图2
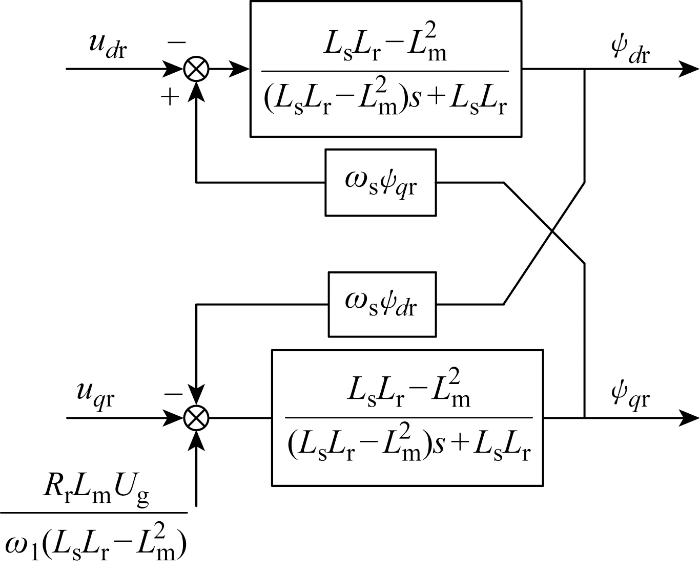
图2
DFIG转子外加电压与磁链之间的关系图
Fig.2
Relationship between applied voltage and flux linkage of DFIG rotor
假设转子d轴磁链期望值为
基于以上分析,设计如下滑模面:
式中:参数ρ1>0;p1、q1为正奇数,且0<q1/p1<1.
式(4)对时间求导得:
将式(3)代入式(5)得:
则转子d轴磁链采用的控制律可设计为
式中:udrep、udrn分别为等效控制律和切换控制律,且满足
式中:η'd=(1+μ(Sd)
综上所述,η'd可以迅速增大使控制器输出增大,从而使远离滑模面的系统状态快速向滑模面运动;当系统状态在做穿越滑模面运动时,η'd迅速减小,从而使系统状态快速稳定在指定的滑模面上.
2.2 系统收敛性与稳定性分析
(1) 系统收敛性证明.
证明 当Sd=0时,系统位于滑模面上,此时有
求解可得:
则DFIG的d轴磁链状态可在有限时间Δtd内快速收敛到0,证毕.
(2) 系统稳定性证明.
证明 取李雅普诺夫函数:
求导可得:
将式(6)代入式(12)可得:
所以V(t)≤0,系统在李雅普诺夫稳定性理论上全局渐进稳定,证毕.
同理可得转子q轴磁链控制律为
式中:参数ρ2>0;p2、q2为正奇数,且0<q2/p2<1.
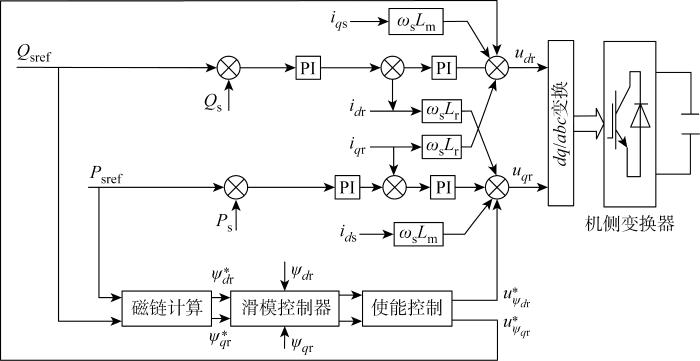
根据上述控制算法即可搭建如图3所示的机侧附加控制模型.图中:Psref、Qsref分别为有功功率和无功功率参考值,iqs、iqr、ids、idr分别为定转子q轴电流分量和d轴电流分量.根据功率参考值计算得到期望的转子磁链值,使之与实际转子磁链比较得到磁链误差值作为输入信号,通过滑模控制器输出控制信号
图3
系统中使能环节表达式如下:
3 系统离线仿真与分析
根据前文推导的快速终端滑模附加控制的原理设计附加阻尼控制器,在MATLAB/Simulink中建立如图4所示的四机两区域模型并进行仿真分析.图中:G2、G3和G4为同步发电机,L1、L2分别代表区域1和区域2负荷.
图4
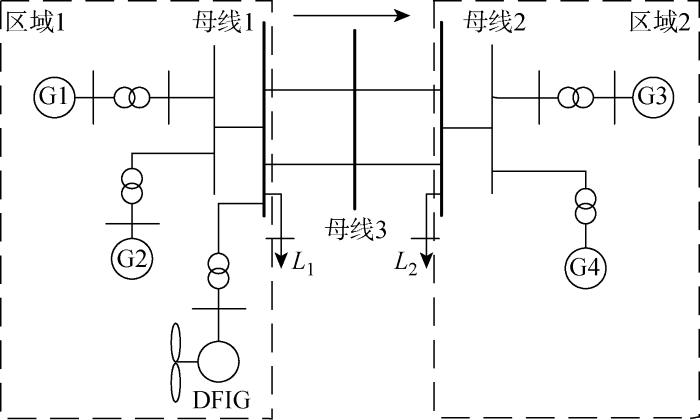
图4
含风电接入的四机两区域电力系统模型
Fig.4
A four-machine two-region power system model with wind power integration
假设系统中风力发电机的运行状态相同,采用单机等值模型,即采用100台1.5 MW的风力发电机代替,风电场通过10 km长的输电线接入四机两区域系统的母线1处,因此DFIG接入容量为150 MW.仿真系统中,用5台DFIG等值机模拟风电场群.其中,等值风力发电机定子电阻为
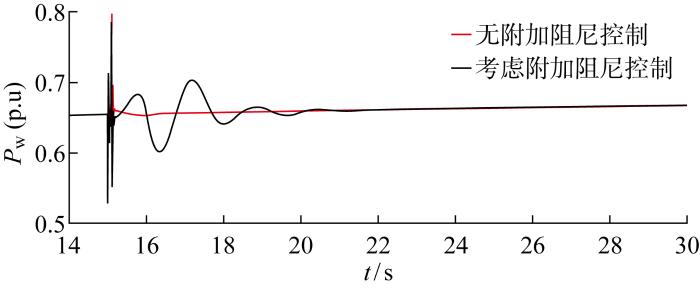
仿真环境设置:设t=15 s时,两区域联络线发生0.1 s的三相短路,此时系统由于阻尼不足,在联络线上发生功率振荡;t=15.1 s时故障消除,系统恢复正常运行状态.观察无附加阻尼控制下和本文提出的附加阻尼控制策略下系统中各项参数的响应曲线.
图5
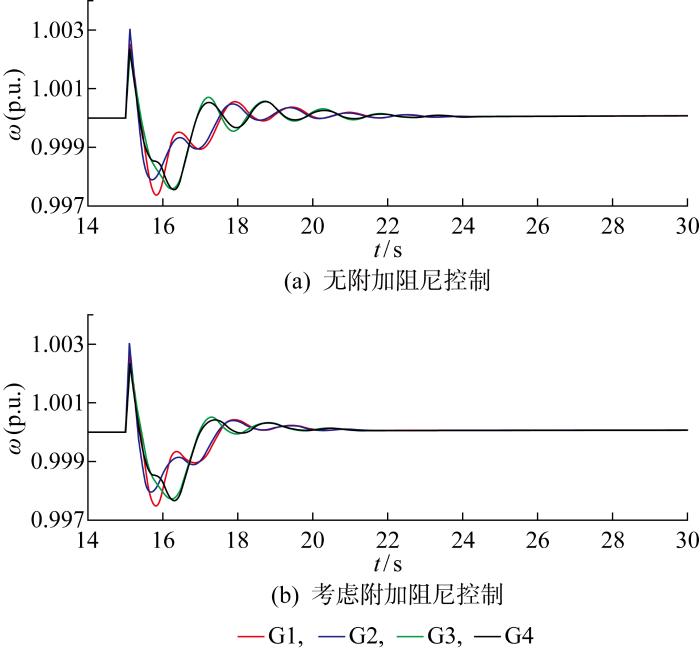
图6
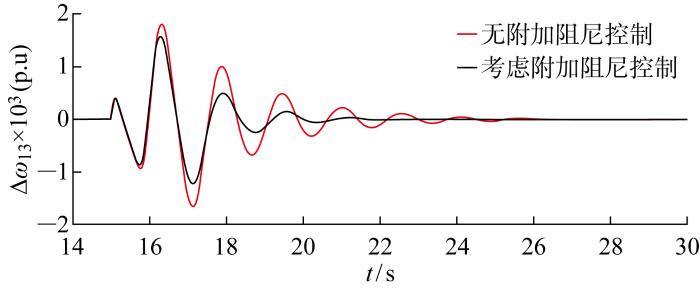
图6
同步发电机G1和G3转子角速度偏差振荡曲线
Fig.6
Angular velocity deviation oscillation mode of synchronous generator G1 and G3
图7为DFIG转子励磁电流(Ir)的变化曲线.对比图7(a)和7(b)可以看出,当系统发生低频振荡时,在有附加阻尼控制情况下,故障期间DFIG转子电流增大并有一段时间的振荡响应,使DFIG及时发出有功功率支撑电网;在没有附加阻尼控制情况下,故障期间DFIG转子电流变化较小,不能很好地响应系统振荡.图8为两区域联络线功率(P12)变化曲线,从图中可以看出在考虑了附加控制的情况下,联络线功率振荡的振幅明显减小,并且更快地趋于稳定.
图7
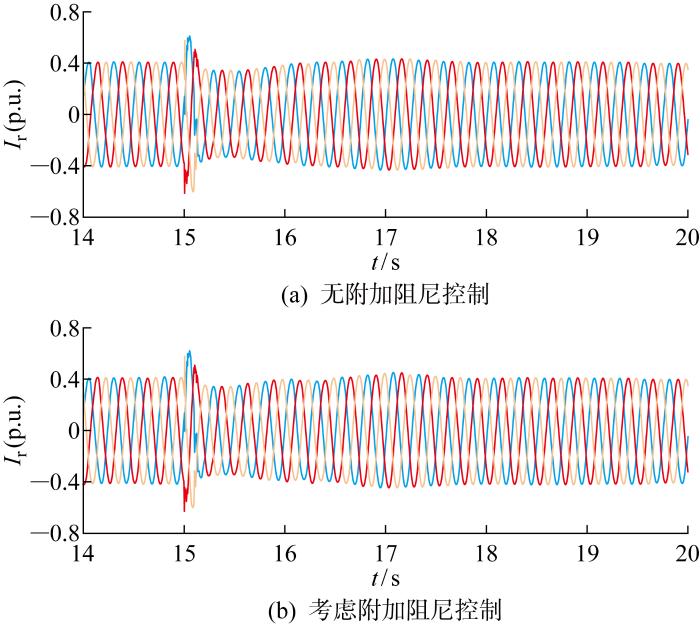
图8
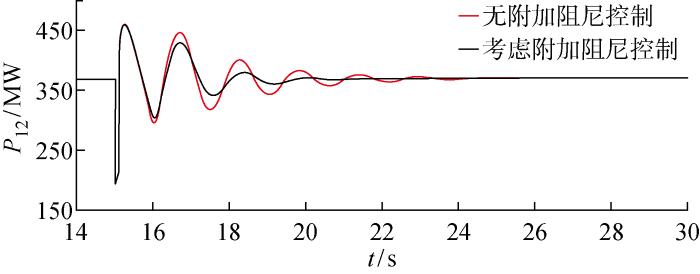
图9
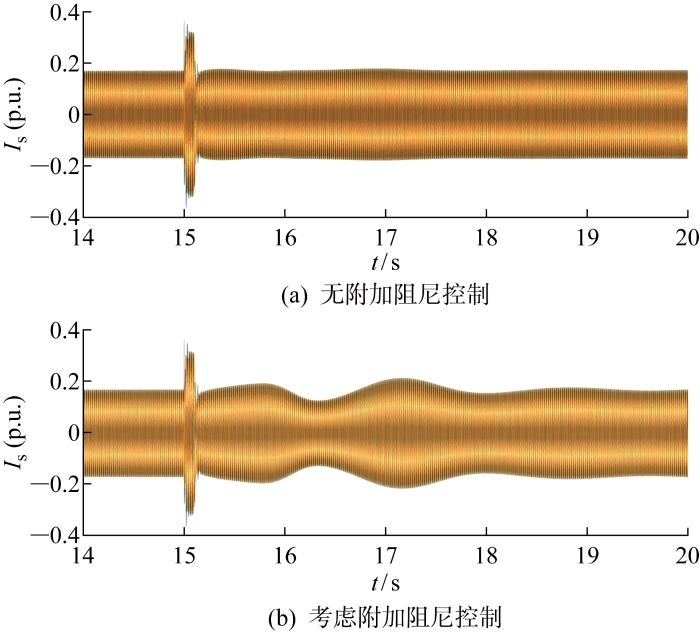
图10
4 系统实时仿真实验验证与分析
为了充分验证所提附加控制策略在工程应用上的可行性,开发基于RTDS的风电并网四机两区域实时仿真系统,主要仿真参数和离线仿真参数相同.
图11
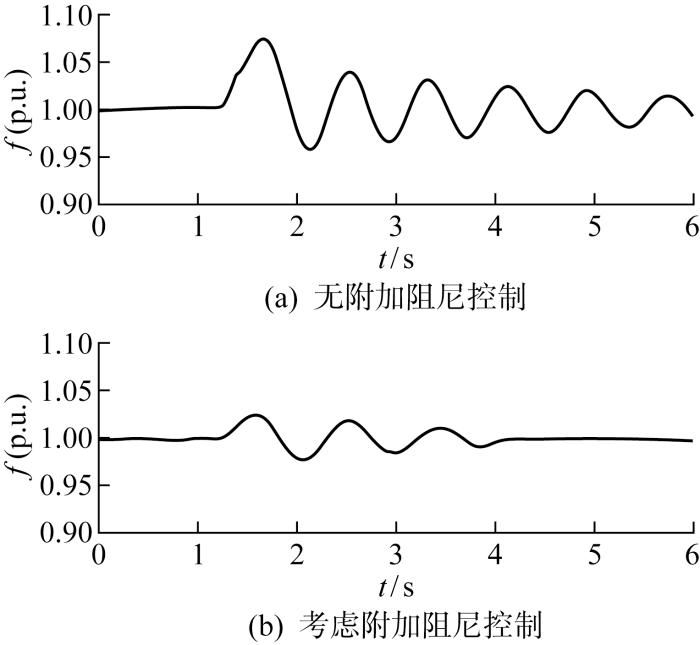
图12
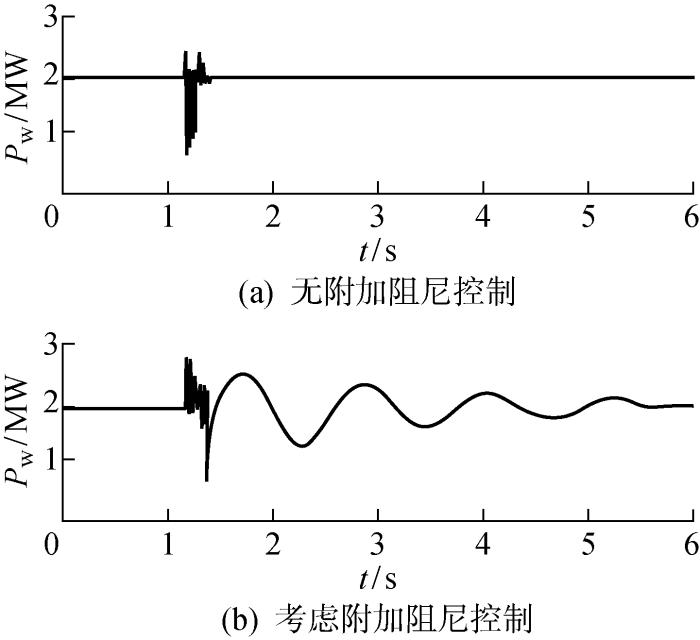
图13
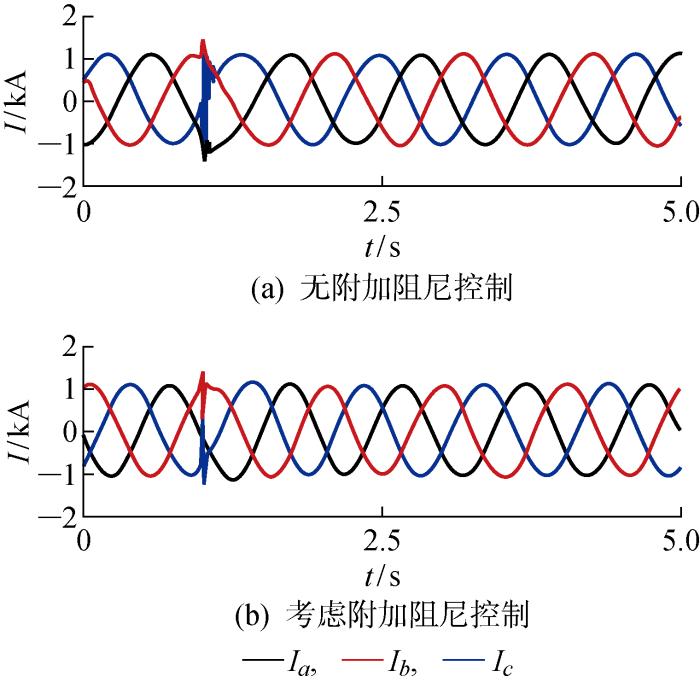
图14
5 结语
研究风电功率调节对系统低频振荡抑制问题,在DFIG的机侧电流控制环上引入以增加电力系统阻尼为目标、基于李雅普诺夫稳定性理论的快速终端滑模附加阻尼控制器.利用MATLAB仿真测试与实验验证,在电力系统出现低频振荡故障时,所提出的快速终端滑模控制不仅可以快速调节DFIG有功功率,提高系统的阻尼水平,有效抑制低频振荡;而且在系统响应过程中,风力发电机的有功功率响应速度快、变化平滑,定子电流振荡持续时间很短且振荡幅值在安全范围内,不会影响风电场安全运行,具有一定的应用参考价值.
参考文献
改善电力系统阻尼特性的双馈风电机组控制策略
[J].
A control strategy for increasing power system damping with wind turbine-driven doubly-fed induction generator
[J].
FACTS装置对含风电互联系统低频振荡特性分析
[J].
Analysis of FACTS device on low-frequency oscillation characteristics of a power system with wind farm integration
[J].
Subsynchronous interaction between direct-drive PMSG based wind farms and weak AC networks
[J].DOI:10.1109/TPWRS.2017.2682197 URL [本文引用: 1]
Wind in weak grids: Low-frequency oscillations, subsynchronous oscillations, and torsional interactions
[J].DOI:10.1109/TPWRS.59 URL [本文引用: 1]
Mixed-sensitivity robust control design for damping low-frequency oscillations with DFIG wind power generation
[J].DOI:10.1049/gtd2.v13.19 URL [本文引用: 1]
应用附加阻尼抑制风电接入后电网的低频振荡策略研究
[J].
Application of additional damping to suppress low-frequency oscillation strategy of the grid after wind power access
[J].
双馈风电机组抑制电力系统低频振荡的非线性控制策略
[J].
Nonlinear control strategy for doubly-fed wind turbines to suppress low-frequency oscillations in power systems
[J].
风电系统振荡模式对DFIG-PSS传递函数的灵敏度分析
[J].
Sensitivity analysis of the oscillation modes to the transfer function of DFIG-PSS in a wind power system
[J].
Control strategy for suppressing the shafting oscillation of the grid-connected DFIG-based wind power generation system
[J].
A coordinated dual-channel wide area damping control strategy for a doubly-fed induction generator used for suppressing inter-area oscillation
[J].
DOI:10.3390/app9112353
URL
[本文引用: 1]

Using a doubly-fed induction generator (DFIG), with an additional active or reactive damping controller, is a new method of suppressing the inter-area oscillation of a power system. However, using active power modulation (APM) may decrease the damping of the shaft oscillation mode of a DFIG and the system damping target cannot be achieved through reactive power modulation (RPM) in some cases. Either single APM or RPM does not consider system damping and torsional damping simultaneously. In this paper, an active-reactive coordinated dual-channel power modulation (DCPM) damping controller is proposed for DFIGs. First, considering the electromechanical parts and control structure of the wind turbine, an electromechanical transient model and an additional damping controller model of DFIGs are established. Then, the dynamic objective function for coordinating the parameters of the additional damping controller is proposed. The ratio between the active power channel and reactive power channel modulation is derived from the parameters optimized by the particle swarm optimization algorithm. Finally, the effectiveness and practicability of the designed strategy is verified by comparing it with a traditional, simple damping controller design strategy. Standard simulation system examples are used in the comparison. Results show that the DCPM is better at maximizing the damping control capability of the rotor-side controller of a DFIG and simultaneously minimizing adverse effects on torsional damping than the traditional strategy.
Robust coordinated control for damping low frequency oscillations in high wind penetration power system
[J].DOI:10.1002/etep.v29.5 URL [本文引用: 1]
Active-reactive additional damping control of a doubly-fed induction generator based on active disturbance rejection control
[J].DOI:10.3390/en11051314 URL [本文引用: 1]
含双馈风电机组系统的广域阻尼控制器协调优化策略
[J].
Coordinated optimal strategy of wide-area damping controller in doubly-fed wind turbine system
[J].
基于柔性负荷及UPFC的低频振荡抑制策略
[J].
Low-frequency oscillation suppression method based on flexible load and UPFC
[J].
双馈风电场损耗最小化的有功无功协调优化控制
[J].
Coordinated optimal control with loss minimization for active and reactive power of doubly fed induction generator-based wind farm
[J].
基于广域测量信号的双馈风电机组阻尼控制策略
[J].
WAMS-based damping control strategy of doubly-fed induction generator
[J].
基于双滑模的永磁同步电机直接转矩控制
[J].
Research on direct torque control for permanent magnet synchronous motor based on the double sliding mode
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}