基于动态运动原语和自适应控制的机器人技能学习
Robot Skill Learning Based on Dynamic Motion Primitives and Adaptive Control
基于动态运动原语和自适应控制的机器人技能学习 |
| 张文安, 高伟展, 刘安东 |
|
Robot Skill Learning Based on Dynamic Motion Primitives and Adaptive Control |
| ZHANG Wenan, GAO Weizhan, LIU Andong |
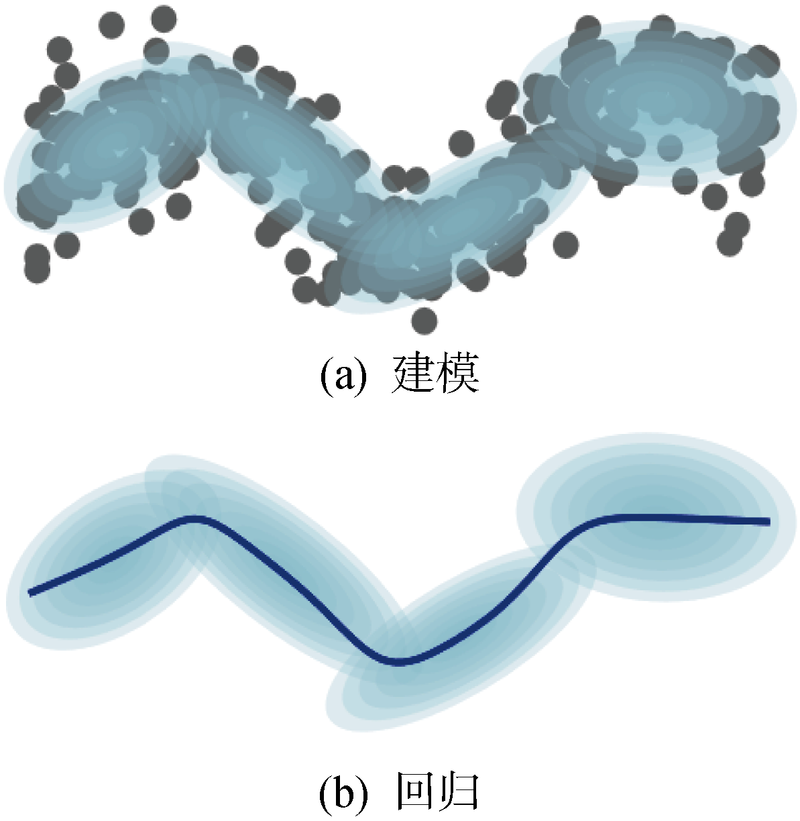
| 图3 使用GMM和GMR对DMP的强迫项进行建模和回归 |
| Fig.3 Modeling and regression of DMP forcing terms by GMM and GMR |
|
|