基于反步法的多移载工装协同作业编队控制策略
Formation Control Strategy of Multiple Mobile Robots Cooperative Operation Based on Backstepping Method
基于反步法的多移载工装协同作业编队控制策略 |
| 刘禹铭, 赵勇, 董正建, 王平, 姬煜琦 |
|
Formation Control Strategy of Multiple Mobile Robots Cooperative Operation Based on Backstepping Method |
| LIU Yuming, ZHAO Yong, DONG Zhengjian, WANG Ping, JI Yuqi |
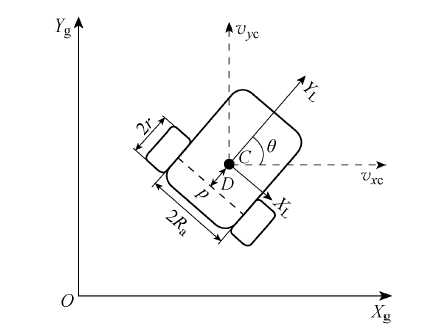
| 图6 移载工装简化的运动学模型示意图 |
| Fig.6 Schematic of simplified kinematic model of transfer tooling |
|
|