基于预设性能制导律的欠驱动AUV海底地形鲁棒时滞跟踪控制
Robust Seabed Terrain Following Control of Underactuated AUV with Prescribed Performance Guidance Law Under Time Delay of Actuator
基于预设性能制导律的欠驱动AUV海底地形鲁棒时滞跟踪控制 |
| 李锦江, 向先波, 刘传, 杨少龙 |
|
Robust Seabed Terrain Following Control of Underactuated AUV with Prescribed Performance Guidance Law Under Time Delay of Actuator |
| LI Jinjiang, XIANG Xianbo, LIU Chuan, YANG Shaolong |
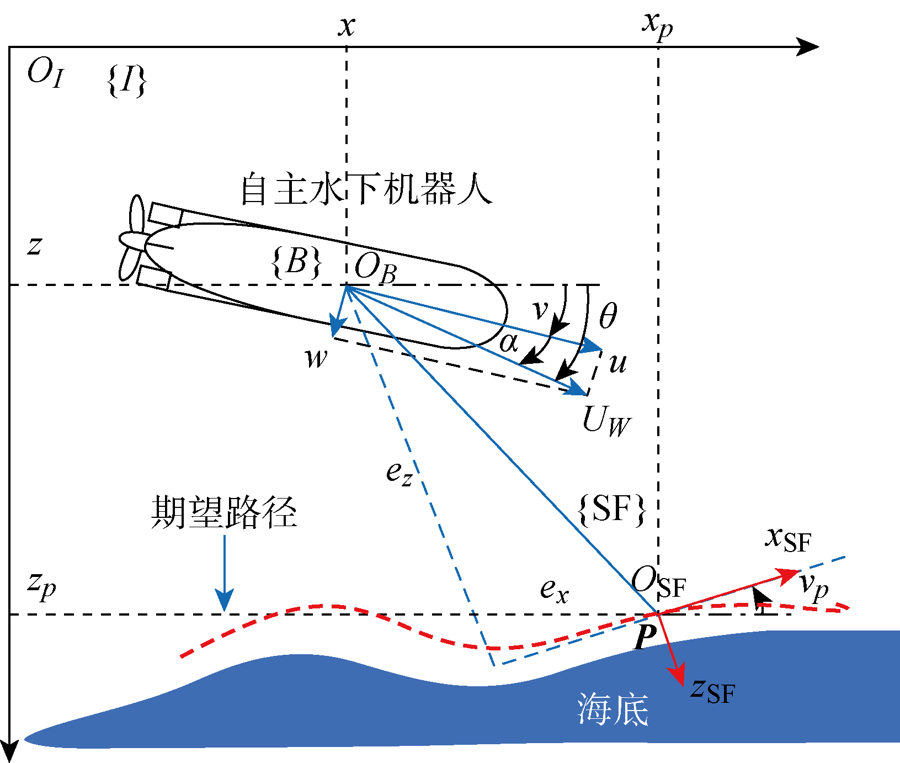
| 图1 自主水下机器人起伏地形跟踪示意图 |
| Fig.1 Uneven seabed terrain following of the AUV |
|
|