基于扰动块的柔性臂分布式滚动时域估计
Disturbance-Blocking-Based Distributed Receding Horizon Estimation of Flexible Joint Robots
基于扰动块的柔性臂分布式滚动时域估计 |
| 徐晨辉, 俞芳慧, 何德峰 |
|
Disturbance-Blocking-Based Distributed Receding Horizon Estimation of Flexible Joint Robots |
| XU Chenhui, YU Fanghui, HE Defeng |
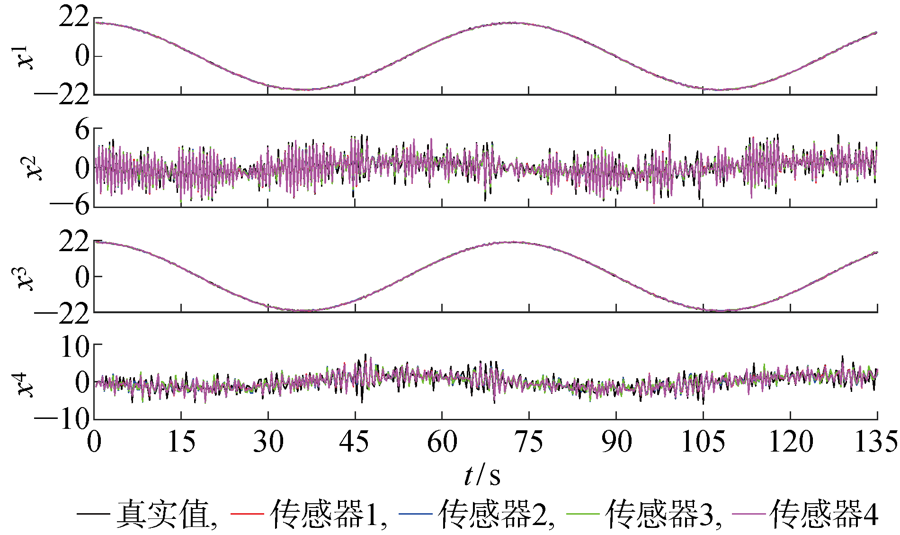
| 图5 状态轨迹估计 |
| Fig.5 Estimates of state trajectory |
|
|