双并联机构耦合连续体机械臂的设计与实现
Design and Realization of Continuum Manipulator Based on Coupling of Double Parallel Mechanism
双并联机构耦合连续体机械臂的设计与实现 |
| 吴灌伦, 施光林 |
|
Design and Realization of Continuum Manipulator Based on Coupling of Double Parallel Mechanism |
| WU Guanlun, SHI Guanglin |
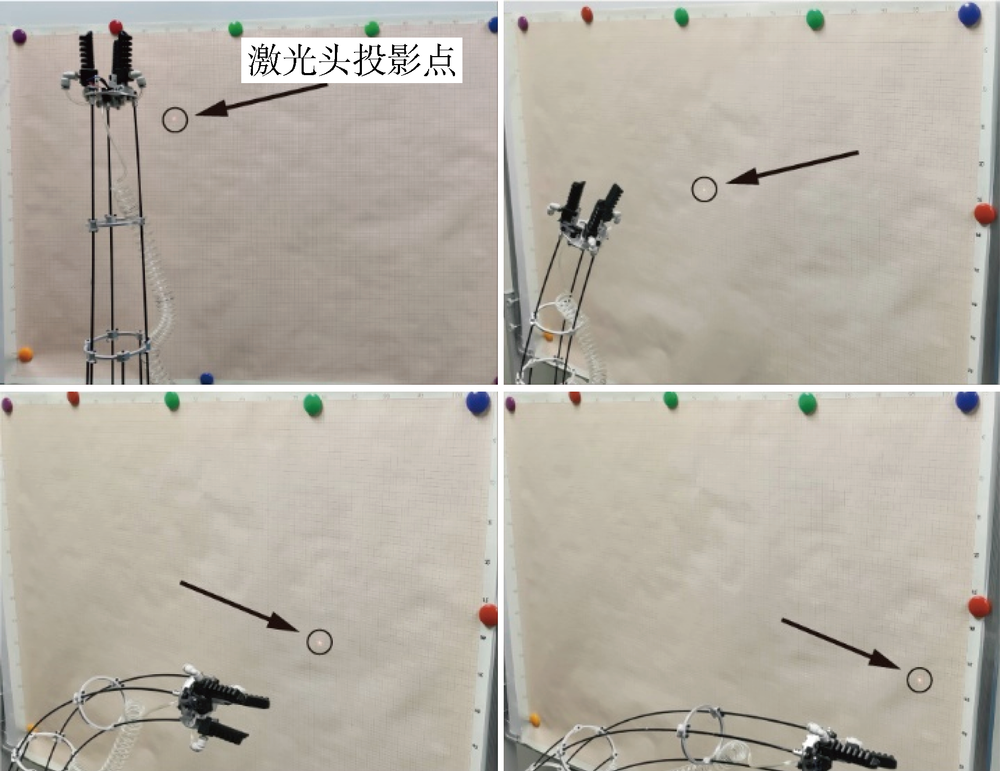
| 图9 由机械臂标记点测量平面定位误差 |
| Fig.9 Planar error experiment measured by marker fixed on end-effector |
|
|