驾驶机器人转向操纵的动态模型预测控制方法
Dynamic Model Predictive Control Method for Steering Control of Driving Robot
驾驶机器人转向操纵的动态模型预测控制方法 |
| 姜俊豪, 陈刚 |
|
Dynamic Model Predictive Control Method for Steering Control of Driving Robot |
| JIANG Junhao, CHEN Gang |
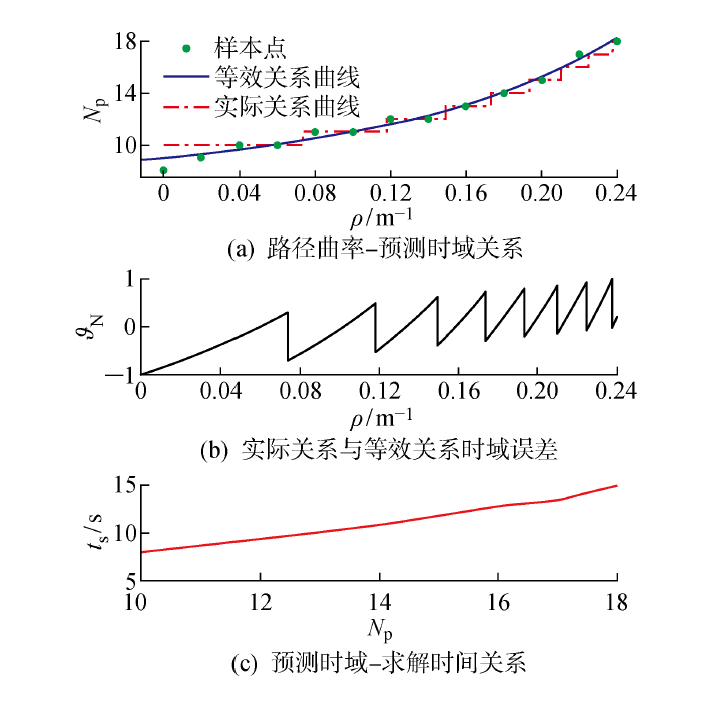
| 图6 预测时域调整方法结果 |
| Fig.6 Results of prediction horizon adjustment method |
|
|