基于增益自适应超螺旋滑模理论的无人机控制
Control of Unmanned Aerial Vehicle Based on Gain Adaptive Super-Twisting Sliding Mode Theory
基于增益自适应超螺旋滑模理论的无人机控制 |
| 周齐贤, 王寅, 孙学安 |
|
Control of Unmanned Aerial Vehicle Based on Gain Adaptive Super-Twisting Sliding Mode Theory |
| ZHOU Qixian, WANG Yin, SUN Xuean |
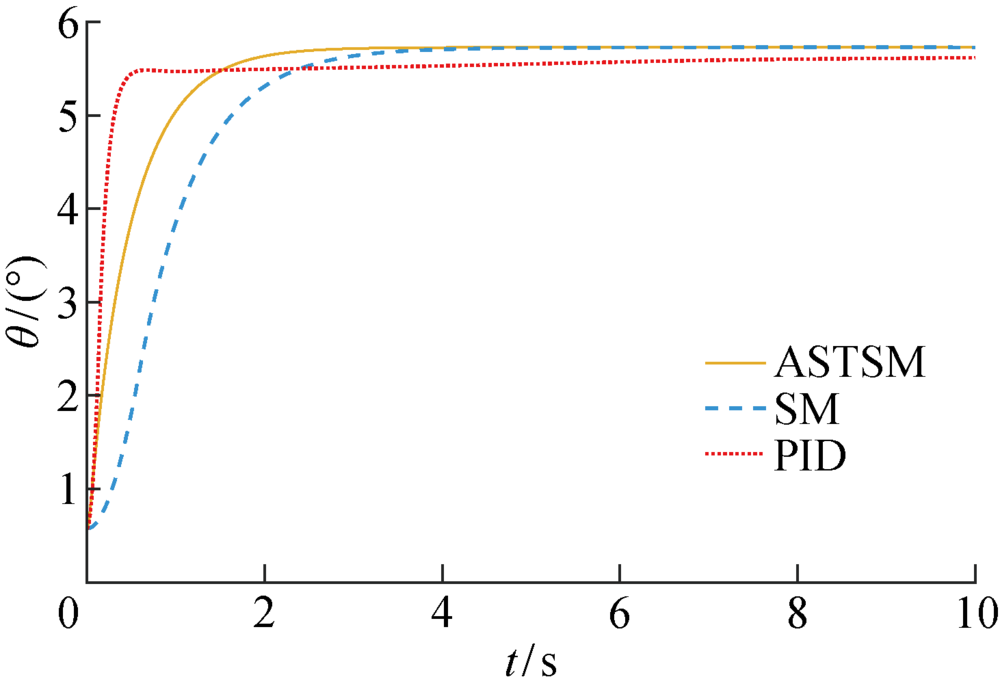
| 图14 俯仰角跟踪曲线(扰动) |
| Fig.14 Tracking curves of pitch angles with disturbance |
|
|