具有多地形运动能力的双模块软体机器人
Dual Modular Soft Robot with Multi-Terrain Movement Ability
具有多地形运动能力的双模块软体机器人 |
| 王宇轩, 刘朝雨, 王江北, 费燕琼 |
|
Dual Modular Soft Robot with Multi-Terrain Movement Ability |
| WANG Yuxuan, LIU Zhaoyu, WANG Jiangbei, FEI Yanqiong |
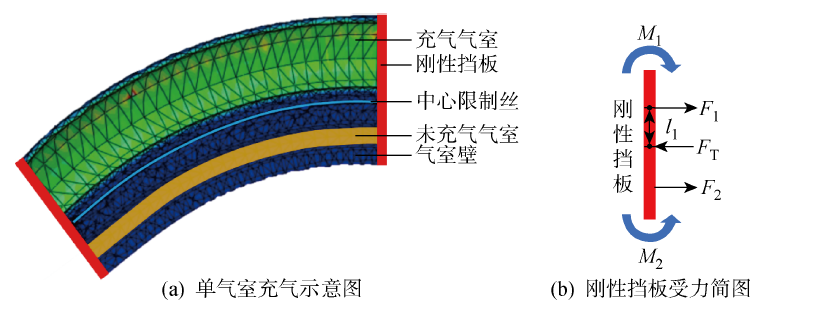
| 图3 弯曲力矩来源示意图 |
| Fig.3 Schematic diagram of source of bending moment |
|
|