基于全局特征描述子的激光SLAM回环检测方法
Loop Closure Detection Method of Laser SLAM Based on Global Feature Descriptor
基于全局特征描述子的激光SLAM回环检测方法 |
| 韩超, 陈敏, 黄宇昊, 赵明辉, 杜乾坤, 梁庆华 |
|
Loop Closure Detection Method of Laser SLAM Based on Global Feature Descriptor |
| HAN Chao, CHEN Min, HUANG Yuhao, ZHAO Minghui, DU Qiankun, LIANG Qinhua |
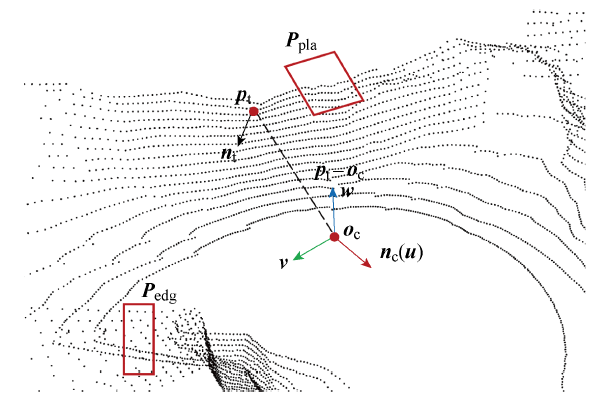
| 图2 全局点云下的uvw坐标系 |
| Fig.2 uvw coordinate system of global point cloud |
|
|