

针对双馈感应风力发电机因无法响应系统频率变化而不能参与系统的调频的问题,国内外专家提出了大量控制策略与改进方案.文献[9,10]在MPPT运行基础上增加了虚拟惯性和下垂控制,参与系统的频率调节,然而不同风速下,机组调频能力不同,采用传统定系数控制方法的调频效果较差.为了适应风速的变化,文献[11]采用试错法分析不同虚拟惯量及下垂系数的调频效果选择最优参数,与超速控制结合实现一次调频功能.但试错法得到的优化参数具有一定片面性,同时定减载率可能过分牺牲风能或造成有功备用不足.而且在频率变化不同阶段调频系数也发挥不同的作用,因此在适应风速变化的同时还需适应频率的变化.文献[12,13,14,15]通过分析虚拟惯量在频率变化不同阶段的作用,从而自适应改变虚拟惯量系数的大小,然而其应用对象为虚拟同步机,并未考虑系统实际情况确定控制参数优化.文献[16]在频率下降及上升阶段改变虚拟惯量的大小,同时引入超级电容器作为备用功率,进行下垂控制参与一次调频.然而并未确定具体控制策略及调频参数,且由于技术成熟度和产业规模的影响,目前储能系统的成本很高,实现困难.
本文通过频率变化率及偏差将频率动态响应划分不同阶段,分析虚拟惯量及下垂系数在各阶段与频率稳定性的关系,从而实现对虚拟惯量及下垂系数的协同自适应控制.此外,基于极限学习机在不同等级风速下预测各项调频指标,建立了调频指标的目标函数对综合自适应调频控制参数寻优,并提出了风机在超速减载控制下的最优减载率控制方案,即提供稳态频率调节所需持续有功备用.最后在MATLAB/Simulink中建立两区四机风机并网模型,仿真结果表明采用综合自适应控制能有效提高电力系统频率稳定性.
1 双馈感应风力发电机运行特性
双馈感应风力发电机转子的质量远大于同步发电机转子的质量,且具备变速恒频运行能力,故其中存储了大量旋转动能,在频率扰动初期可快速提供惯量支撑.其存储的动能的大小为
式中:J为风力机和发电机的等效转动惯量;ω为转子转速.
定义双馈感应风力发电机的惯性时间常数H为额定转速下转子动能与额定容量的比值,即
式中:ωn为额定角速度;Sn为额定容量.
设双馈感应风力发电机初始转速为ω0,t时刻的转速为ω(t),则转子释放动能表达式为
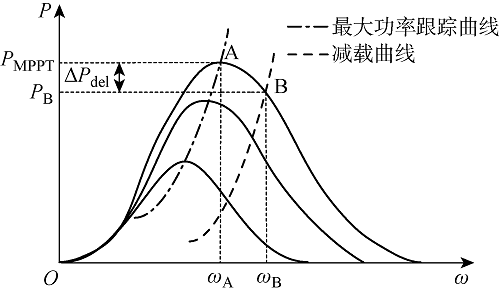
式中:PMPPT为风机采用MPPT控制时的输出功率;de为超速减载控制的减载率.
图1
为使风机参与电网暂稳态频率调整,可在MPPT控制运行的基础上加入采用比例微分控制的有功增量[9].其表达式如下:
式中:Kd为虚拟惯量系数;df/dt为频率变化率;Kp为下垂系数;Δf为系统频率偏差.
2 综合自适应控制策略
由上述分析可知,比例微分系数决定了机组有功增量大小.但受风速的影响,风机转速不断变化,若采用较大的控制系数易导致机组失稳,而较小的控制系数则不能充分发挥机组的调频能力,因此固定调频系数无法较好地适应风速的变化.而且为进一步改善系统频率稳定,在频率动态变化的不同阶段比例微分系数取值也应不同.综上所述,对DFIG调频控制系数Kd和Kp的整定需要进一步深入研究.
2.1 基于风速的自适应控制
双馈感应风力发电机的转速会随风速不断改变,而风速具有不确定性,因此在频率波动时风机能提供的调频能量会有所不同.所以应当在不同风速下,考虑风机可参与系统调频程度自适应改变虚拟惯量及下垂系数的大小,以此来适应风速的变化.即在高风速时设置较大的调频系数,承担相应的调频任务,而在低风速时,调频系数不宜设置过大,应保证风机自身的安全稳定运行[11].风机的虚拟惯量系数Kd和下垂系数Kp受到风速的约束,可表达为
式中:F1(v)、F2(v)均为风速v的函数.
2.2 综合自适应控制策略
当系统出现功率扰动后,发电功率与负荷功率不平衡会导致系统的频率的偏离,以负荷突增为例,频率及频率变化率动态变化过程如图2所示.
图2
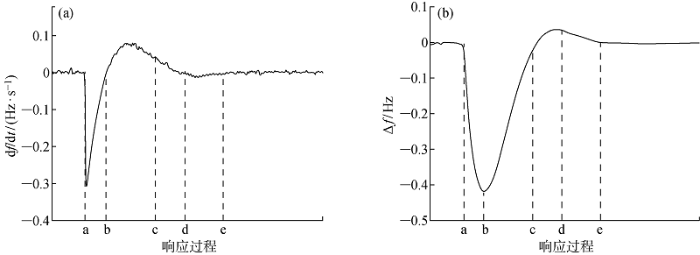
图2
频率偏差及频率变化率曲线
Fig.2
Curves of frequency deviation and rate of change of frequency
根据系统频率及频率变化率的正负可以将频率的动态响应过程划分为4个阶段(a-b,b-c,c-d,d-e),DFIG虚拟惯量系数Kd及下垂系数Kp的值应在各阶段自适应调节,从而改善系统频率稳定性,每个阶段系统频率及其变化率的状态如表1所示.
表1 频率偏差及频率变化率
Tab.1
| 区间 | Δf | df/dt | 符号 | 阶段 |
|---|---|---|---|---|
| a-b | <0 | <0 | 同号 | 偏离 |
| b-c | <0 | >0 | 异号 | 恢复 |
| c-d | >0 | >0 | 同号 | 偏离 |
| d-e | >0 | <0 | 异号 | 恢复 |
根据频率偏差及频率变化率是否同号可以将4个阶段分为偏离阶段和恢复阶段.在频率动态响应初期阶段(a-b),频率偏差和频率变化率同号均为负值,频率快速下降为偏离阶段,系统频率偏离稳态值在b点达到最大频率偏差,而虚拟惯量控制通过响应系统频率变化率可以短时提供较大功率支撑,增大系统的等效惯量.由式(5)可知虚拟惯量系数Kd与系统频率变化率成反比关系,所以在这一阶段需要增大Kd阻止系统频率的快速下降,防止产生过大系统频率偏差触发低频减载.同理,在频率响应c-d阶段,频率偏差和频率变化率同号均为正值,需要增大Kd.
在频率动态响应b-c阶段,频率偏差和频率变化率异号,这一阶段系统频率偏差Δf趋向于0,频率趋向于稳态值,如增加Kd,会减慢频率的恢复速度,不利于频率快速稳定,则应当减小Kd,使系统频率尽可能快地恢复到稳态值.同理,在频率响应d-e阶段,频率偏差和频率变化率异号,频率趋向于稳态值,需要减小Kd.
基于上述分析可实现DFIG虚拟惯量系数Kd的自适应控制算法,即由频率偏差和频率变化率共同决定Kd的大小:当两者同号时频率处于偏离阶段,应当增大虚拟惯量值的大小,当两者异号应当减小虚拟惯量值的大小.其表达式为
式中:Kd0为虚拟惯量系数稳态值;k1为虚拟惯量调节系数;M为频率变化率的阈值,目的是滤除
在频率动态响应的各个阶段,虚拟惯量系数Kd和下垂系数Kp对频率稳定性分别起到不同的作用[5].在频率变化初期,虚拟惯量控制能对频率变化率快速响应提供有功支撑,减小频率偏差及频率变化率,但频率趋于稳定的调整时间随之增加.随着Kp的增加,频率的偏移峰值随之降低,但使系统到达峰值的速度更快,即加快了a-c阶段系统频率的变化.当频率达到稳态时,虚拟惯量控制不再起作用,而由下垂控制起主要作用.对式(5)进行变化可得:
当系统频率达到稳态时,下垂系数决定系统的稳态频率偏差,该值越大则稳态频率偏差越小,同时影响频率趋于稳定的时间.因此在系统频率趋向稳态或处于稳态时,应增大Kp,从而减小系统频率的稳态偏差,加快频率的恢复速度.
因此,为进一步改善系统频率的动态响应,由频率偏差和频率变化率共同决定Kp,即当两者异号时,频率处于恢复阶段,应增大Kp值,其表达式为
式中:Kp0为下垂系数稳态值;k2为下垂控制调节系数.
3 基于极限学习机的控制参数优化
由上述分析可知,本文提出的综合自适应控制策略考虑了风速及频率动态响应过程的影响,使得DFIG调频控制参数能适应风速及频率变化并主动参与系统的频率支撑.此外,还需根据调频效果及机组运行状态对表达式中各参数进行优化,考虑的调频效果指标包括:频率最大偏差Δfmax、频率稳态偏差Δfste及频率恢复时间Δtste.同时,还需考虑DFIG自身的运行状态指标.首先在调频过程中,风机的转速并不能持续的下降或上升,且变化范围不超过0.33 p.u.,否则会造成系统频率的二次跌落.其次,还需考虑转速恢复时间,即当转速达到最低点后应尽快恢复至稳态以保证机组自身的稳定运行.基于以上评估指标可对综合自适应控制中的调频参数进行优化.由于调频参数与各项评估指标之间为复杂的非线性关系,数据量庞大,因此考虑基于极限学习机(Extreme Learning Machine, ELM)对综合自适应调频参数进行优化.
3.1 极限学习机模型
图3
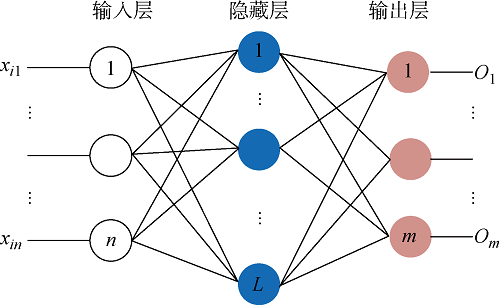
那么,具有L个隐藏层的ELM输出为
式中:g(·)为神经元激活函数,本文取Sigmoid函数;wi=[wi1wi2 … win]为输入权值向量;β=[β1β2 … βL]T为输出权值向量;bj为输入层和隐含层之间的偏置值.由式(10)可以得到一个矩阵形式的方程:
Hβ=Y
Y=[y1y2 … ym]T
H=
为求得在训练集上最优效果的β,就需使其训练误差达到最小.即β可以由式(11)的极小2范数最小二乘解获得:
式中:H†为H的穆尔-彭罗斯广义逆矩阵.
3.2 基于极限学习机的调频参数优化
本文根据DFIG调节效果及自身运行状态来确定综合自适应控制调频参数的取值,基于上述分析考虑的评估指标包括:频率最大偏差Δfmax,频率稳态偏差Δfste及频率恢复时间Δtste、转速最大偏差Δωmin及转速恢复时间Δtω.在不同风速下使用ELM精确预测各项评估指标,并建立目标函数进行寻优,即可得到对应的最优调频参数.极限学习机优化调频参数流程图如图4所示.
图4
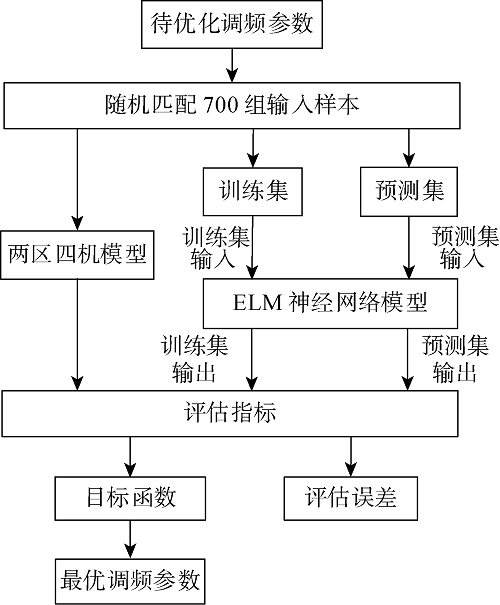
图5
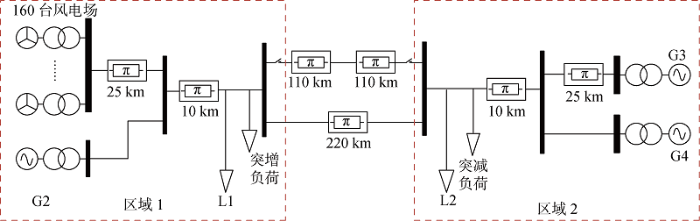
图5
两区四机风机并网模型
Fig.5
Four-machine two-area system with doubly fed induction generators
表2 不同风速下调频参数取值范围
Tab.2
| v/(m·s-1) | Kp0 | Kd0 | k1 | k2 |
|---|---|---|---|---|
| 8 | 0~20 | 0~5 | 0~70 | 0~70 |
| 10 | 0~40 | 0~10 | 0~70 | 0~70 |
| 12 | 0~50 | 0~20 | 0~70 | 0~70 |
表3 不同风速下评估指标预测误差
Tab.3
| v/ (m·s-1) | Δfmax/ Hz | Δfste/ Hz | Δωmin (p.u.) | Δtste/s | Δtω/s |
|---|---|---|---|---|---|
| 8 | 0.013 | 0.027 | 0.019 | 0.17 | 0.34 |
| 10 | 0.029 | 0.035 | 0.022 | 0.24 | 0.46 |
| 12 | 0.035 | 0.028 | 0.013 | 0.32 | 0.35 |
为了兼顾风机调频效果和稳定运行,根据各项指标的相对重要性赋予对应的权重,然后对各项指标进行加权求和建立目标函数,待优化的目标函数的表达式为
约束条件为调频时机组转速允许的变化范围:
最后在DFIG转速约束下对输出评估指标寻优,在形成的目标函数中F的值最小时,即为基于加权求和的评估指标整体最优解, 其对应输入参数的即为最优调频参数.最终得到高低中3种不同等级风速下的DFIG最优调频参数如表4所示.
表4 不同风速下最优调频参数
Tab.4
| v/(m·s-1) | Kp0 | Kd0 | k1 | k2 |
|---|---|---|---|---|
| 8 | 12 | 0 | 25 | 25 |
| 10 | 25 | 4 | 45 | 49 |
| 12 | 40 | 5 | 63 | 49 |
为使风机充分利用风能资源,在满足调频能力的同时减少有功控制成本, 使减载备用功率与下垂控制参与稳态调频所需有功功率平衡,将不同风速下的最优自适应参数及对应的稳态频率偏差代入式(6),可得风机参与稳态调频所需提供的持续有功支撑即为超速减载备用,再结合式(5)和(9)可得不同风速下DFIG最优减载系数表达式为
4 仿真验证
4.1 恒定风速下的仿真结果分析
图6
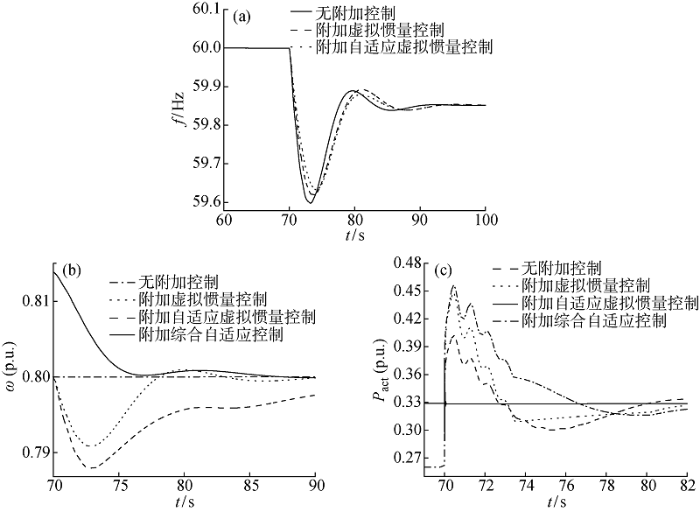
图6
不同控制策略调频效果对比
Fig.6
Comparison of frequency regualtion effects of different control strategies
由图6可知,当系统发生功率扰动后,风电机组在未附加功率控制时,因其机械和电磁控制解耦,不响应系统频率变化提供功率支撑,其转子转速不发生变化.在恒定虚拟惯量系数控制下,风机转速下降释放转子动能,频率最大偏差减小,但恢复阶段频率恢复速度较慢,且风机转速出现二次波动.在自适应虚拟惯量控制下,偏离阶段虚拟惯量系数增大,从而提供更多转子旋转动能,DFIG转子转速下降程度加大,但转速仍能恢复且未出现二次波动,频率最大偏差进一步减小;在恢复阶段虚拟惯量系数减小,减小虚拟惯量附加功率的阻碍作用,加快了频率恢复速度.而加入综合自适应控制后,风机运行在超速减载模式下初始转速高于最大功率追踪下的初始转速,从而在暂态阶段提供更多的转子旋转动能,并留有一定有功备用.加入下垂系数控制进一步降低最大频率偏差,当系统达到稳态,增大下垂系数,充分利用预留备用减载功率提供持续有功功率支撑,有效减小了稳态频率偏差.
综合自适应控制下的虚拟惯量和下垂系数的变化情况如图7所示.分析可知,虚拟惯量系数和下垂系数分别参与频率的暂态和稳态恢复阶段,有效提高了系统频率稳定性.
图7
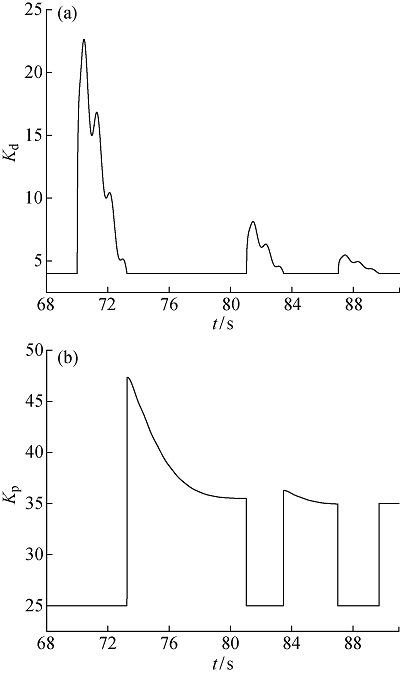
图7
虚拟惯量及下垂系数变化曲线
Fig.7
Curves of virtual inertia and droop coefficient variation
为验证所提控制策略在负荷突减情况下的有效性,设置负荷Ld在运行到10 s时突减100 MW.对比无附加控制、传统虚拟惯量控制、虚拟惯量自适应控制和综合自适应控制时系统频率的变化,如图8所示.由图可知,负荷突减时,自适应虚拟惯量控制下的频率最大偏差减小,同时加快频率恢复速度.综合自适应控制下利用减载功率有效减小了稳态频率偏差.
图8
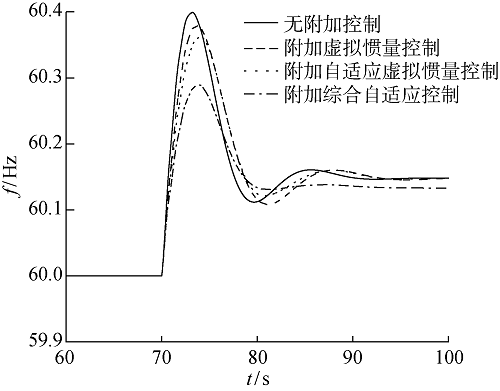
图8
负荷突减时不同控制方式下频率变化曲线
Fig.8
Curves of frequency variation in different control modes in case of sudden load reduction
4.2 随机风速下的仿真结果分析
图9
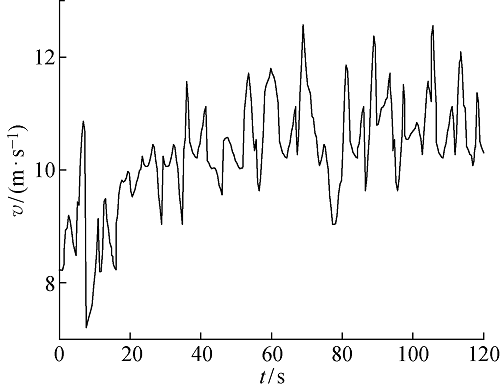
图10

由图10可知,在随机风速下发生功率扰动时本文所提综合自适应控制策略,以及基于极限学习机优化后的调频参数,能够充分利用双馈感应风力发电机转子旋转动能及减载备用功率提供暂稳态有功支撑,有效减小在频率动态响应过程中的频率偏差,加快频率恢复速度,有利于系统频率的快速稳定,提高了DFIG的调频能力.
5 结语
本文在对双馈感应风力发电机调频控制机理分析的基础上,提出频率动态响应的不同阶段确定双馈感应风力发电机的虚拟惯量系数和下垂控制系数的自适应方法,同时基于极限学习机提出了双馈感应风力发电机综合自适应调频参数优化方法.通过理论分析与仿真验证,结果表明:在风速变化不大或者随机风速情况下,本文方法能够确定最优综合自适应控制参数,并且根据稳态频率偏差确定风机在超速减载控制下的最优减载率,提高了双馈感应风力发电机的调频能力.
参考文献
大规模风电参与系统频率调整的技术展望
[J].
Prospect of technology for large scale wind farm participating into power grid frequency regulation
[J].
大型风电机组惯量控制研究现状与展望
[J].
Research status and prospect of inertia control for large scale wind turbines
[J].
大电网中虚拟同步发电机惯量支撑与一次调频功能定位辨析
[J].
Analysis of inertia support and primary frequency modulation function positioning of virtual synchronous generators in large power grids
[J].
Spatial assessment of wind power potential at global scale A geographical approach
[J].DOI:10.1016/j.jclepro.2018.07.288 URL [本文引用: 1]
风力发电对系统频率影响及虚拟惯量综合控制
[J].
Impact of wind power on power system frequency and combined virtual inertia control
[J].
Releasable kinetic energy-based inertial control of a DFIG wind power plant
[J].DOI:10.1109/TSTE.2015.2493165 URL [本文引用: 1]
虚拟同步发电机技术在风发电系统中的应用与展望
[J].
Application and prospect of virtual synchronous generator technology in wind power generation system
[J].
基于虚拟惯量和频率下垂控制的双馈风电机组一次调频策略
[J].
Primary frequency regulation strategy of DFIG based on virtual inertia and frequency droop control
[J].
风电机组虚拟惯量控制的响应特性及机理分析
[J].
Response characteristics and mechanism analysis about virtual inertia control of wind generators
[J].
基于可变系数的双馈风机虚拟惯量与超速控制协调的风光柴微电网频率调节技术
[J].
Wind-solar diesel microgrid frequency adjustment technology based on variable coefficient-based virtual inertia and overspeed control of doubly-fed wind turbines
[J].
A self-adaptive inertia and damping combination control of VSG to support frequency stability
[J].DOI:10.1109/TEC.2016.2623982 URL [本文引用: 3]
基于自适应旋转惯量的虚拟同步发电机控制策略
[J].
Control strategy of virtual synchronous generator based on adaptive rotational inertia
[J].
基于改进型RBF神经网络的VSG转动惯量自适应控制
[J].
Adaptive control of VSG moment of inertia based on improved RBF neural network
[J].
基于双馈风力发电场虚拟惯量控制策略优化
[J].
Optimization of virtual inertia control strategy for doubly-fed wind farms
[J].
双馈风电机组变系数虚拟惯量优化控制
[J].
Variable coefficient virtual inertia optimal control for doubly-fed wind turbines
[J].
Semi-supervised and unsupervised extreme learning mchines
[J].DOI:10.1109/TCYB.2014.2307349 URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}