上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (11): 1753-1761.doi: 10.16183/j.cnki.jsjtu.2024.187
所属专题: 制导、导航与控制
张威振, 何真( ), 汤张帆
), 汤张帆
收稿日期:2024-05-24
修回日期:2024-06-12
接受日期:2024-06-19
出版日期:2024-11-28
发布日期:2024-12-02
通讯作者:
何 真,副教授;E-mail:作者简介:张威振(1998—),硕士生,从事飞行控制研究.
基金资助:
ZHANG Weizhen, HE Zhen(), TANG Zhangfan
Received:2024-05-24
Revised:2024-06-12
Accepted:2024-06-19
Online:2024-11-28
Published:2024-12-02
摘要:
针对无人机在风扰环境下的栖落机动过程,利用含控制的非线性动力学稀疏辨识(SINDYc)方法与模仿深度强化学习(IDRL)方法设计栖落机动的控制策略.首先,采用域随机化方法建立具有多种风况的栖落机动系统训练环境.然后,基于历史数据和候选函数库,采用SINDYc方法离线学习各个风况下栖落机动系统的稀疏模型,以有效辨识风况信息.接着,在具有多种风况的栖落机动系统训练环境中,采用IDRL算法进行栖落机动控制策略的训练,得到风扰下的栖落机动控制策略.最后,通过数值仿真验证了所设计的栖落机动控制策略在风扰环境下的有效性.
中图分类号:
张威振, 何真, 汤张帆. 风扰下无人机栖落机动的强化学习控制设计[J]. 上海交通大学学报, 2024, 58(11): 1753-1761.
ZHANG Weizhen, HE Zhen, TANG Zhangfan. Reinforcement Learning Control Design for Perching Maneuver of Unmanned Aerial Vehicles with Wind Disturbances[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1753-1761.
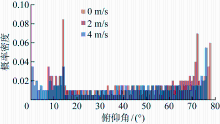
图1
俯仰角密度分布直方图
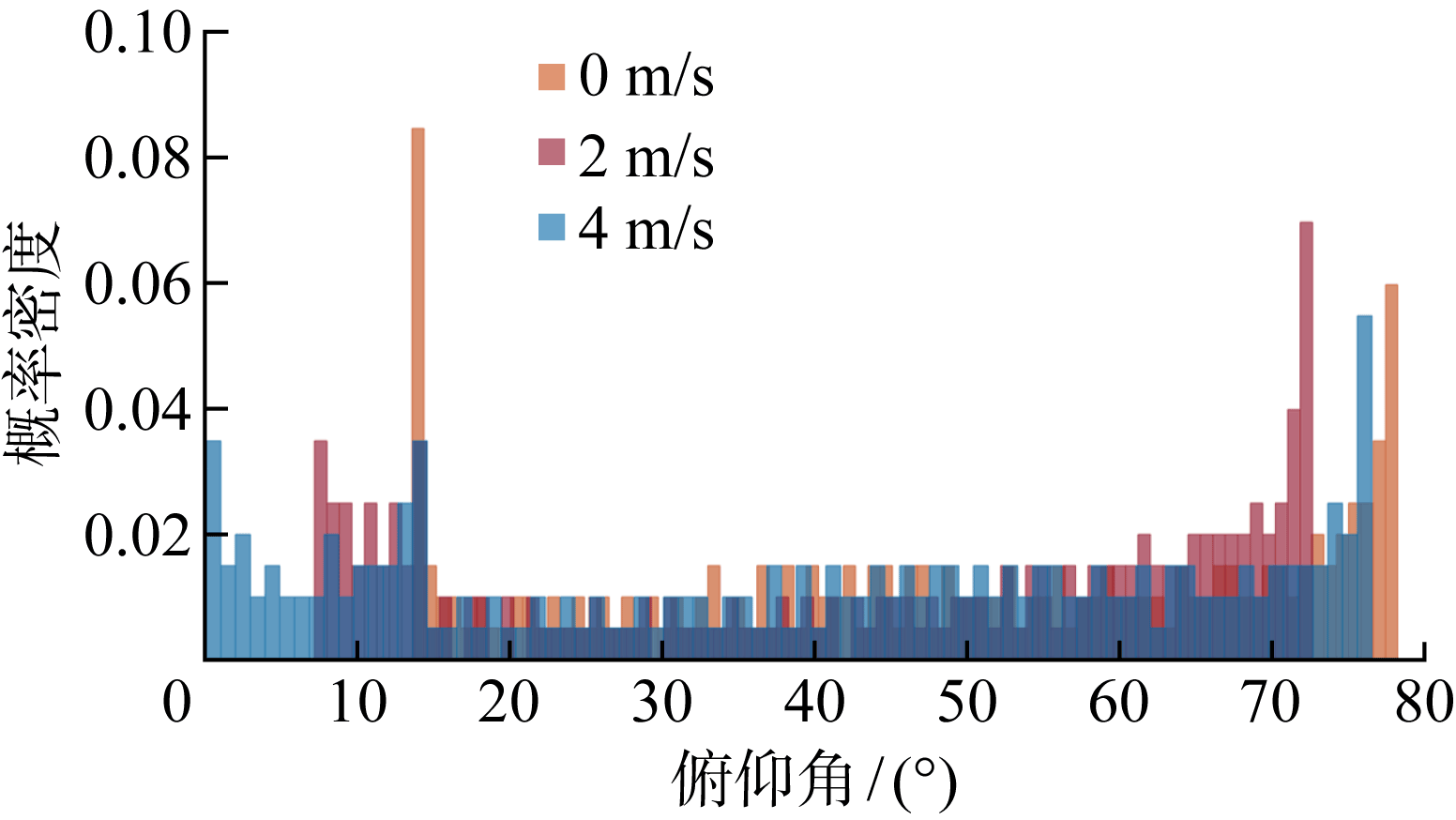
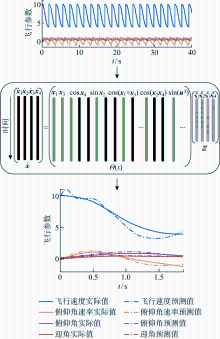
图2
SINDYc算法示意图
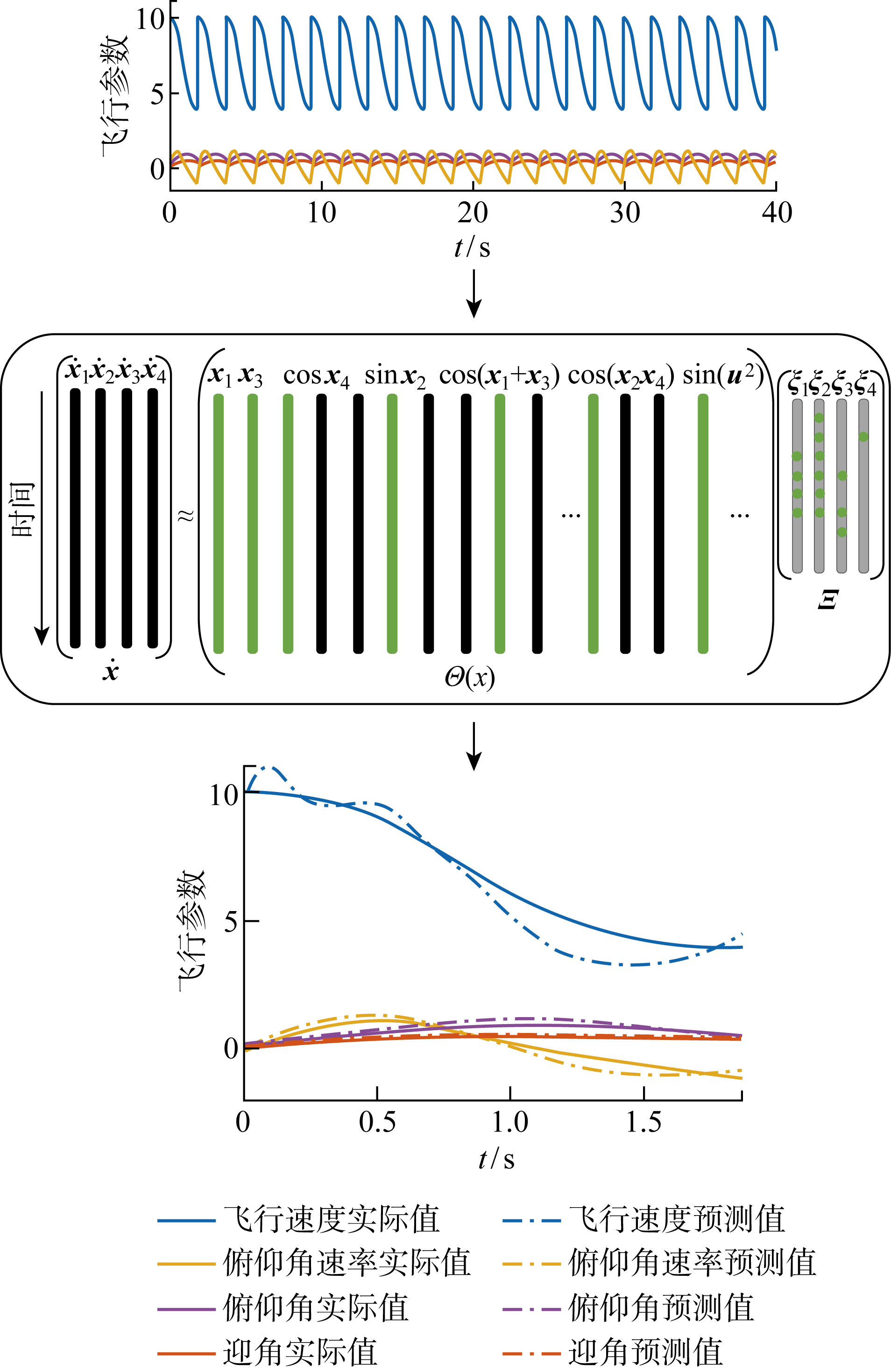
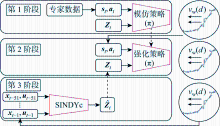
图3
基于SINDYc的栖落机动控制策略框架
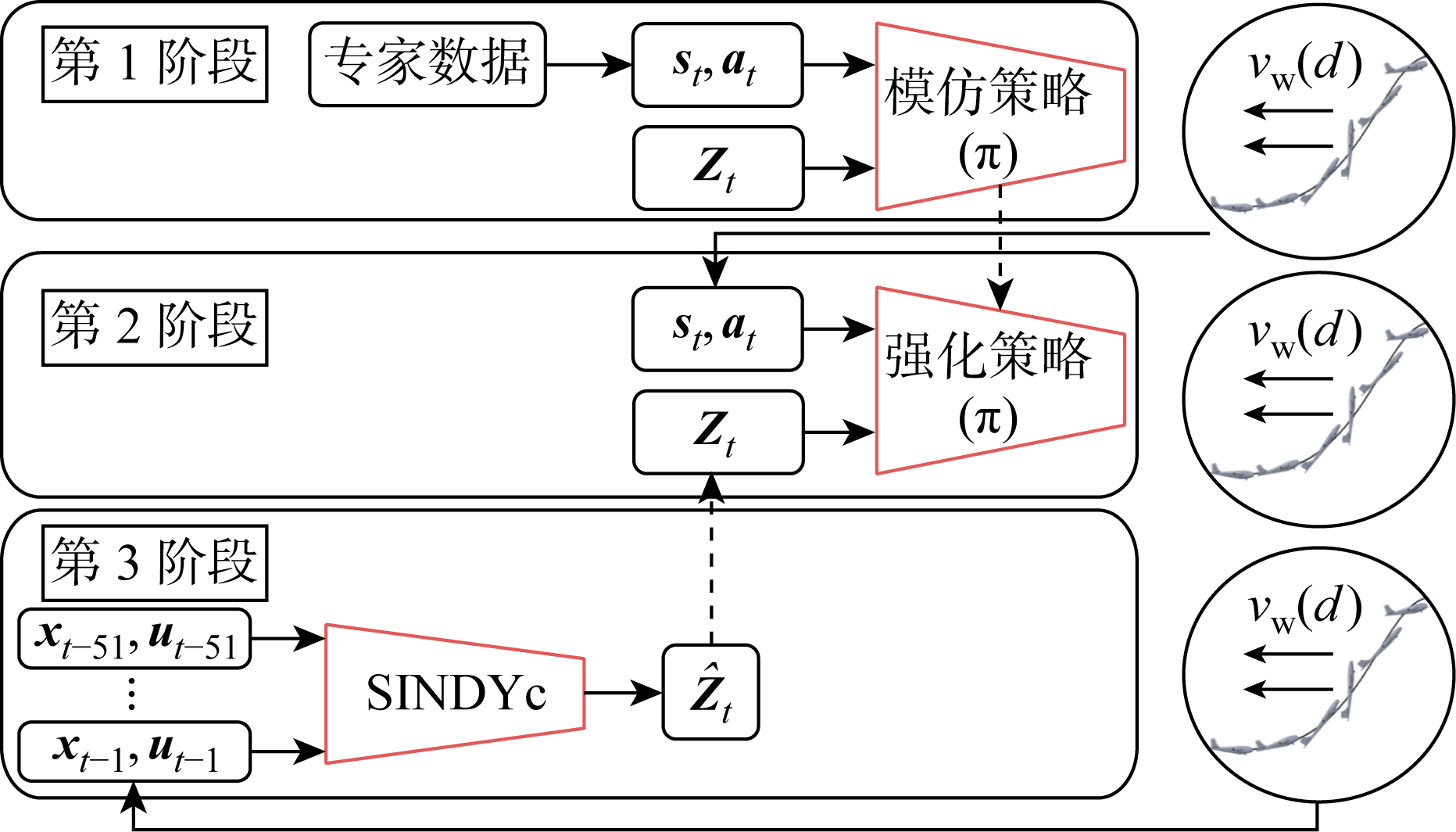
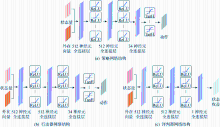
图4
风扰下栖落机动的网络结构
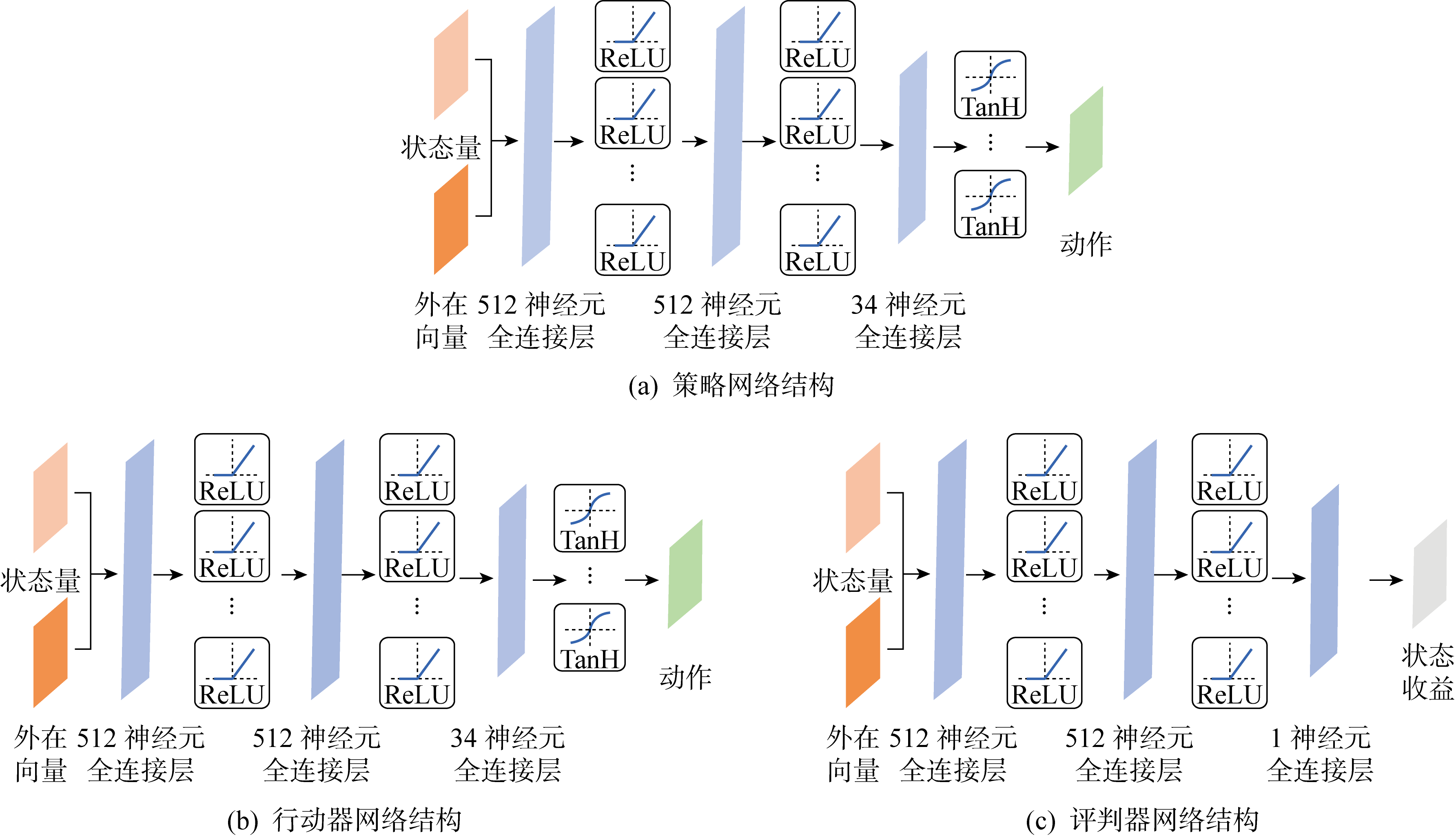
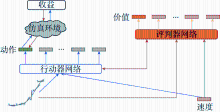
图5
PPO算法框架
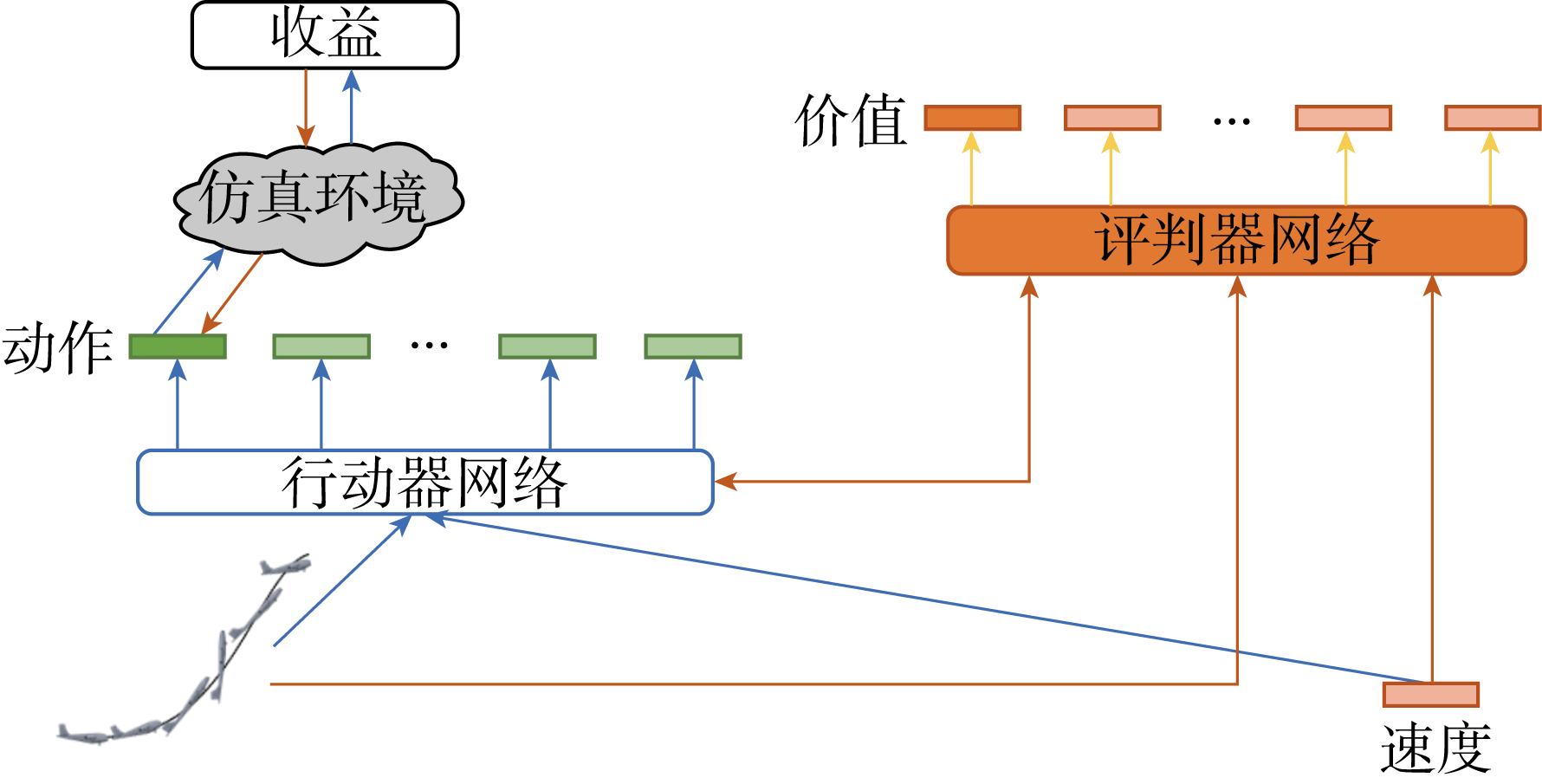
表1
固定翼无人机的几何参数
| 参数 | 数值 |
|---|---|
| m/kg | 0.8 |
| 气动弦长, c/m | 0.25 |
| 翼展, b/m | 1.0 |
| Iy/(kg·m2) | 0.1 |
| 机翼面积, Swing/m2 | 0.25 |
| Se/m2 | 0.054 |
| le/m | 0.235 |
| g/(m·s-2) | 9.8 |
| ρ/(kg·m-3) | 1.225 |
表2
状态及控制量约束参数
| 参数 | 数值 |
|---|---|
| 最大速度, vmax/(m·s-1) | 25 |
| 最大航迹倾斜角, μmax/rad | π/4 |
| 最大迎角, αmax/rad | π/2 |
| 最大俯仰角, θmax/rad | π/2 |
| 最大俯仰角速度, qmax/(rad·s-1) | 3.5 |
| 最大终点俯仰角, θf/rad | π/6 |
| 最大位移, xmax/m | 15 |
| 最大终点高度, hmax/m | 5 |
| 最大升降舵偏转角, δe,max/rad | π/3 |
| T | 3.7698 |
| 终点预设速度, vf/(m·s-1) | 3.5 |
| 终点预设位移, xf/m | 12.3 |
| 终点预设高度, hf/m | 3.5 |
| 终点速度容许误差, σv/(m·s-1) | 0.5 |
| 终点位移容许误差, σx/m | 0.1 |
| 终点高度容许误差, σh/m | 0.1 |
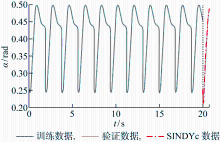
图6
训练和验证阶段的迎角数据序列
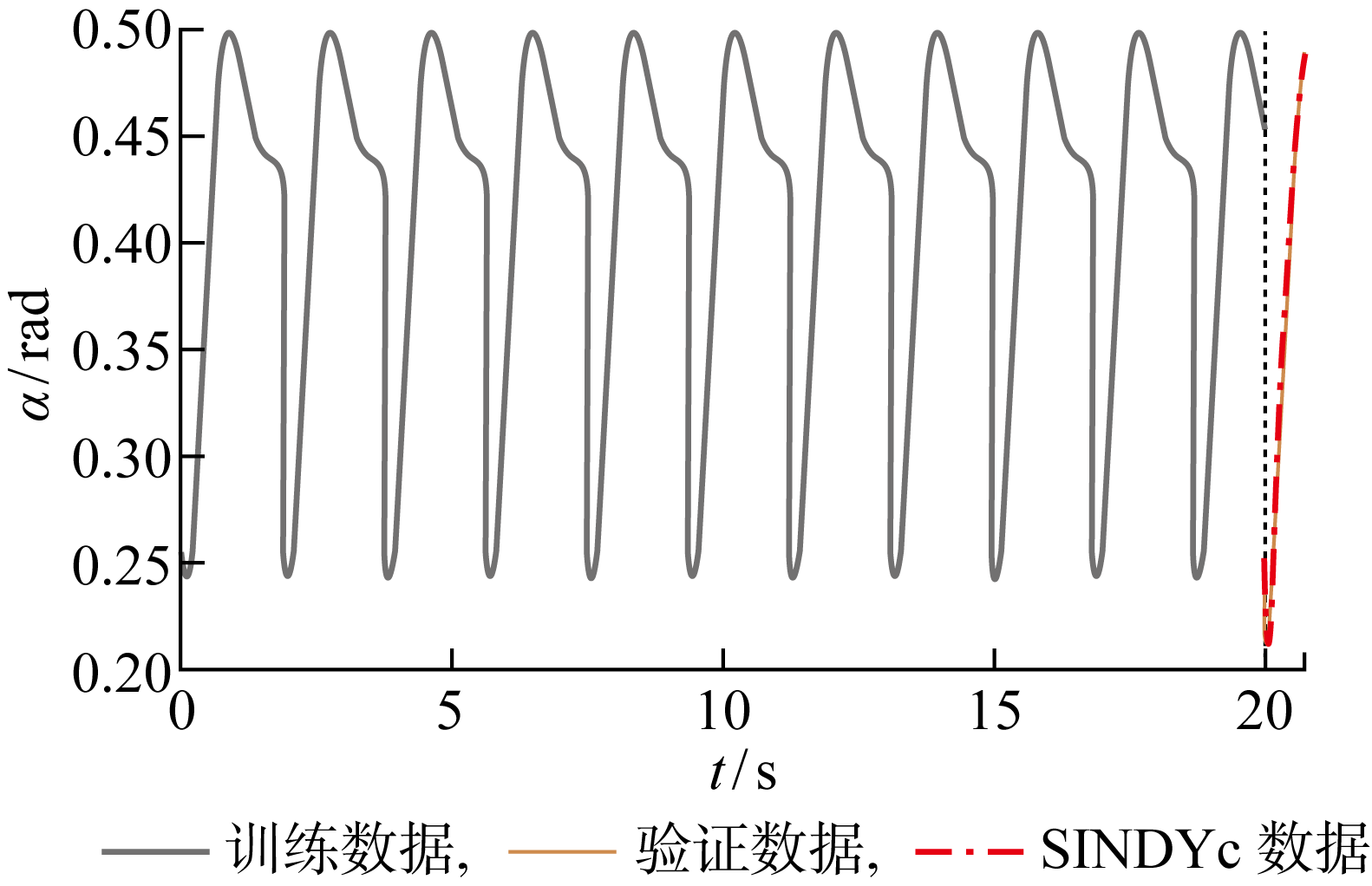
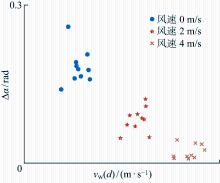
图7
SINDYc预测结果精度图
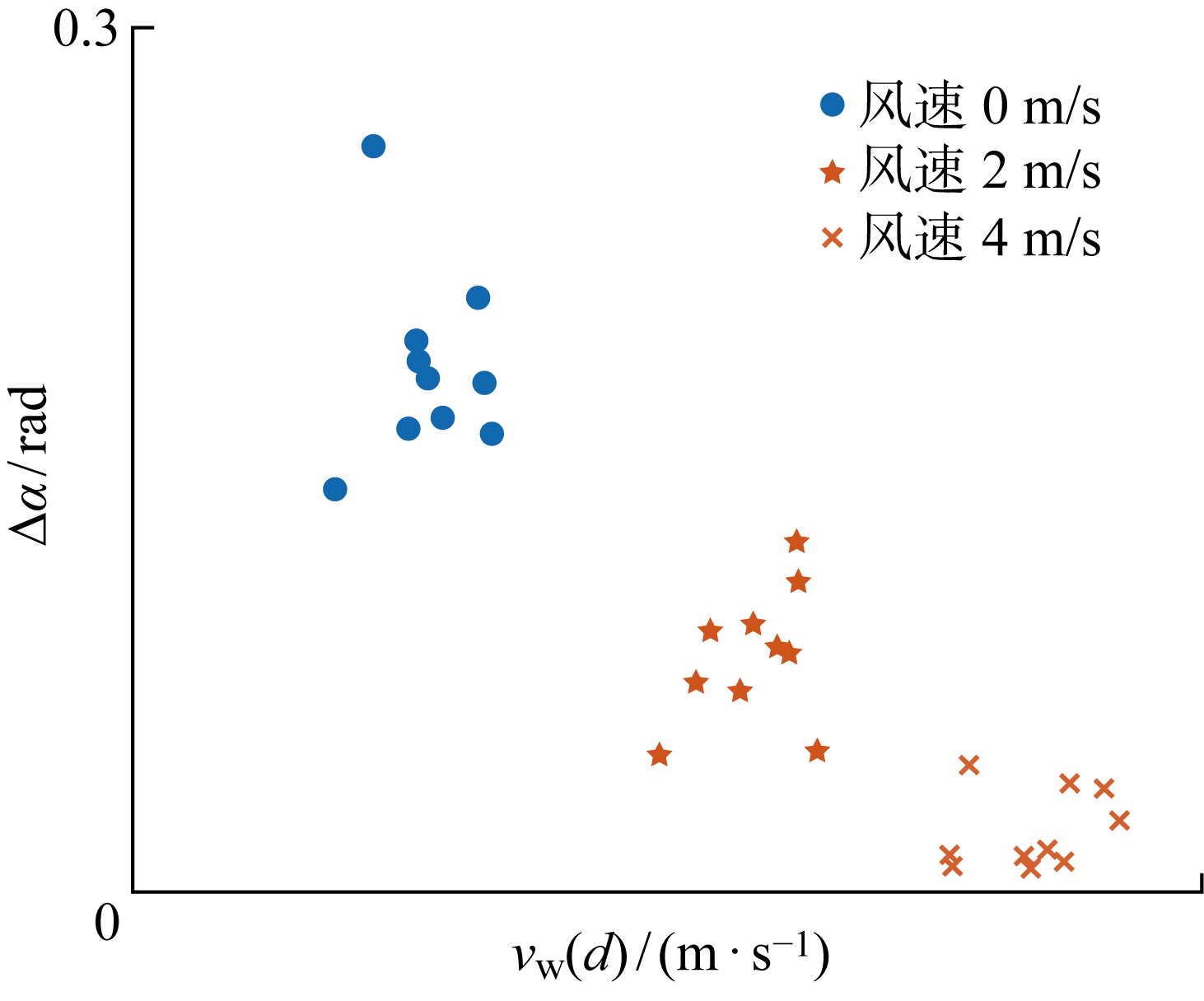
图8
不同策略学习阶段奖励值变化
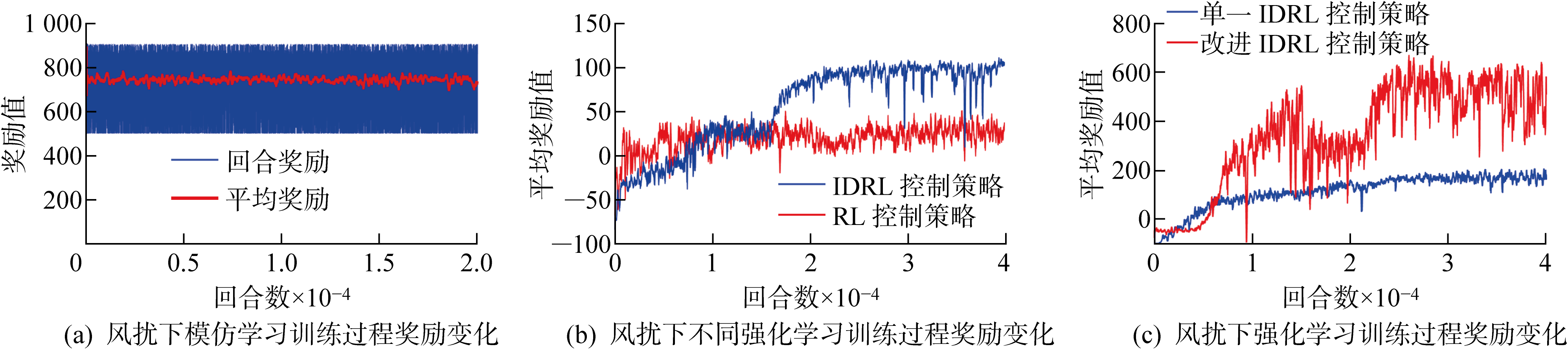
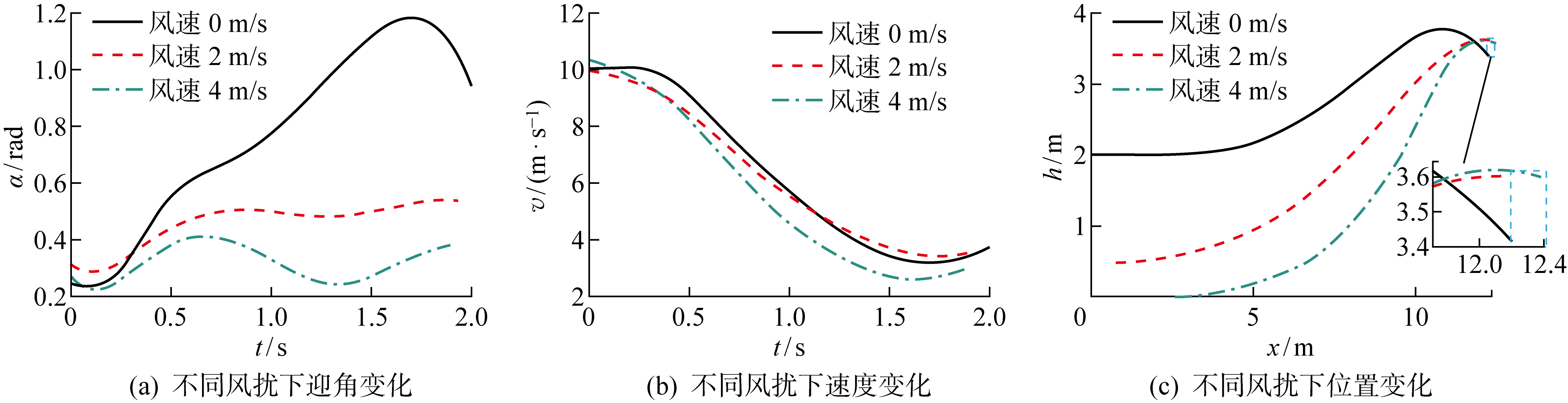
图9
不同风扰下状态变化曲线
| [1] |
BERG A M, BIEWENER A A. Wing and body kinematics of takeoff and landing flight in the pigeon (Columba livia)[J]. The Journal of Experimental Biology, 2010, 213(Pt 10): 1651-1658.
doi: 10.1242/jeb.038109 pmid: 20435815 |
| [2] | ROBERTS J W, CORY R, TEDRAKE R. On the controllability of fixed-wing perching[C]//2009 American Control Conference. St. Louis, USA: IEEE, 2009: 2018-2023. |
| [3] | MOORE J, CORY R, TEDRAKE R. Robust post-stall perching with a simple fixed-wing glider using LQR-Trees[J]. Bioinspiration & Biomimetics, 2014, 9(2): 025013. |
| [4] | RODERICK W R T, CUTKOSKY M R, LENTINK D. Bird-inspired dynamic grasping and perching in arboreal environments[J]. Science Robotics, 2021, 6(61): eabj7562. |
| [5] | FLETCHER L J, CLARKE R J, RICHARDSON T S, et al. Reinforcement learning for a perched landing in the presence of wind[C]//AIAA Scitech 2021 Forum. Reston, USA: AIAA; 2021: AIAA 2021-1282. |
| [6] | 赵辉, 周杰, 王红君, 等. 基于CEEMDAN-PE和QGA-BP的短期风速预测[J]. 电子技术应用, 2018, 44(12): 60-64. |
| ZHAO Hui, ZHOU Jie, WANG Hongjun, et al. Short-term wind speed prediction based on CEEMDAN-PE and QGA-BP[J]. Application of Electronic Technique, 2018, 44(12): 60-64. | |
| [7] | 黄勇东, 陈冬沣, 肖建华, 等. 基于小波包分解和改进差分算法的神经网络短期风速预测方法[J]. 浙江电力, 2017, 36(6): 1-7. |
| HUANG Yongdong, CHEN Dongfeng, XIAO Jianhua, et al. Short-term wind speed forecast method based on WPD-IDE-NN[J]. Zhejiang Electric Power, 2017, 36(6): 1-7. | |
| [8] | 袁亮, 何真, 王月. 变体无人机栖落机动建模与轨迹优化[J]. 南京航空航天大学学报, 2018, 50(2): 266-275. |
| YUAN Liang, HE Zhen, WANG Yue. Modeling and trajectory optimization of perching maneuvers for morphing UAV[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2018, 50(2): 266-275. | |
| [9] | 黄赞, 何真, 仇靖雯. 基于深度强化学习的无人机栖落机动控制策略设计[J]. 导航定位与授时, 2022, 9(6): 25-32. |
| HUANG Zan, HE Zhen, QIU Jingwen. Design of UAV perching maneuver control strategy based on deep reinforcement learning[J]. Navigation Positioning & Timing, 2022, 9(6): 25-32. | |
| [10] | CORY R, TEDRAKE R. Experiments in fixed-wing UAV perching[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Honolulu, USA: AIAA; 2008: AIAA 2008-7256. |
| [11] | HE Z, LI D, LU Y P. Disturbance compensation based piecewise linear control design for perching maneuvers[J]. IEEE Transactions on Aerospace & Electronic Systems, 2019, 55(1): 192-204. |
| [12] |
BRUNTON S L, PROCTOR J L, KUTZ J N. Discovering governing equations from data by sparse identification of nonlinear dynamical systems[J]. Proceedings of the National Academy of Sciences of the United States of America, 2016, 113(15): 3932-3937.
doi: 10.1073/pnas.1517384113 pmid: 27035946 |
| [13] | YU C, VELU A, VINITSKY E, et al. The surprising effectiveness of ppo in cooperative multi-agent games[J]. Advances in Neural Information Processing Systems, 2022, 35: 24611-24624. |
| [1] | 吕海龙, 刘燕斌, 陈柏屹, 何真, 贾军. 折叠翼垂直起降飞行器多体动力学建模和控制[J]. 上海交通大学学报, 2024, 58(11): 1772-1782. |
| [2] | 程帅, 李宸, 张逸伦, 汤超, 孟祥慧, 谢友柏. 面向正向开发的民用飞机飞控系统功能设计方法[J]. 上海交通大学学报, 2023, 57(10): 1305-1315. |
| [3] | 杨庶, 钱云霄, 杨婷. 高超声速飞行器线性变参数一体化式控制律设计[J]. 上海交通大学学报, 2022, 56(11): 1427-1437. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||