上海交通大学学报 ›› 2020, Vol. 54 ›› Issue (9): 943-952.doi: 10.16183/j.cnki.jsjtu.2020.99.008
戚基艳, 金嘉琦, 付景顺( )
)
收稿日期:2019-09-12
出版日期:2020-09-28
发布日期:2020-10-10
通讯作者:
付景顺
E-mail:fujingshun@sut.edu.cn
作者简介:戚基艳(1984-),女,辽宁省大连市人,博士生,现主要从事舰载机牵引车行驶动力学研究
QI Jiyan, JIN Jiaqi, FU Jingshun()
Received:2019-09-12
Online:2020-09-28
Published:2020-10-10
Contact:
FU Jingshun
E-mail:fujingshun@sut.edu.cn
摘要:
对舰载机无杆式牵引车的横摆稳定性控制进行深入的研究分析.考虑舰船横摇、纵摇和垂荡的耦合运动影响,建立轮毂电机驱动的舰载机无杆式牵引车时变非线性动力学模型.分别基于滑模变结构和自适应模糊比例积分微分(PID)控制理论获得横摆稳定性控制所需的补偿力矩,从而实现对理想参考模型的横摆角速度值的跟随.应用MATLAB/Simulink平台对两种控制方法进行仿真对比验证.仿真结果显示,所建立的动力学模型能够很好地反映舰载机牵引车的横摆运动特性.基于准滑动模态的滑模控制方法能够很好地控制牵引车的横摆角速度对理想模型的跟随,实现了对牵引车的稳定控制.在5级及以下海况的干扰下,能够保证系统响应迅速、稳健性高,有效地提高了舰载机无杆式牵引车的行驶稳定性.
中图分类号:
戚基艳, 金嘉琦, 付景顺. 舰载机无杆式牵引车横摆稳定性控制[J]. 上海交通大学学报, 2020, 54(9): 943-952.
QI Jiyan, JIN Jiaqi, FU Jingshun. Yaw Stability Control of Carrier-Based Aircraft Towbarless Tractor Carrier[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 943-952.
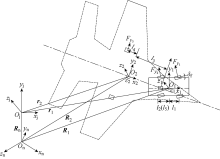
图1
舰载机牵引车系统模型

图2
Δkξ论域输出曲面
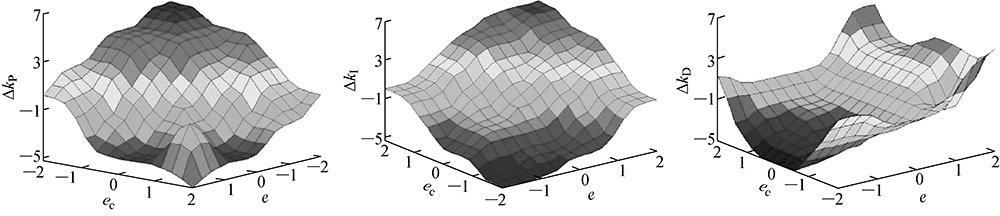

图3
目标牵引车控制仿真模型
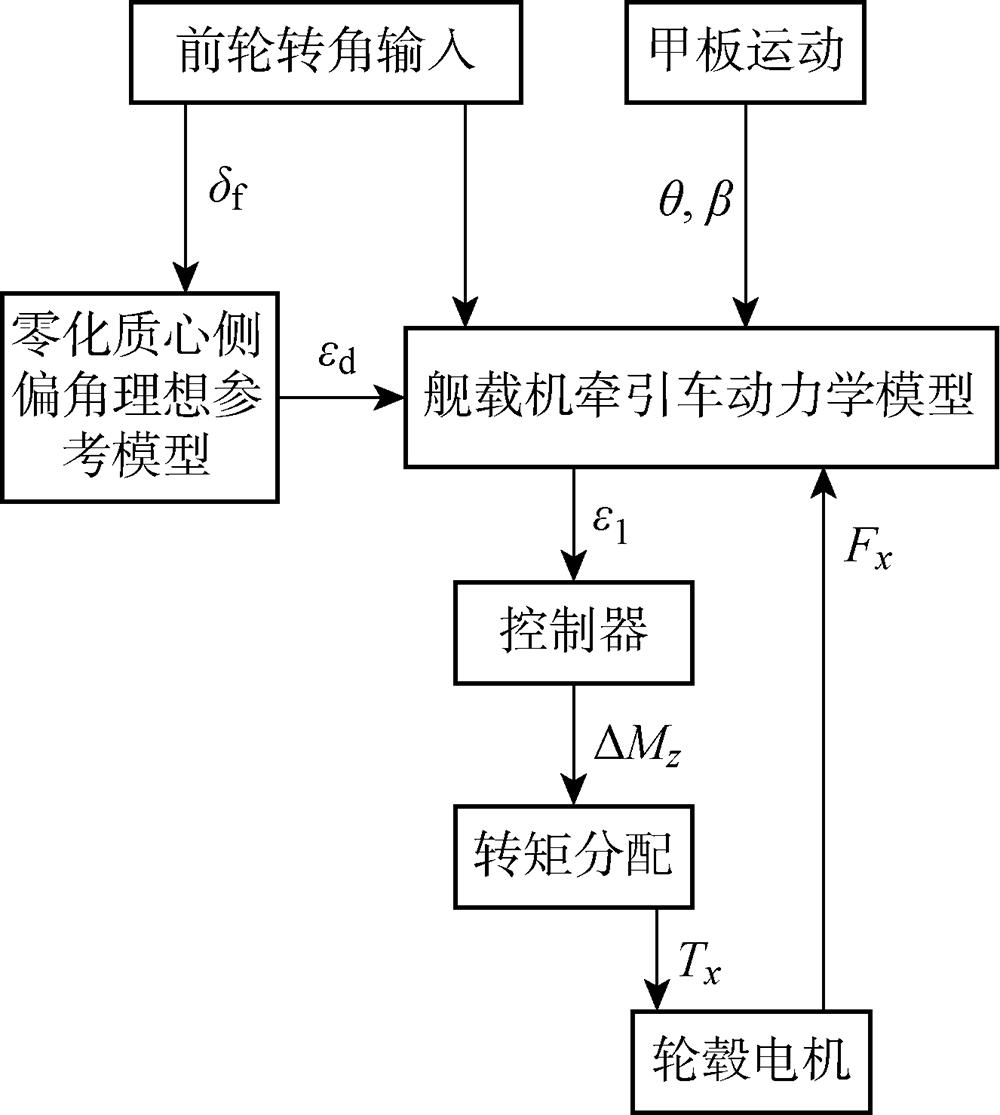
表1
目标牵引车的结构参数
| 参数 | 取值 |
|---|---|
| m1/kg | 1000 |
| uc/(km·h-1) | 5.5 |
| h1/m | 0.3 |
| l1/m | 0.576 |
| l2/m | 1.153 |
| l5/m | 1.153 |
| Iz1/(kg·m-2) | 385.09 |
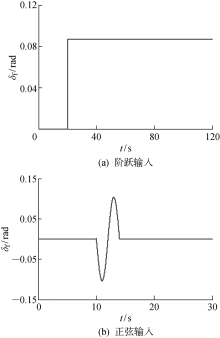
图4
前轮转角输入
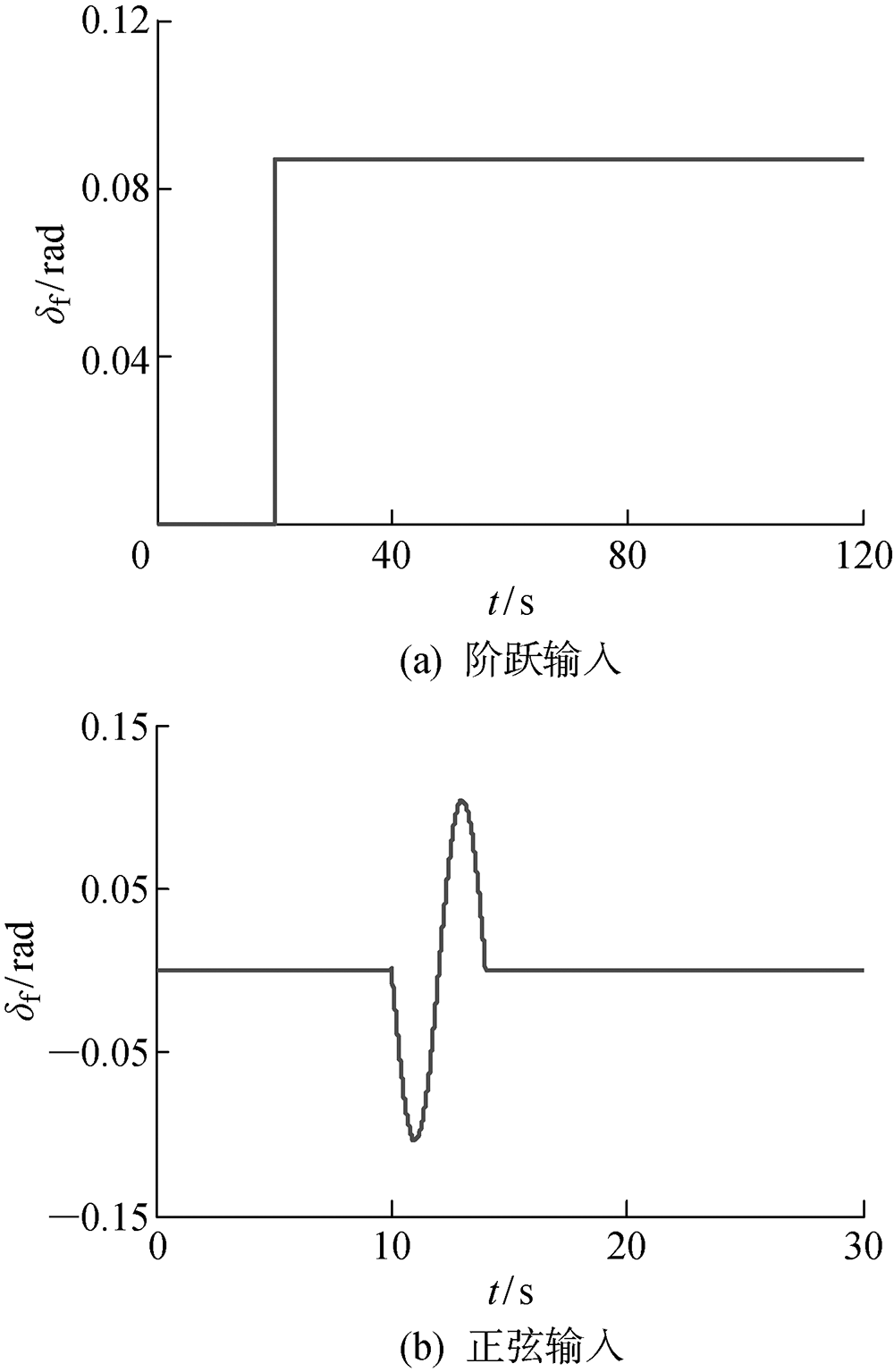

图5
横摆角速度仿真结果对比
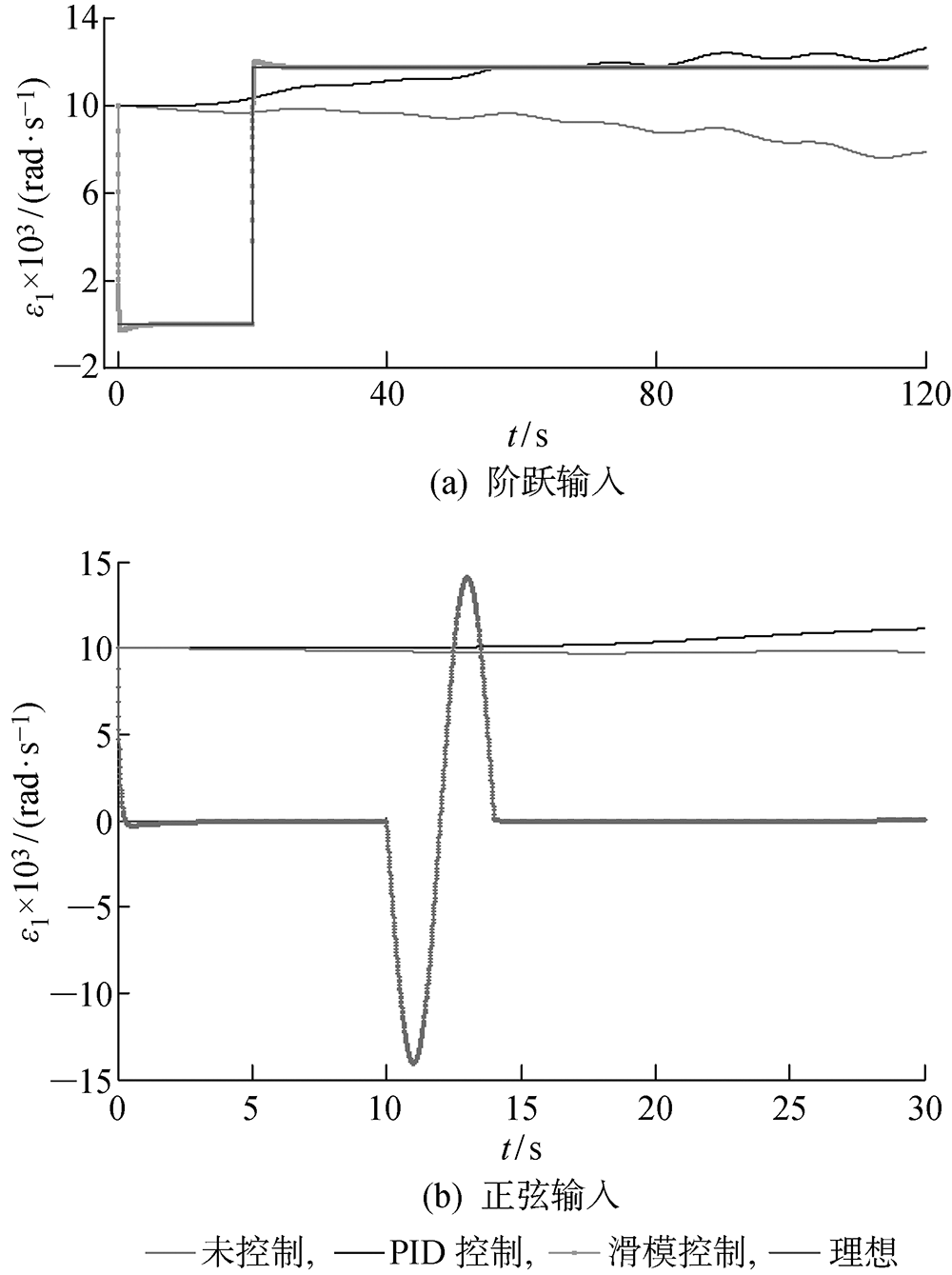

图6
阶跃输入的横摆角速度对比
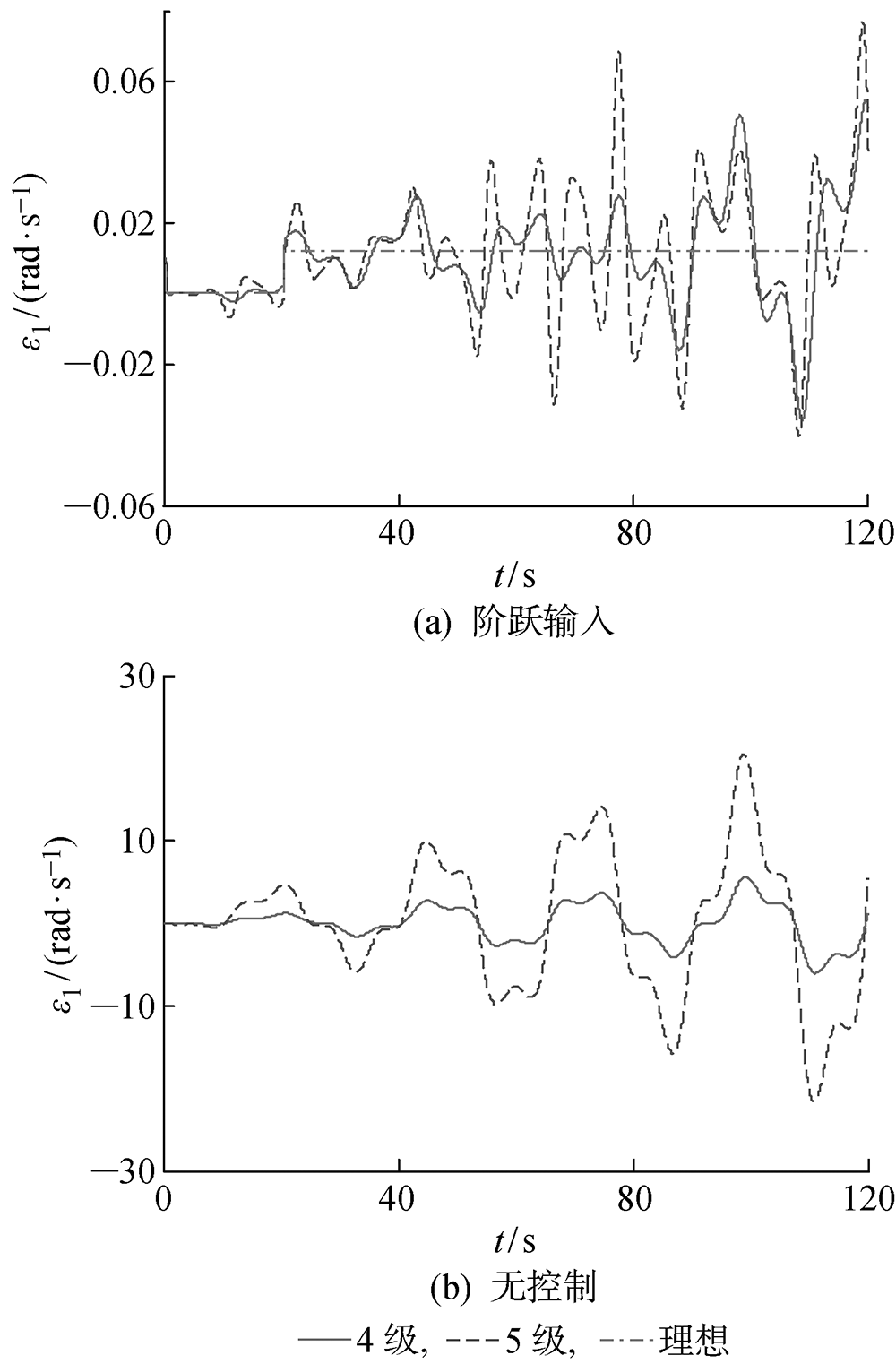

图7
正弦输入的横摆角速度对比
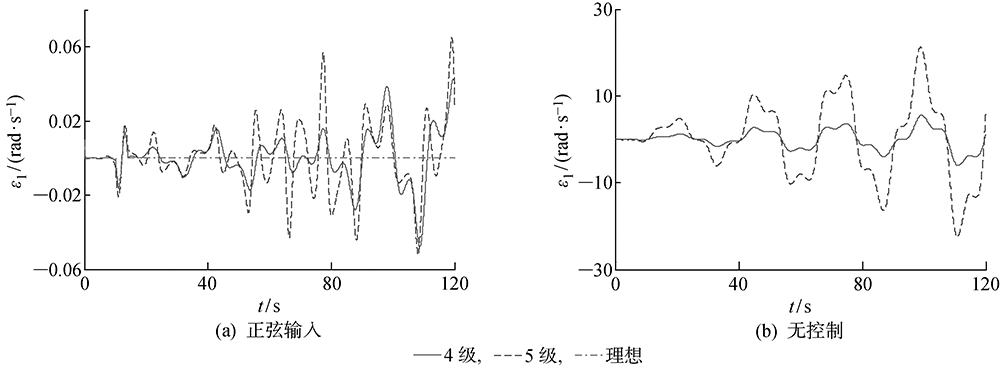

图8
6级海况下横摆角速度对比

表2
不同等级海况下横摆角速度值统计(rad/s)
| 输入类型 | 海况等级 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 4级 | 5级 | 6级 | 理想值 | |||||||||||
| ε1,max | ε1,min | ε1,max | ε1,min | ε1,max | ε1,min | ε1,max | ε1,min | |||||||
| 阶跃 | 0.14440 | -0.11820 | 0.04024 | -0.07695 | 1.736 | -2.107 | 0.01176 | 0 | ||||||
| 正弦 | 0.04285 | -0.04772 | 0.06519 | -0.05200 | 1.724 | -2.119 | 0.01406 | -0.01406 | ||||||
| [1] | 王能建, 周丽杰, 刘红博. 甲板上牵引车-直升机系统的稳定性控制[J]. 上海交通大学学报, 2012,46(7):1146-1152. |
| WANG Nengjian, ZHOU Lijie, LIU Hongbo. Study on stability control for tractor-helicopter system on deck[J]. Journal of Shanghai Jiao Tong University, 2012,46(7):1146-1152. | |
| [2] | 刘洁, 韩维, 徐卫国, 等. 基于滚动时域的舰载机甲板运动轨迹跟踪最优控制[J]. 航空学报, 2019,40(8):180-205. |
| LIU Jie, HAN Wei, XU Weiguo, et al. Optimal path tracking control of carrier-based aircraft on the deck based on RHC[J]. Acta Aeronautica et Astronautica Sinica, 2019,40(8):180-205. | |
| [3] | 张竞, 吴宇, 屈香菊. 舰载机牵引系统路径规划方法[J]. 北京航空航天大学学报, 2018,44(10):2125-2133. |
| ZHANG Jing, WU Yu, QU Xiangju. Path planning method for traction system on carrier aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018,44(10):2125-2133. | |
| [4] | 解本铭, 赵宏伟, 王伟, 等. 遥控无杆飞机牵引车牵引转弯的运动学研究[J]. 机械设计与制造, 2018(7):127-129. |
| XIE Benming, ZHAO Hongwei, WANG Wei, et al. Kinematics research on towing turning of remote control towbarless aircraft tractor[J]. Machinery Design & Manufacture, 2018(7):127-129. | |
| [5] | 王能建, 刘红博, 周丽杰. 甲板上舰载机牵引系统的行驶特性分析[J]. 中南大学学报(自然科学版), 2013,44(6):2304-2310. |
| WANG Nengjian, LIU Hongbo, ZHOU Lijie. Moving characteristics analysis of carrier-based aircraft traction system on deck[J]. Journal of Central South University (Science and Technology), 2013,44(6):2304-2310. | |
| [6] | 王正, 黄葵, 范加利. 基于无杆牵引车的舰载机路径跟踪控制[J]. 计算机测量与控制, 2017,25(5):99-100. |
| WANG Zheng, HUANG Kui, FAN Jiali. Path tracking control for carrier aircraft handled by tractor without bar[J]. Computer Measurement & Control, 2017,25(5):99-100. | |
| [7] | WANG N J, LIU H B, YANG W H. Path-tracking control of a tractor-aircraft system[J]. Journal of Marine Science and Application, 2012,11(4):512-517. |
| [8] | ASIABAR A N, KAZEMI R. A direct yaw moment controller for a four in-wheel motor drive electric vehicle using adaptive sliding mode control[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-Body Dynamics, 2019,233(3):549-567. |
| [9] | 车竞, 和争春. 舰载机弹射起飞的动力学建模与相关问题研究[J]. 飞行力学, 2014,32(6):485-488. |
| CHE Jing, HE Zhengchun. Research on dynamic modeling and correlative problems of catapult launch for carrier-based airplane[J]. Flight Dynamics, 2014,32(6):485-488. | |
| [10] | 胡伟, 傅军. 用于舰艇运动条件下姿态测量补偿的坐标变换算法[J]. 舰船电子工程, 2018,38(2):39-41. |
| HU Wei, FU Jun. Research on algorithm of coordinate transformation using for attitude determination compensation under dynamic circumstances[J]. Ship Electronic Engineering, 2018,38(2):39-41. | |
| [11] | RAO S S. Mechanical vibrations[M]. 5th ed. London, England: Pearson Education, Inc., 2011: 494-503. |
| [12] | 刘金琨. 滑模变结构控制MATLAB仿真[M].第3版. 北京: 清华大学出版社, 2015: 22-44. |
| LIU Jinkun. Sliding mode control design and MATLAB simulation[M]. 3rd ed. Beijing: Tsinghua University Press, 2015: 22-44. | |
| [13] | 何永勃, 夏文卿, 董玉珊. 基于模糊自适应算法的异步电机矢量控制系统[J]. 中国民航大学学报, 2017,35(1):47-51. |
| HE Yongbo, XIA Wenqing, DONG Yushan. Asynchronous motor vector control system based on fuzzy adaptive algorithm[J]. Journal of Civil Aviation University of China, 2017,35(1):47-51. | |
| [14] | XIONG L, YU Z P, WANG Y, et al. Vehicle dynamics control of four in-wheel motor drive electric vehicle using gain scheduling based on tyre cornering stiffness estimation[J]. Vehicle System Dynamics, 2012,50(6):831-846. |
| [15] | 刘秋生, 徐延海, 陈启, 等. 4WID轮毂电机式电动汽车横摆稳定性滑模控制研究[J]. 广西大学学报(自然科学版), 2015,40(5):1080-1091. |
| LIU Qiusheng, XU Yanhai, CHEN Qi, et al. Study on sliding mode control for the yaw stability of 4WID wheel motor electric vehicle[J]. Journal of Guangxi University (Natural Science Edition), 2015,40(5):1080-1091. | |
| [16] | 戚基艳, 金嘉琦, 邹姗姗. 舰载机无杆式牵引车纵向动力学分析[J]. 兵器装备工程学报, 2020,41(1):193-199. |
| QI Jiyan, JIN Jiaqi, ZOU Shanshan. Longitudinal dynamics analysis of carrier-based towbarless aircraft tractor[J]. Journal of Ordnance Equipment Engineering, 2020,41(1):193-199. | |
| [17] | 白冰. 全挂汽车列车横向操纵稳定性研究[D]. 长春: 吉林大学, 2007. |
| BAI Bing. Study on lateral controllability and stability of tractor trailer[D]. Changchun: Jilin University, 2007. | |
| [18] | HAYHOE G F. Braking performance of towbarless towing vehicles during maintenance tows [C]//First Congress of Transportation and Development Institute. Chicago, Illinois, USA: TDI, 2011: 310-319. |
| [19] | 李福海. 飞机地面牵引移动与停放安全技术研究[D]. 南京: 南京航空航天大学, 2016. |
| LI Fuhai. Research on aircraft’s towing and parking safety technology[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016. | |
| [20] | 洪伟宏. 国外航母甲板防滑涂料技术现状及发展趋势[J]. 舰船科学技术, 2015,37(12):166-169. |
| HONG Weihong. Situation and development trend of foreign aircraft carrier deck anti-slip coating technology[J]. Ship Science and Technology, 2015,37(12):166-169. | |
| [21] | 胡孟权, 白双刚, 陈怡然. 舰载机弹射起飞六自由度动力学建模与仿真[J]. 飞行力学, 2013,31(2):97-100. |
| HU Mengquan, BAI Shuanggang, CHEN Yiran. Modeling and simulation for carrier-based aircraft catapult launch with six degrees of freedom[J]. Flight Dynamics, 2013,31(2):97-100. | |
| [22] | 朱梦臣. 大型舰船甲板车行驶动力学研究[D]. 南京: 南京理工大学, 2013. |
| ZHU Mengchen. Research on driving dynamics of vehicle on the ship`s deck[D]. Nanjing: Nanjing University of Science and Technology, 2013. | |
| [23] | 桑德一, 赵建军, 杨利斌. 航母运动对着舰引导雷达精度的影响[J]. 中国舰船研究, 2014,9(6):8-13. |
| SANG Deyi, ZHAO Jianjun, YANG Libin. The impact on landing guidance radar precision caused by the movement of aircraft carriers[J]. Chinese Journal of Ship Research, 2014,9(6):8-13. |
| [1] | 万慧, 齐晓慧, 李杰. 基于线性矩阵不等式的线性/非线性切换自抗扰控制系统的稳定性分析[J]. 上海交通大学学报, 2022, 56(11): 1491-1501. |
| [2] | 郭志远, 虞培祥, 欧阳华. 基于大涡模拟的圆柱绕流剪切层不稳定性[J]. 上海交通大学学报, 2021, 55(8): 924-933. |
| [3] | 鄢雄伟, 杜波, 李绍隆, 张璐华, 李克勇. 推力变化对旋转导弹动稳定性的影响分析[J]. 空天防御, 2021, 4(4): 57-60. |
| [4] | 王宇, 余岳峰, 朱小磊, 张忠孝. 基于光流法和深度学习的燃气火焰稳定性[J]. 上海交通大学学报, 2021, 55(4): 462-470. |
| [5] | 王家琪, 郭建国, 郭宗易, 赵斌. 基于干扰观测器的高马赫数飞行器滑模控制[J]. 空天防御, 2021, 4(3): 85-91. |
| [6] | 曹宇, 韩兆龙, 周岱, 雷航. 对转式垂直轴风力机气动性能研究[J]. 上海交通大学学报, 2021, 55(2): 141-148. |
| [7] | 蔡晖, 高伯阳, 祁万春, 吴熙, 谢珍建, 黄俊辉. “双碳”背景下线间潮流控制器多目标协调控制策略[J]. 上海交通大学学报, 2021, 55(12): 1608-1618. |
| [8] | 郑奕扬, 倪何, 金家善. 基于MSOP的蒸汽动力系统单参数运行稳定性评估方法[J]. 上海交通大学学报, 2021, 55(11): 1438-1444. |
| [9] | 蔡文涛, 王春江, 滕念管, 文泉. 超高速磁浮轨道梁体系的跨平台耦合振动分析[J]. 上海交通大学学报, 2021, 55(10): 1228-1236. |
| [10] | 陈广锋, 余立潮. 基于级联的改进差分进化算法的仓储多订单分批优化[J]. 上海交通大学学报, 2021, 55(10): 1291-1302. |
| [11] | 韩红桂, 杨士恒, 张璐, 乔俊飞. 城市污水处理过程出水氨氮优化控制[J]. 上海交通大学学报, 2020, 54(9): 916-923. |
| [12] | 吴亚东, 李涛, 张永杰. 基于圆弧斜缝处理机匣的压气机叶顶泄漏流实验和数值研究[J]. 上海交通大学学报, 2020, 54(7): 745-755. |
| [13] | 赖生智,吴亚东,田杰,欧阳华. 不同叶顶间隙下压气机旋转不稳定性特性[J]. 上海交通大学学报, 2020, 54(3): 265-276. |
| [14] | 任园园,李显生,郑雪莲,王杰. 液罐车精确动力学建模及其侧倾稳定性[J]. 上海交通大学学报, 2020, 54(3): 312-321. |
| [15] | 温桠妮, 颜国正, 王志武, 姜萍萍, 薛蓉蓉, 王艺芸. 肠道机器人三维接收线圈的设计与优化[J]. 上海交通大学学报, 2020, 54(11): 1117-1123. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||