

肛门失禁(FI)是排便功能紊乱的一种症状,指患者无法蓄控肠道内容物导致大便频繁.肛门失禁病因多样,虽然不直接威胁患者的生命,但却严重影响着患者的生活质量和身心健康.现有的肛门失禁疗法均存在其局限性,且治疗效果不佳,人工肛门括约肌作为治疗肛门失禁的植入式医疗方案,其前景广阔,具有彻底解决肛门失禁问题的潜力,已成为FI治疗领域的研究热点.
最早的人工肛门括约肌是ABS(Artificial Bowel Sphincter),其脱胎于American Medical System公司的AMS800尿道括约肌,采用水泵式手动控制,没有集成任何传感器和电路[1,2,3].法国学者研究出磁珠链式肛门括约肌(MAS),其由数颗磁珠串联组成,利用磁吸力实现控便,当肠道内容物达到一定体积和质量后将其撑开完成排便,没有主动控制过程,亦无任何传感器和电路[4,5].德国研究人员开发的GAS(German Artificial Sphincter)采用双向压电微泵在一体化的储液囊袋和袖套之间输送液体,实现袖套的膨胀、收缩以控便、排便.GAS系统使用锂电池供电,引入了无线充电和遥控,内置的压力传感器可监测袖套中的液体压力.但其动作时间长达数分钟,整体功耗大,不考虑传感器和通讯产生的功耗,在最佳工作条件下每天动作3次,电池仅可支持4 d,且尚未建立便意感知功能[6,7].
基于新一代人工肛门括约肌,本文从系统功耗分析出发,创新地提出用肠道压力波形下面积大小作为便意判断标准,通过分析采样周期与功耗的关系获得最优采样周期,在保证更高的便意感知准确率的同时降低了功耗,并优化了通讯模块的功耗.经过离体和活体实验验证,本文的设计和优化均取得了良好的效果.
1 低功耗便意感知系统
1.1 系统简介
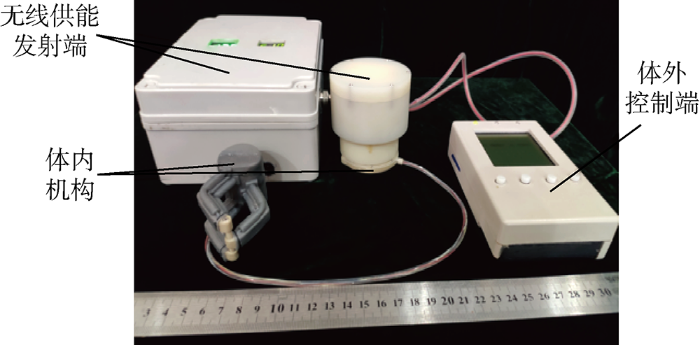
新人工肛门括约肌系统由体内机构、体外控制端、无线供能发射端组成,如图1所示.体内机构包括体内执行机构和无线供能接收模块,无线功能发射端包括发射盒和发射线圈,锂电池位于体内机构的无线供能接收模块中.体内执行机构微型电机的输出经过减速器增大扭矩后,输出到两根传动轴上,分别驱动上下操作臂和中间操作臂运动,以减小或者增大机构开合角度实现控便或者排便功能.集成在臂上的压力传感器模块采集肠壁压力信息并通过单片机控制的通讯芯片传到体外手持控制端,用于便意感知重建并保证肠道血供安全性.体内机构整体覆有生物相容性优异的硅胶膜,机构末端由医用钛合金螺钉连接,避免了植入时打断肠道.系统由锂电池供电,并使用经皮无线供能为锂电池充电.
图1
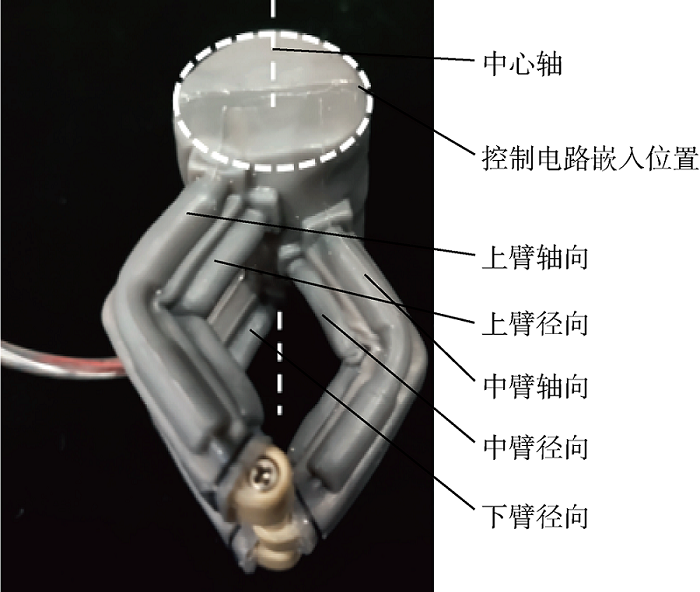
新人工肛门括约肌系统组成如图2所示.体内执行机构共有5路压力传感模块,分布在上、中、下操作臂上,根据其分布方向与机构柱体中心轴的关系,又可分为上臂轴向、上臂径向、中臂轴向、中臂径向及下臂径向.每个传感器囊袋中均充满硅凝胶作为压力传递介质.控制电路嵌于机构柱体上盖内侧,5路传感器与控制电路通过导线相连.控制电路内单片机控制压力传感器采集压力信息,并将信息编码后经通讯模块发送至体外控制端,完成压力信息的收集与传递.
图2
1.2 低功耗设计
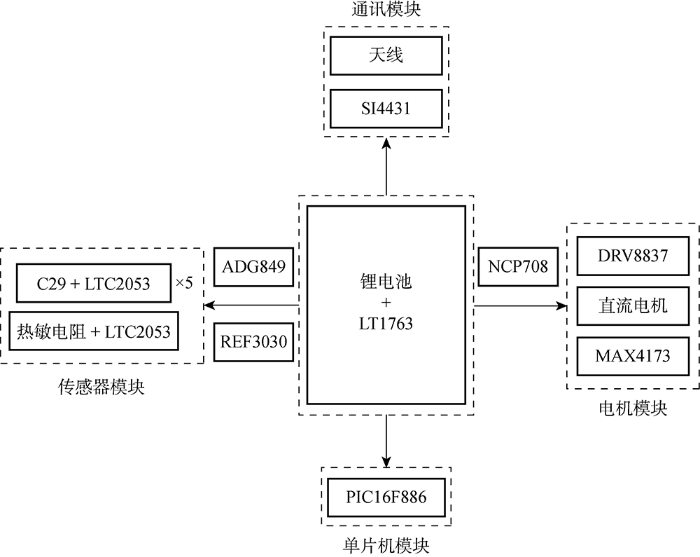
体内控制系统模块如图3所示.体内控制系统可分为电源、传感器、通讯、电机和单片机5个模块,各模块均由体内锂电池供电.电源模块包括锂电池和低压差线性稳压器(LT1763,Linear Tech.,Japan);传感器模块包括模拟开关(ADG849,Analog Devices,American)、参考电压芯片(REF3030,Texas Instruments,American)、压力传感器(C29,TDK,Japan)和高精度热敏电阻(深圳科敏传感器有限公司,深圳),其中C29液态介质压力传感器绑定在焊有运算放大器(LTC2053,Linear Tech.,Japan)及周围电路的微型电路板上;通讯模块包括无线收发芯片(SI4431,Silicon Labs,American)和收发一体式天线;电机模块包括线性稳压器(NCP708,ON Semiconductor,American)、直流电机、直流电机驱动器(DRV8837,Texas Instruments,American)和电流检测放大器(MAX4173,Maxim Integrated,American);单片机模块采用低功耗、高性能、外设丰富的8位单片机(PIC16F886,Microchip,American).
图3
各个模块的工作电流Iw和休眠电流Is如表1所示.其中:电压均为3.3 V恒压;电源模块的电流是指LT1763消耗电流.
表1 各模块工作、休眠时的电流
Tab.1
| 模块名称 | Iw/mA | Is/μA |
|---|---|---|
| 电源模块 | 1.00 | 30 |
| 传感器模块 | 10.05 | 0 |
| 通讯模块 | 31.02(发送)/18.50(接收) | 1 |
| 电机模块 | 169.44 | 0 |
| 单片机模块 | 1.10 | 24 |
根据工作时和休眠后的各模块电流差异显著,为体内控制板设计了两种工作模式.① 工作模式.该模式下单片机正常工作,通讯模块处于接收状态,随时对体外手持控制端发送的命令作出响应,传感器模块周期性开启,电机模块动作时开启,机构不运动时平均电流为20.6 mA,机构运动时平均电流为190.04 mA.② 待机模式.该模式下单片机进入低功耗,仅开启看门狗定时器,周期性唤醒,通讯模块进入睡眠,电机模块关断,传感器模块周期性开启,系统总电流可降至54 μA左右.
为建立便意感知功能同时降低系统总功耗,系统需周期性地在工作模式与待机模式中切换.由传感器模块采集肠道压力信息,单片机模块暂存压力信号后控制通讯模块发出通讯包,体外控制端接收到通讯包后进行解析与便意评估,以决定体内系统下一周期的工作状态.根据文献研究,正常排便频率在一周3次和一日3次之间[10],人工肛门括约肌大部分时间将处于空闲状态,故待机模式下传感器采集模块与通讯模块周期性开启产生的功耗是系统低功耗设计的重点.
当体内控制系统收到体外控制端发出的进入待机模式命令时,单片机控制ADG849模拟开关关断传感器电源供给、控制NCP708关断电机模块电源供给、控制SI4431进入休眠模式,并使自身开启看门狗定时器(WDT)进入休眠,而通讯模块在休眠模式下无法接受体外控制端的命令,因此需要设计一种唤醒方法.上一代人工肛门括约肌采用被动等待周期窗口的唤醒方法,即在休眠模式下,每次通讯模块发送信息后留出一定时间作为接收窗口,体外控制端可在这段窗口时间内发送唤醒命令[11].
受单片机中断与查询工作机制的启发,设计了一种相对节能的缓存命令唤醒方法,其工作流程如图4所示.体外控制端发送待机命令使体内控制系统进入休眠模式,待收到体内控制系统返回的确认信号后使其能待机标志位,在一个发送周期的时间段内体外控制端请求发送的命令会被暂存到缓冲区,等待接收到体内控制系统发送的待机模式下的数据包后,体外控制端再将缓冲区中的命令发送出去,体内控制系统只需在每次发送完数据包后留出几百毫秒的接收时间,就可以进行命令的接收,从而极大地减少了时间窗口带来的功耗.
图4
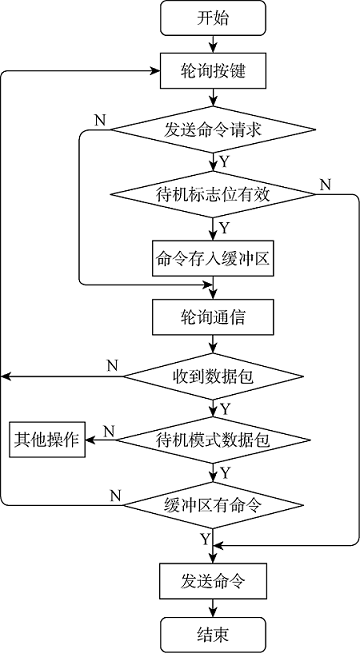
图5
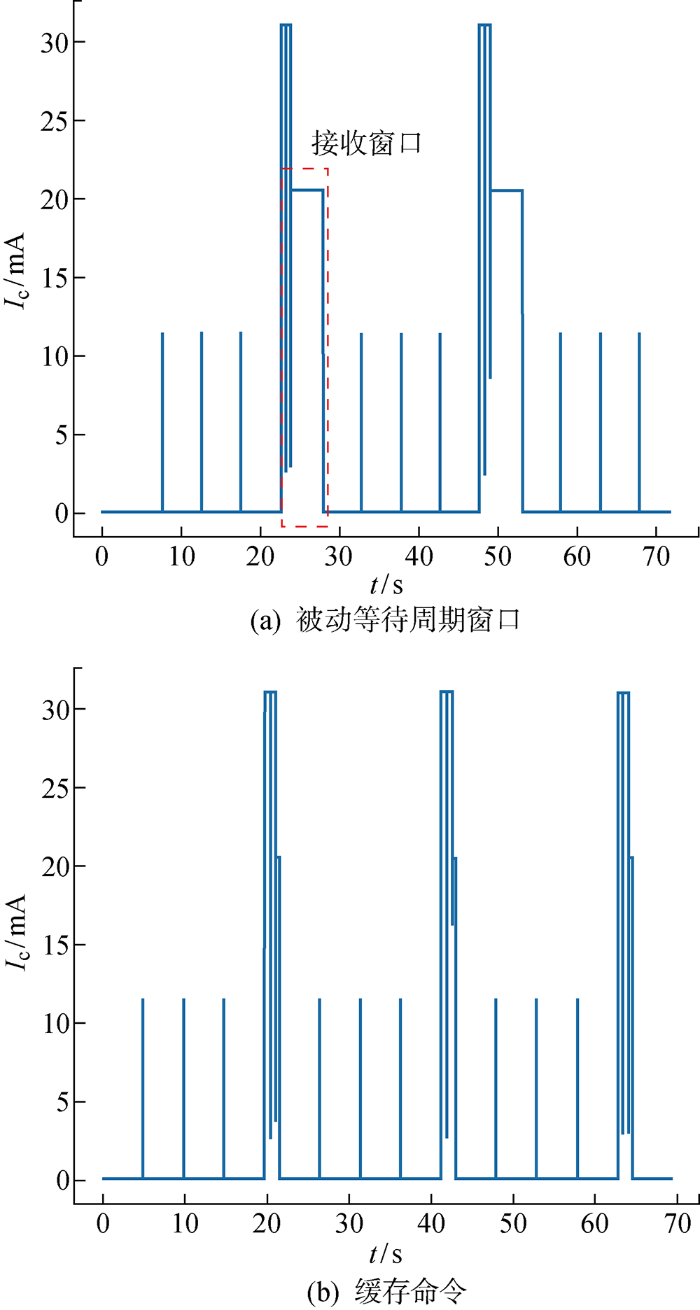
图5
通讯模块在两种唤醒方法下的功耗
Fig.5
Power consumption of communication module using two wake-up methods
1.3 采样频率分析与优化
结直肠测压研究结果表明,人体直肠道存在周期性活动(PRMA),其频率平均值为0.054 Hz,平均幅值为2.53 kPa,被认为是直肠控便机制的表征[14].更进一步的研究表明,排便前一小时PRMA的数目、幅值与其余时间相比存在显著性差异,排便前一小时PRMA曲线下面积(AUC)较其余时间增加42%[15].因此,通过压力信息采样可建立有效的便意感知.根据“Nyquist”采样定理,采样频率应为PRMA频率的两倍,即0.108 Hz以上.提高采样频率可提高便意信息还原度,但由于通讯模块单次发射字节数和单片机闪存容量限制,过高的采样频率会频繁地启用发射模块,造成系统功耗激增,进而显著缩短待机时间.因此,需要对采样频率进行设计优化.
系统功耗可根据表1中的电流值与采样周期T列式计算.通讯模块待机模式下单次发送时间为1.29 s,与通讯模块发送电流相比,休眠时各模块电流可忽略不计,最终系统每秒平均电流Iavg可按下式计算,其中:I1、I2、I3分别为电源模块工作电流、通讯模块工作电流、单片机工作电流.
系统每秒平均电流与采样周期关系如图6所示.采样周期从12 s逐渐缩短至2 s,系统每秒平均电流由0.87 mA缓慢上升至4.60 mA.当采样周期缩短到2 s内后,系统每秒平均电流迅速上升.
图6
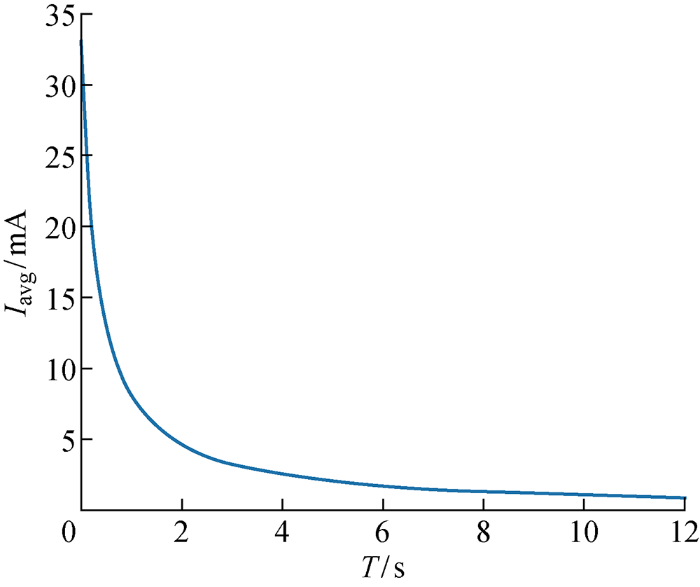
考虑采样频率应大于0.108 Hz,即采样周期应在0~9.26 s之间,同时根据系统每秒平均电流与采样周期的关系曲线,采样周期应大于2 s以避免过大的电流消耗.因此,初步确定的采样周期取值范围为2~9.26 s.PIC16F886单片机的WDT使用振荡频率为31 kHz的低频内部振荡器作为工作的时基,由一个16位预分频器和一个8位预分频器控制超时周期.通过计算,其超时周期落在2~9.26 s范围内的有2.114、4.228、8.456 s.综合考虑便意信息还原度与系统功耗,确定系统采样周期为4.228 s,下文将通过便意信息模拟采样实验验证该采样周期的有效性.
表2 两种模式下每日各模块工作、待机时间
Tab.2
| 模块名称 | 工作模式 | 待机模式 | |||
|---|---|---|---|---|---|
| to1/min | ts1/min | to2/min | ts2/min | ||
| 电源模块 | 30 | 0 | 0 | 1410 | |
| 传感器模块 | 0 | 30 | 0 | 1410 | |
| 通讯模块 | 1.8705(发送)/ 28.1295(接收) | 0 | 87.9135 (发送) | 1322.0865 | |
| 电机模块 | 0.3 | 29.7 | 0 | 1410 | |
| 单片机模块 | 30 | 0 | 87.9135 | 1322.0865 | |
经计算,系统每日整体功耗为198.008 mW·h,基于系统所用锂电池标称容量为950 mA·h,标称电压为3.7 V的事实,故系统理论待机时间可达到17.75 d.
2 验证实验设计与结果
2.1 便意信息模拟采样实验
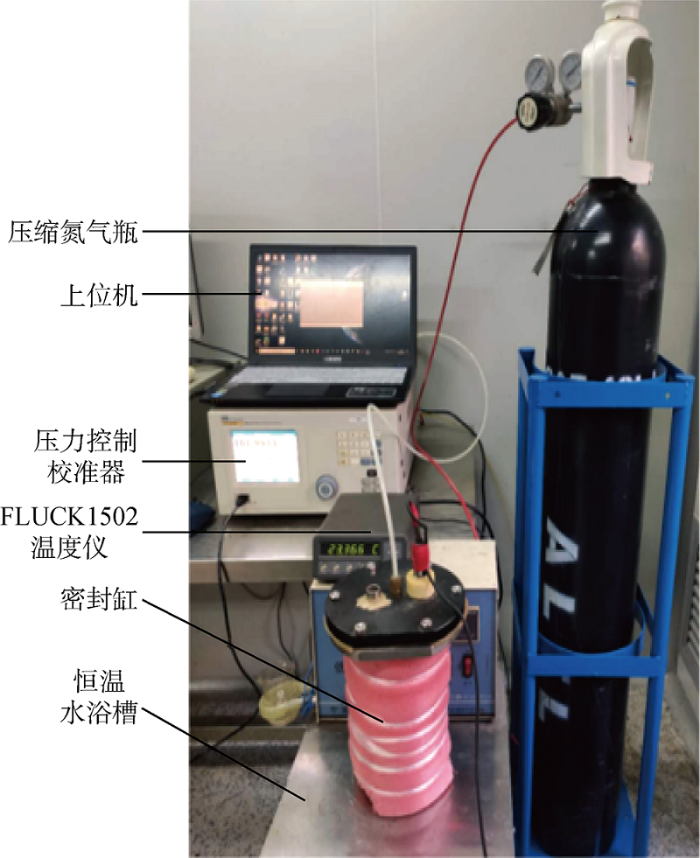
实验平台包括FLUKE DHI PPC4压力控制校准器、压缩氮气瓶、空气抽气机、密封缸、恒温水浴槽、FLUCK 1502温度仪、人工肛门括约肌样机和体外控制端.模拟采样实验平台如图7所示.压缩氮气瓶、空气抽气机通过胶管与压力控制校准器相连,实现密封缸内加压、减压与恒压.密封缸放置于可调节温度的恒温水浴槽中,FLUCK 1502温度仪的探头深入于密封缸内,用于监测密封缸内的温度.人工肛门括约肌样机置于密封缸内,由体外控制端控制其读取缸内压力信息并发送至体外控制端.上位机通过RS232串口与压力控制校准器连接,通过串口发送控制命令操控密封缸内压力的变化.
图7
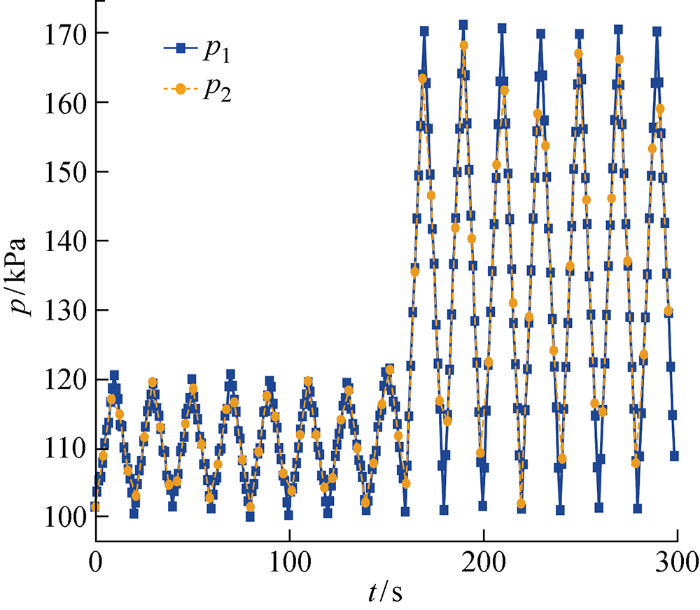
便意信息模拟采样实验分为两步.第1步为传感器标定.保持密封缸内温度恒定为40 ℃,先控制密封缸内压力在90~130 kPa范围内,以5 kPa固定步长线性增加,再控制密封缸内压力以相同步长线性减小,每次加压或减压待缸内压力稳定后,通过体外控制端读取人工肛门括约肌5路压力传感器的数值p*.第2步为模拟采样.用体外控制端控制人工肛门括约肌样机进入待机模式,压力控制校准器进入直接压力控制模式,利用串口定时发送命令“DF n”与“IF n”,使密封缸压力p1以高速率小步长微增或微减,接着使用“ATM”命令记录每个节点的压力p2,一段时间后取出体外控制的SD卡并读取其中的存储数据.每次实验时长为300 s,分为两个等长区间,其中后半区间150~300 s的压力峰值是前半区间0~150 s的135%~145%,重复该实验50次.
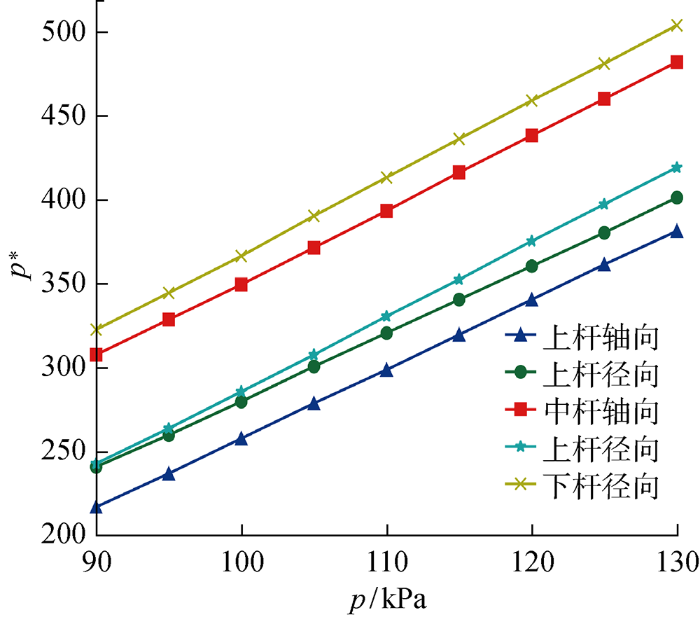
第1步的实验结果如图8所示,其中p为压力.对压力传感器读数与压强用一次多项式拟合,由于传感模块在制造时压力传递介质硅凝胶的填充量没有严格控制,所以压力敏感面的初始值存在差异.因此,拟合出的直线斜率与截距并不相同,即传感器的压力传递系数和压力初始值不同.5路传感器在90~130 kPa压力范围内均表现出优异的线性度,R2均大于0.99.根据传感器拟合直线的斜率和截距,可将传感器十六进制读数转换为实际压力值.
图8
第2步的某次实验结果如图9所示.由于压力控制器自身的压力调整过程是非线性提升的,所以密封缸压力呈近似三角波的形状,在50次的重复实验中,对2个区间的AUC进行计算,共有48次实验的后半区间AUC为前半区间的135%~145%,2次实验的后半区间AUC小于前半区间的135%,准确率为96%.分析2次判断失败的数据发现,由通讯丢包引起了数据缺失导致采样波形失真,后续可通过优化通讯电路解决.
图9
2.2 功耗对比实验
功耗实验为活体实验的重要组成部分,2018年4月与2019年4月分别进行了两次活体实验,共有4头雌性巴马小香猪接受了人工肛门括约肌植入,其年龄均在4个月左右,平均体重为26.2 kg.手术由上海市浦东新区人民医院肛肠外科主任医师实施,实验地点分别为上海市第六人民医院和上海交通大学七宝校区动物实验中心.实验过程中对动物的处置遵循上海交通大学实验动物伦理与使用委员会的规定.活体实验中的4套人工肛门括约肌的锂电池型号相同且均经过锂电池容量检测仪测量,其容量差异小于5 mA·h,其中2019年4月植入的两套人工肛门括约肌经过了上述功耗优化.
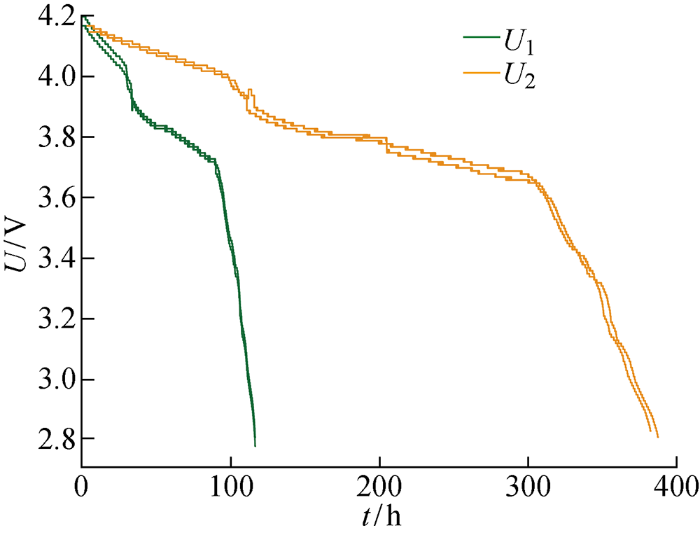
手术一周后开始功耗实验,待机构首次电量耗尽后通过经皮无线供能充电,利用体外控制端实时观察电池电压U,待电池电压维持30 min不再增加时,正式进入实验周期.机构每日动作两次,每次处于工作模式的时间为15 min,其余时间进入待机模式采集压力信息并发送给体外控制端,机构电量再次耗尽时功耗实验结束.
每次功耗实验结束后取出体外控制端的SD卡,读取电压信息,功耗优化前电压为U1,功耗优化后电压为U2,实验结果如图10所示.未经过功耗优化的两套机构平均工作时长为116.52 h,约4.86 d;功耗优化后的平均工作时长达到384.52 h,约16.02 d,较未优化时提升了230%.
图10
3 结语
本文对新一代人工肛门括约肌的功耗进行分模块分析,提出用压力曲线下的面积增量代替单一压力阈值作为便意重建依据的方法,根据采样周期与功耗之间的关系,确定实际使用中的最佳采样周期.由于通讯模块工作模式和待机模式存在巨大的功耗差异,所以针对通讯模块设计了缓存命令唤醒法,替代被动等待唤醒周期窗口的方法,使功耗进一步减小,由理论计算可知,待机时间可达17.75 d.随后本文设计了便意模拟采样实验,证明依照上述采样周期进行采样可很好地还原肠道压力波形,准确率可达96%.此外,活体功耗对比实验显示,本文对系统功耗的优化卓有成效,待机时间延长了230%.
综上,本文所进行的功耗分析与优化、采样周期确定研究具有很好的实践意义,对于人工肛门括约肌的便意感知重建和功耗优化具有重要的意义,使其更具临床应用价值.
参考文献
A biomechanical model of the human defecatory system to investigate mechanisms of continence
[J].DOI:10.1177/0954411918756453 URL [本文引用: 1]
Artificial sphincters to manage urinary incontinence: A review
[J].DOI:10.1111/aor.2018.42.issue-9 URL [本文引用: 1]
Artificial muscle devices: Innovations and prospects for fecal incontinence treatment
[J].DOI:10.1007/s10439-016-1572-z URL [本文引用: 1]
Challenges faced in the clinical application of artificial anal sphincters
[J].DOI:10.1631/jzus.B1400242 URL [本文引用: 1]
Magnetic anal sphincter augmentation in patients with severe fecal incontinence
[J].DOI:10.1097/DCR.0000000000000263 URL [本文引用: 1]
Artificial muscle devices: Innovations and prospects for fecal incontinence treatment
[J].DOI:10.1007/s10439-016-1572-z URL [本文引用: 1]
Systematic review of surgical treatments for fecal incontinence
[J].DOI:10.1097/DCR.0000000000000594 URL [本文引用: 1]
仿生人工肛门括约肌假体的机构设计和实验验证
[J].
Design and experimental verification of a novel puborectalis-like artificial anal sphincter
[J].
人工肛门括约肌无线供能系统设计与优化
[J].
Design and optimization of wireless energy supply system for artificial anal sphincter
[J].
Normal rectal filling sensations in patients with an enlarged rectum
[J].DOI:10.1007/s10620-018-5201-6 URL [本文引用: 1]
A novel puborectalis muscle artificial anal sphincter system with the module of sensory perception
[J].
Anorectal dysfunction after laparoscopic low anterior rectal resection for rectal cancer with and without radiotherapy (manometry study)
[J].DOI:10.1002/jso.24885 URL [本文引用: 1]
Preliminary study of a novel puborectalis-like artificial anal sphincter
[J].DOI:10.1111/aor.2017.41.issue-9 URL [本文引用: 1]
Sexual abuse is associated with an abnormal psychological profile and sleep difficulty in patients with irritable bowel syndrome in Taiwan
[J].DOI:10.5056/jnm17004 URL [本文引用: 1]
Spatial and temporal organization of pressure patterns throughout the unprepared colon during spontaneous defecation
[J].DOI:10.1111/j.1572-0241.2000.01839.x URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}