Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (10): 1388-1396.doi: 10.16183/j.cnki.jsjtu.2021.290
• Mechanical Engineering • Previous Articles Next Articles
WANG Yuxuan, LIU Zhaoyu, WANG Jiangbei, FEI Yanqiong( )
)
Received:2021-08-04
Online:2022-10-28
Published:2022-11-03
Contact:
FEI Yanqiong
E-mail:fyq@sjtu.edu.cn.
CLC Number:
WANG Yuxuan, LIU Zhaoyu, WANG Jiangbei, FEI Yanqiong. Dual Modular Soft Robot with Multi-Terrain Movement Ability[J]. Journal of Shanghai Jiao Tong University, 2022, 56(10): 1388-1396.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.290
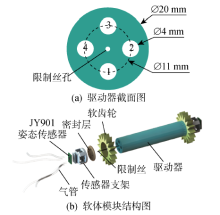
Fig.1
Design of soft module


Fig.2
Dual module soft robot
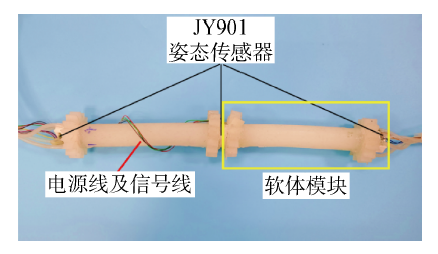
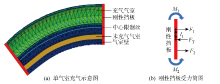
Fig.3
Schematic diagram of source of bending moment
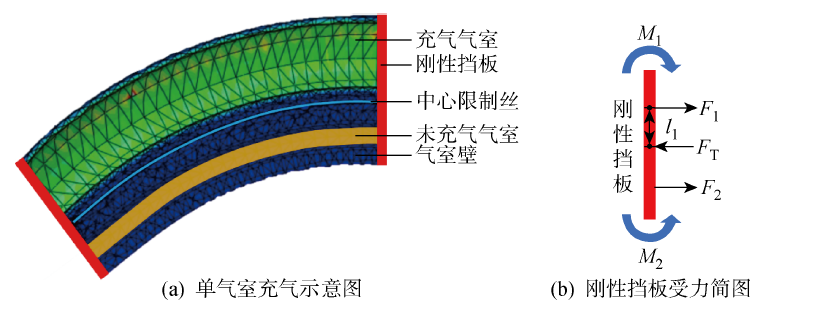

Fig.4
Diagram of bending analysis
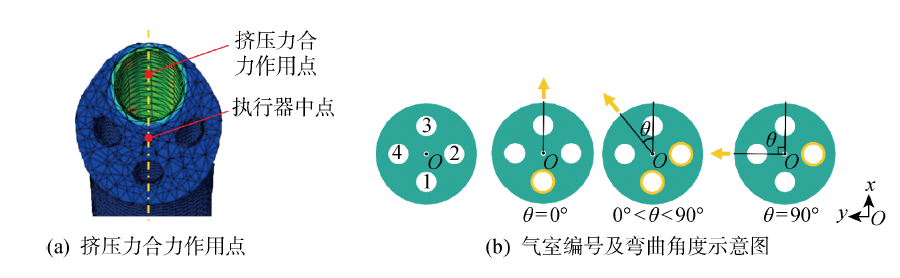

Fig.5
Pressure change pattern of four air chambers of actuator
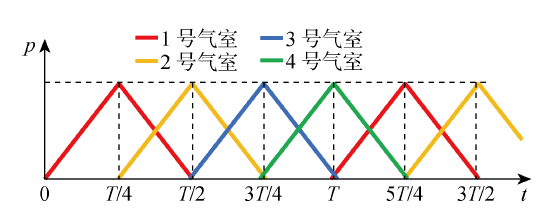
Fig.6
Schematic diagram of rotary movement of straight-through actuator
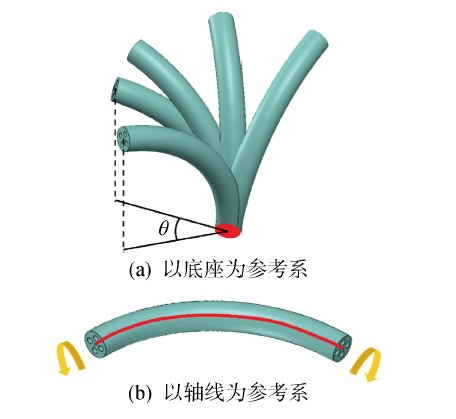

Fig.7
Schematic diagram of forces of straight through actuator during vertical pipe climbing movement
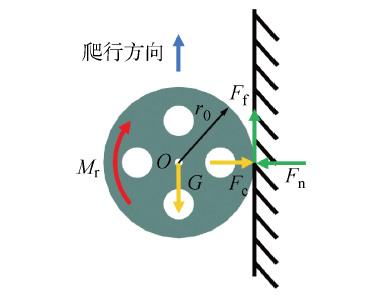
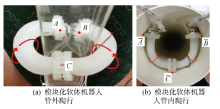
Fig.8
Schematic diagram of dual modular soft robot climbing
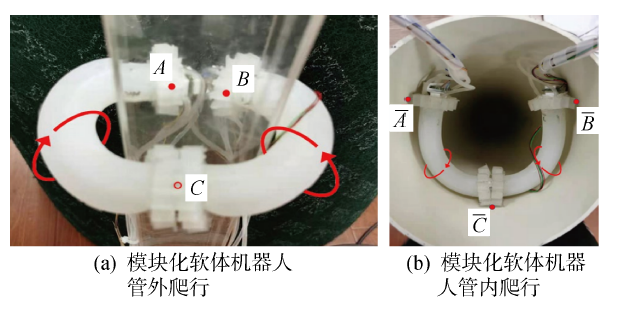
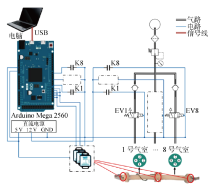
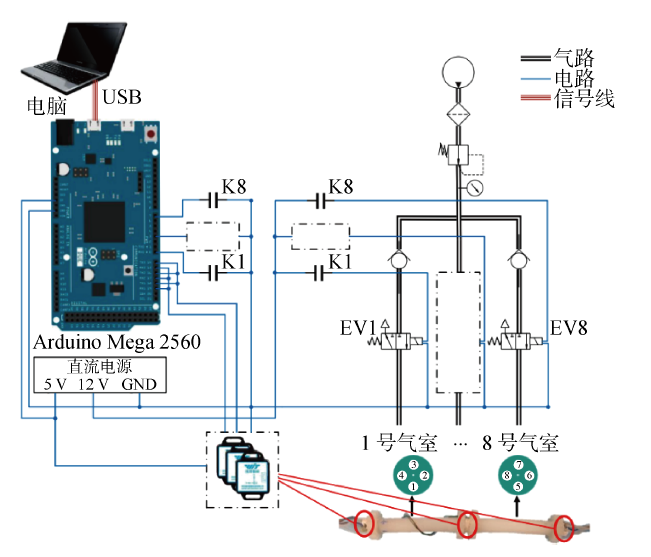
Fig.9
Control system of dual modular soft robot
Tab.1
Performance parameters of SMC S070C-5DC-32
| 参数 | 取值 |
|---|---|
| Ue/V | DC 24 |
| pmax/kPa | 500 |
| mSMC/g | 5 |
| PSMC/ W | 0.5 |
| t1/ms | <3 |
| t2/ms | <3 |

Fig.10
Bending angle versus duty ratio
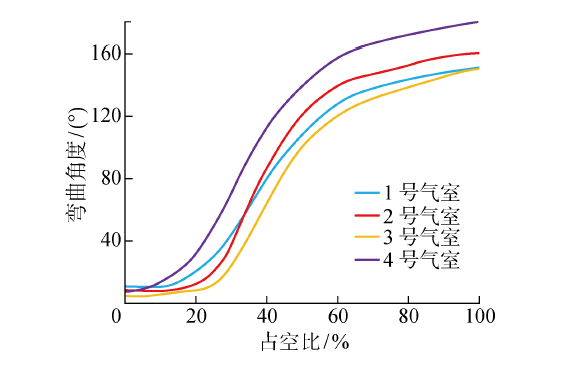
Fig.11
Air chamber inflation and deflation pattern of pipe-climbing gait
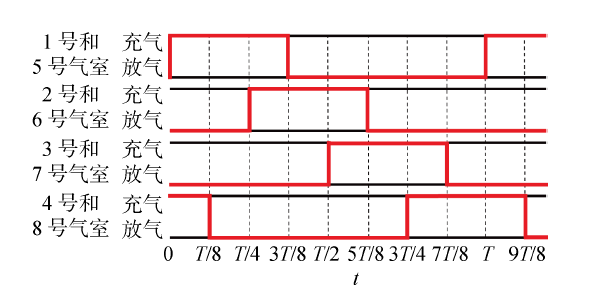
Fig.12
Schematic diagram of bending angle and direction of dual modular soft robot under gait control strategy
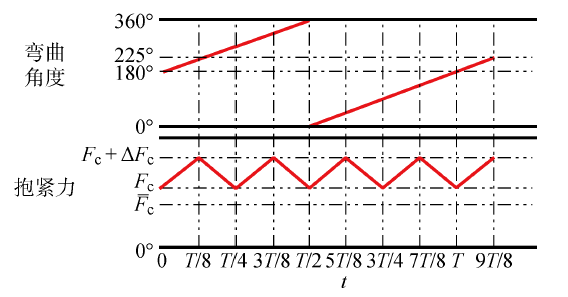

Fig.13
Turning movement process of dual modular soft robot
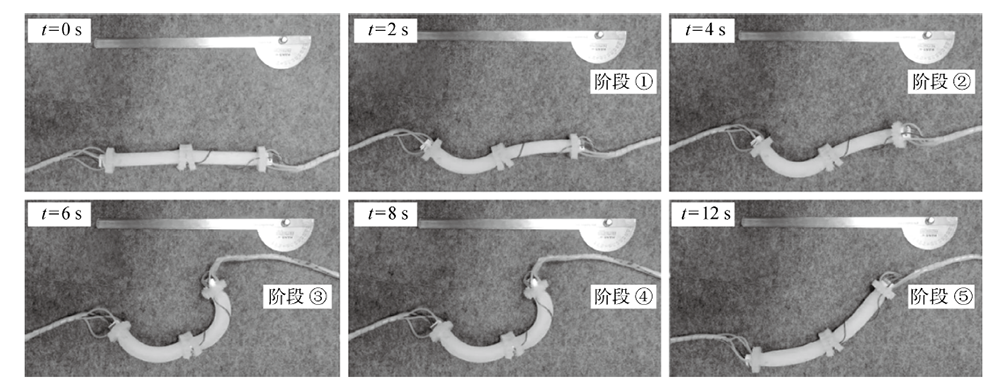
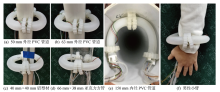
Fig.14
Experiment of vertical climbing
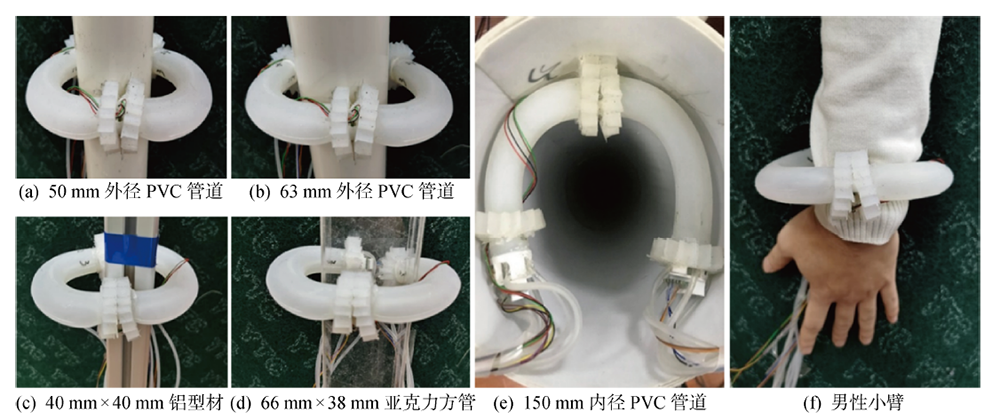
Tab.2
Vertical movement speed in different climbing environments
| 不同攀爬环境 | 移动速度/(mm·s-1) | 不同攀爬环境 | 移动速度/(mm·s-1) |
|---|---|---|---|
| 50 mm外径PVC管道 | 6.5 | 66 mm×38 mm亚克力方管 | 8.6 |
| 63 mm外径PVC管道 | 8.1 | 150 mm内径PVC管道 | 6.8 |
| 40 mm×40 mm铝型材 | 5.4 | 男性小臂 | 11.7 |

Fig.15
Process of slope-climbing
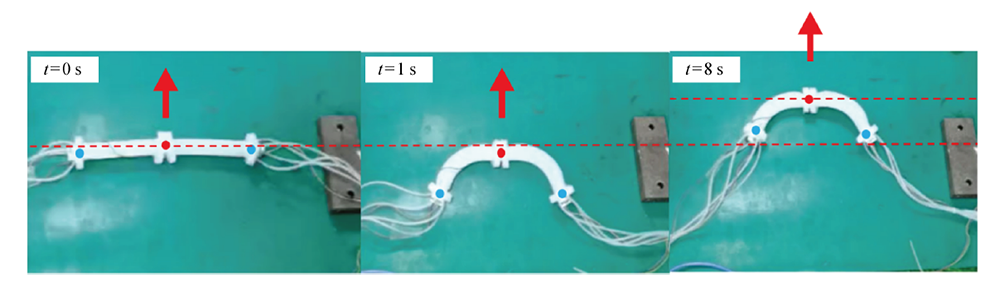

Fig.16
Movement test on gravel road

Fig.17
Creep process on gravel pavement
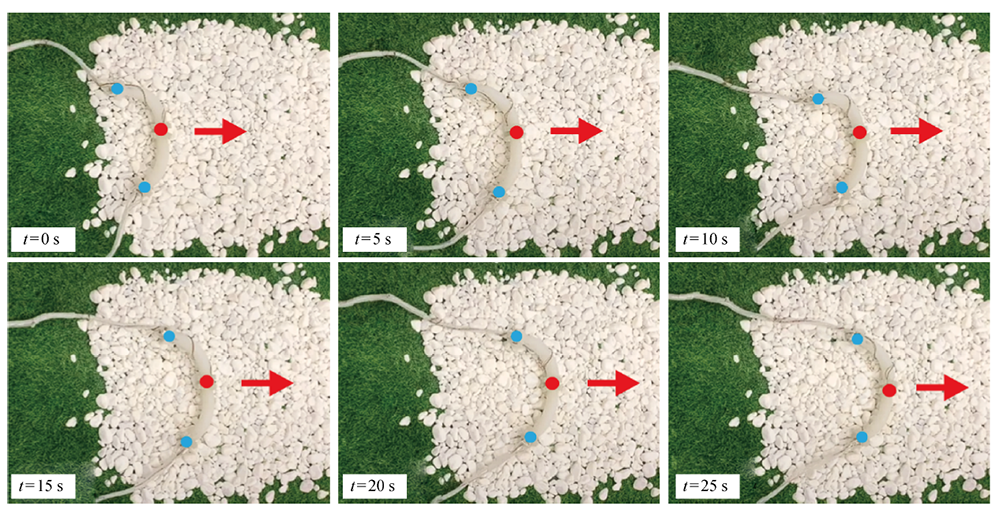
Tab.3
Movement speed in different terrains
| 不同地形 | 移动速度/(mm·s-1) |
|---|---|
| 人造草皮 | 6.5 |
| 木地板 | 8.1 |
| 6~9 mm碎石路面 | 8.6 |
| 10~20 mm碎石路面 | 5.4 |
| [1] |
XU F Y, JIANG F Y, JIANG Q S, et al. Soft actuator model for a soft robot with variable stiffness by coupling pneumatic structure and jamming mechanism[J]. IEEE Access, 2020, 8: 26356-26371.
doi: 10.1109/ACCESS.2020.2968928 URL |
| [2] | KALı N M A İ, AYGÜ L C, TÜRKMEN A,et al. Design, fabrication, and locomotion analysis of an untethered miniature soft quadruped, squad[J]. Robotics and Automation Letters, 2020, 5(3): 3854-3860 |
| [3] |
BAO J L, CHEN W H, XU J. Kinematics modeling of a twisted and coiled polymer-based elastomer soft robot[J]. IEEE Access, 2019, 7: 136792-136800.
doi: 10.1109/ACCESS.2019.2942486 URL |
| [4] | XU J J, LIU B, LI K J, et al. Design and structure analysis of multi-legged bionic soft robot[C]//2020 International Conference on Advanced Mechatronic Systems. Hanoi, Vietnam: IEEE, 2020: 180-185. |
| [5] | LU X J, WANG K, HU T T. Development of an annelid-like peristaltic crawling soft robot using dielectric elastomer actuators[J]. Bioinspiration & Biomimetics, 2020, 15(4): 046012. |
| [6] |
LI C, LAU G C, YUAN H, et al. Fast and programmable locomotion of hydrogel-metal hybrids under light and magnetic fields[J]. Science Robotics, 2020, 5(49): eabb9822.
doi: 10.1126/scirobotics.abb9822 URL |
| [7] |
ZHANG Z Y, WANG X Q, WANG S T, et al. Design and modeling of a parallel-pipe-crawling pneumatic soft robot[J]. IEEE Access, 2019, 7: 134301-134317.
doi: 10.1109/ACCESS.2019.2941502 |
| [8] |
YEH C Y, CHEN C Y, JUANG J Y. Soft hopping and crawling robot for in-pipe traveling[J]. Extreme Mechanics Letters, 2020, 39: 100854.
doi: 10.1016/j.eml.2020.100854 URL |
| [9] | 王羽麟. 可重构软体模块化机器人研制及其运动控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| WANG Yulin. Development and motion control strategy research of soft reconfigurable modular robots[D]. Harbin:Harbin Institute of Technology, 2018. | |
| [10] | YAMADA S, HIROSE S, ENDO G, et al. R-Crank: Amphibious all terrain mobile robot[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon, Korea (South): IEEE, 2016: 1067-1072. |
| [11] | DROTMAN D, JADHAV S, KARIMI M, et al. 3D printed soft actuators for a legged robot capable of navigating unstructured terrain[C]//2017 IEEE International Conference on Robotics and Automation. Jeju, Korea (South): IEEE, 2017: 5532-5538. |
| [12] | HAN S C, AN J, MOON H. A remotely controlled out-pipe climbing robot[C]//2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence. Jeju, Korea (South): IEEE, 2013: 126. |
| [1] | MA Zhoujun, WANG Yong, WANG Jie, CHEN Shaoyu. A Dual Cooperative Optimization for Optimal Redundancy Quantity of MMC Submodules of Flexible Controller [J]. Journal of Shanghai Jiao Tong University, 2022, 56(3): 325-332. |
| [2] | GAN Yaokai (干耀恺), DAI Kerong (戴尅戎), LI Jianying (李健瑛), SHI Dingwei (史定伟), SHEN Lu (沈陆), JIANG Wenbo (姜闻博). Total Talar Replacement Using a Novel 3D-Printed Prosthesis for Recurrent Giant Cell Tumour of the Talus [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(3): 391-397. |
| [3] | LIU Jiapeng, WANG Jiangbei, DING Ye, FEI Yanqiong. Self-Reconfiguration Sequence of Lattice Modular Soft Robots [J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 111-116. |
| [4] | ZHANG Liwen, XU Qiping, LIU Jinyang. Modeling and Simulation of an Inchworm-Like Soft Robot [J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 149-160. |
| [5] | LI Yong, ZHANG Mengjun, QIU Dong, FAN Yunfeng . Design and Development of Data-Driven Augmented Reality Electronic Sand Table for Command and Control System [J]. Air & Space Defense, 2021, 4(2): 27-. |
| [6] | YI Canming,YU Haidong,WANG Hao. Dynamic Behavior of Coupled Flexible Plate Structure with Piezoelectric Actuator via Absolute Nodal Coordinate Formulation [J]. Journal of Shanghai Jiaotong University, 2019, 53(6): 665-672. |
| [7] | HE Yuntao1,KONG Bo2,3,XI Xiaobing2,3,LUO Yun1. Design and Evaluation of a Novel Splint Used in Distal Radius Fracture [J]. Journal of Shanghai Jiaotong University, 2018, 52(2): 194-199. |
| [8] | XI Xinze,HUANG Wentao,TAI Nengling. Modeling and Digital Simulation of DC Step-Up Collection System for Large-Scale Photovoltaic Power Plants [J]. Journal of Shanghai Jiaotong University, 2018, 52(10): 1178-1188. |
| [9] | WANG Jiangbei,FANG Yeyang,TONG Xin,ZHANG Shuai,FEI Yanqiong. Design and Locomotion Properties of a Multi-Airbag Bionic Soft Robot [J]. Journal of Shanghai Jiaotong University, 2018, 52(1): 20-25. |
| [10] |
LI Yuanchun1,SONG Yang2,ZHAO Bo1,3.
Modular Position/Force Control for Environmental Constrained Reconfigurable Manipulator [J]. Journal of Shanghai Jiaotong University, 2017, 51(6): 709-714. |
| [11] | Xiaodong LUO, Qiang WANG, Liping ZHANG, Yueyue JIANG, Bin HU. Development of Flatness Control Practical Teaching Platform Based on Simulation Technology [J]. Research and Exploration in Laboratory, 2017, 36(5): 114-117. |
| [12] | Yun ZHONG, Yuanyuan LIU. Research on Innovational Curriculum Design of Electronic and Automation Practice [J]. Research and Exploration in Laboratory, 2017, 36(5): 170-173. |
| [13] |
YANG Zhen,FU Zhuang,GUAN Enguang,XU Jiannan,TIAN Shihe,ZHENG Hui.
The Kinematic Analysis and Structure Optimization of MLattice Modular Robot [J]. Journal of Shanghai Jiaotong University, 2017, 51(10): 1153-1159. |
| [14] | MENG Cheng,SU Ming. Performance Simulation of Natural Gas Supply System of a Heavy Duty Gas Turbine [J]. Journal of Shanghai Jiaotong University, 2016, 50(04): 483-489. |
| [15] | BAO Wenlong,YU Yuefeng. Speed Control Modeling of Modular Screw Expander Generation System [J]. Journal of Shanghai Jiaotong University, 2016, 50(04): 521-527. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||