上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (10): 1228-1236.doi: 10.16183/j.cnki.jsjtu.2020.101
所属专题: 《上海交通大学学报》2021年“交通运输工程”专题; 《上海交通大学学报》2021年12期专题汇总专辑
蔡文涛, 王春江( ), 滕念管, 文泉
), 滕念管, 文泉
收稿日期:2020-04-06
出版日期:2021-10-28
发布日期:2021-11-01
通讯作者:
王春江
E-mail:wangchj@sjtu.edu.cn
作者简介:蔡文涛(1994-)男,江苏省南通市人,硕士生,从事磁浮轨道梁耦合的研究.
基金资助:
CAI Wentao, WANG Chunjiang(), TENG Nianguan, WEN Quan
Received:2020-04-06
Online:2021-10-28
Published:2021-11-01
Contact:
WANG Chunjiang
E-mail:wangchj@sjtu.edu.cn
摘要:
轨道梁是磁浮交通线路中非常重要的结构部件,对其结构性能的分析,特别是针对其在高速运动列车作用下的耦合动力分析非常关键,与列车的运行安全性以及稳定性直接相关.针对 600 km/h 超高速磁浮轨道梁的动力耦合进行研究,基于5刚体30自由度车辆模型和考虑剪切影响的Timoshenko空间梁单元模型,建立了磁浮轨道梁的空间耦合分析模型.在跨平台耦合分析框架的搭建中,采用多体动力学软件Simpack,大型有限元软件ANSYS和可视化仿真工具MATLAB/Simulink联合建模方法,并引入PID控制器对整个悬浮控制系统进行主动控制,将整个系统划分为车辆主系统、控制器子系统以及轨道梁-桥墩子系统,建立了磁浮列车-控制器-轨道梁耦合振动模型.以24.768 m跨度的简支桥梁为例,研究了超高速磁浮列车运行时列车、轨道梁的竖向动力响应,并评估了控制系统的动态性能,给出了考虑桥墩参振影响的多参数动力响应变化规律,可为未来超高速磁浮工程的建设提供技术支撑.
中图分类号:
蔡文涛, 王春江, 滕念管, 文泉. 超高速磁浮轨道梁体系的跨平台耦合振动分析[J]. 上海交通大学学报, 2021, 55(10): 1228-1236.
CAI Wentao, WANG Chunjiang, TENG Nianguan, WEN Quan. Analysis of Cross-Platform Coupling Vibration of Ultra-High-Speed Maglev Track Beam System[J]. Journal of Shanghai Jiao Tong University, 2021, 55(10): 1228-1236.
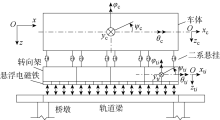
图1
磁浮系统模型
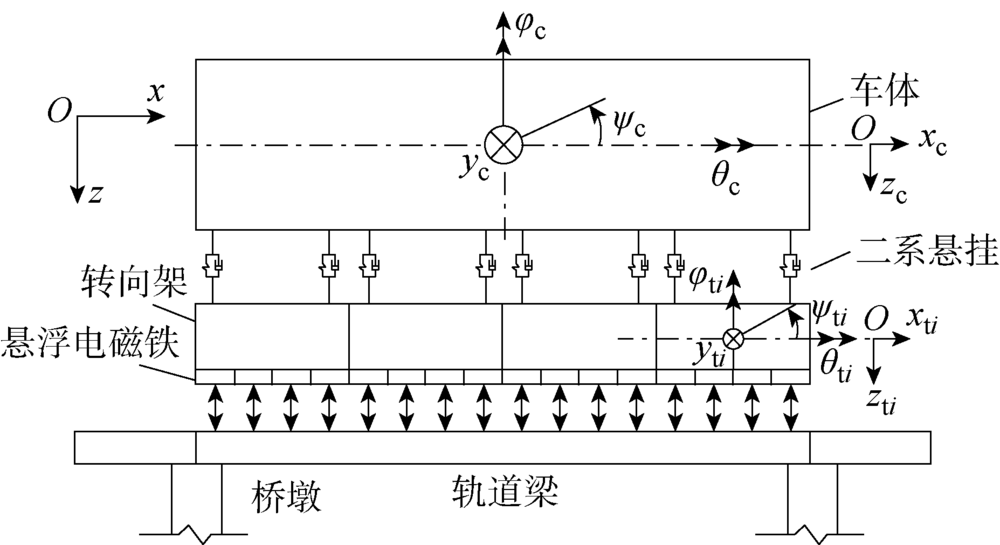
表1
磁浮列车动力学模型自由度
| 自由度 | 伸缩 | 横摆 | 沉浮 | 侧滚 | 点头 | 摇头 |
|---|---|---|---|---|---|---|
| 车体 | xc | yc | zc | θc | Ψc | φc |
| 转向架(i=1~4) | xti | yti | zti | θti | Ψti | φti |
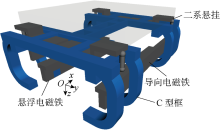
图2
转向架示意图

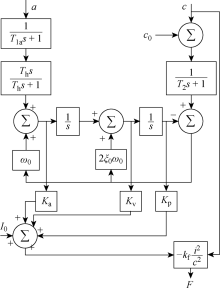
图3
控制器流程
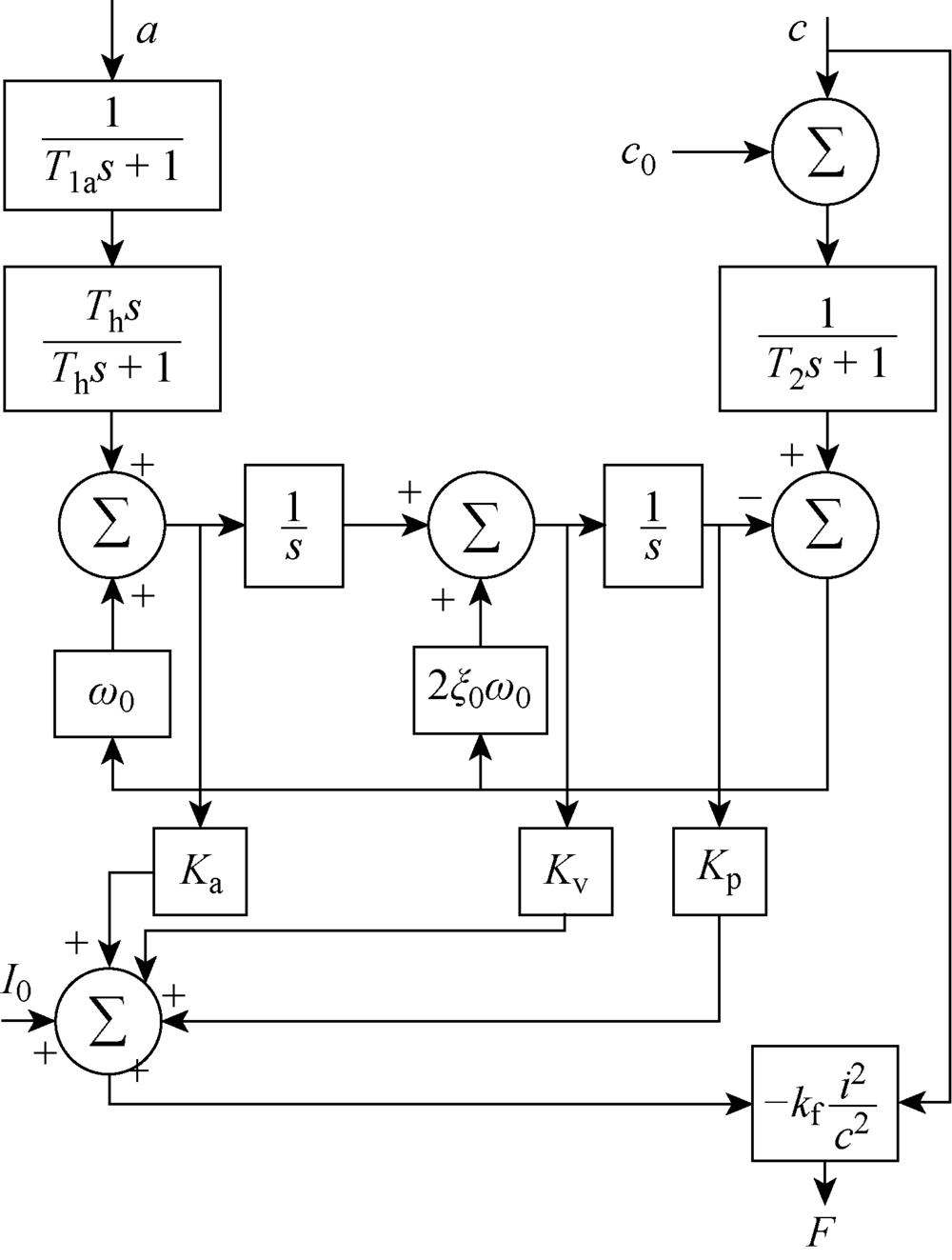
图4
轨道梁和桥墩截面
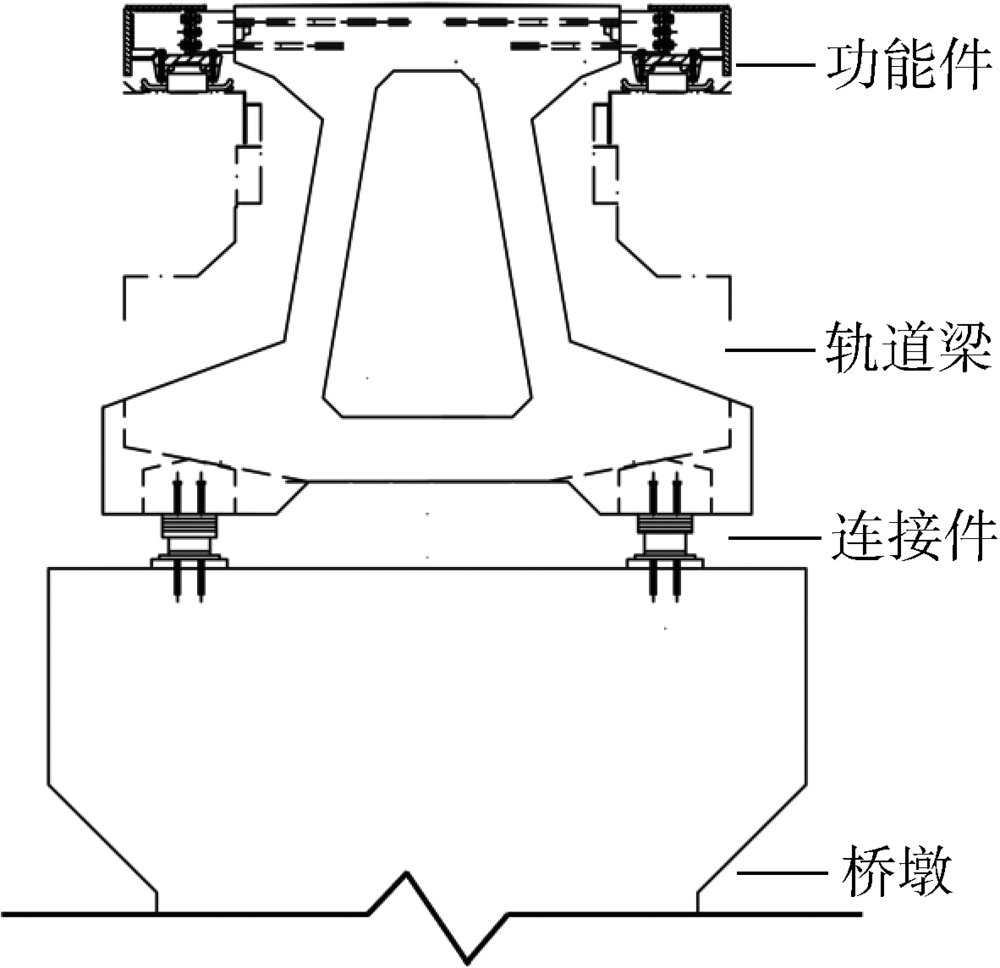
表2
轨道梁和桥墩参数
| 符号 | 物理意义 | 数值 |
|---|---|---|
| A/m2 | 梁截面面积 | 2.998 |
| EbIz/(N·m2) | 梁竖向刚度 | 9.766×1010 |
| EbIy/(N·m2) | 梁横向刚度 | 8.736×1010 |
| | 梁单位长度质量 | 7.795×103 |
| h/m | 桥墩高度 | 6 |
| Ec/(N·m-2) | 混凝土弹性模量 | 3.6×1010 |
| ρ/(kg·m-2) | 混凝土密度 | 2.6×103 |
表3
模态分析结果
| 阶数 | 模态频率/Hz | 模态振型 | |
|---|---|---|---|
| 有桥墩 | 无桥墩 | ||
| 1 | 8.0438 | 8.3517 | 一阶横向弯曲 |
| 2 | 8.8057 | 8.8251 | 一阶竖向弯曲 |
| 3 | 19.4020 | 20.0630 | 横向正对称弯曲,墩横弯 |
| 4 | 22.5520 | 31.1850 | 纵向振动,墩竖弯 |
| 5 | 25.7520 | 33.1170 | 横向反对称弯曲,墩横弯 |
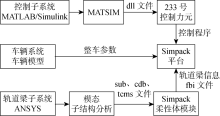
图5
模型仿真流程图
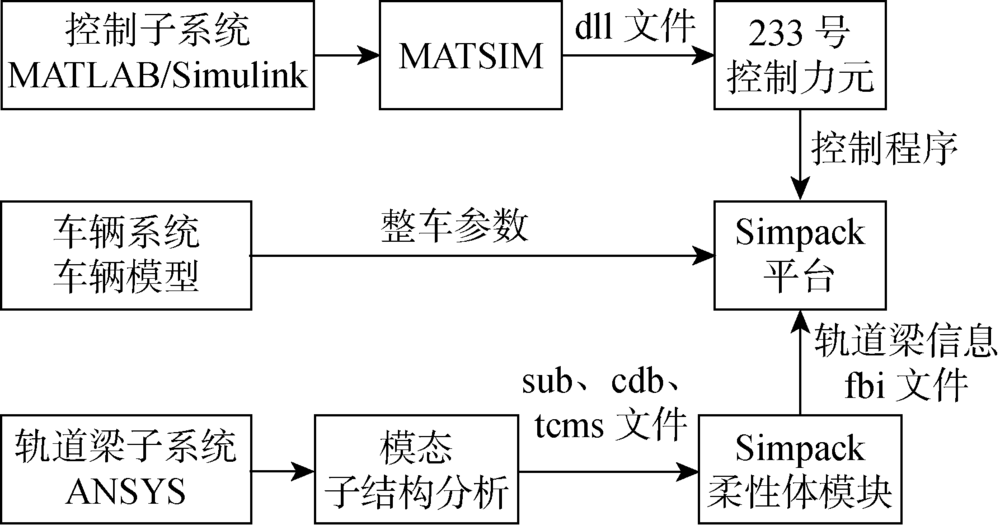
表4
磁浮列车参数
| 参数 | 数值 |
|---|---|
| 车体质量(满员) | 2.92×104 |
| 车体绕x轴转动惯量/(kg) | 2.1×104 |
| 车体绕y轴转动惯量/(kg·m2) | 1.64×106 |
| 车体绕z轴转动惯量/(kg·m2) | 1.64×106 |
| 转向架总质量/(kg) | 3.2×104 |
| 转向架绕x轴转动惯量/(kg·m2) | 6.95×103 |
| 转向架绕y轴转动惯量/(kg·m2) | 1.2×104 |
| 转向架绕z轴转动惯量/(kg·m2) | 7.72×103 |
| 二系悬挂刚度/(N·m-1) | 6.812×105 |
| 二系悬挂阻尼/(N·s·m-1) | 8.46×104 |
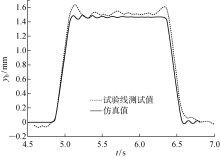
图6
实测结果与仿真结果对比
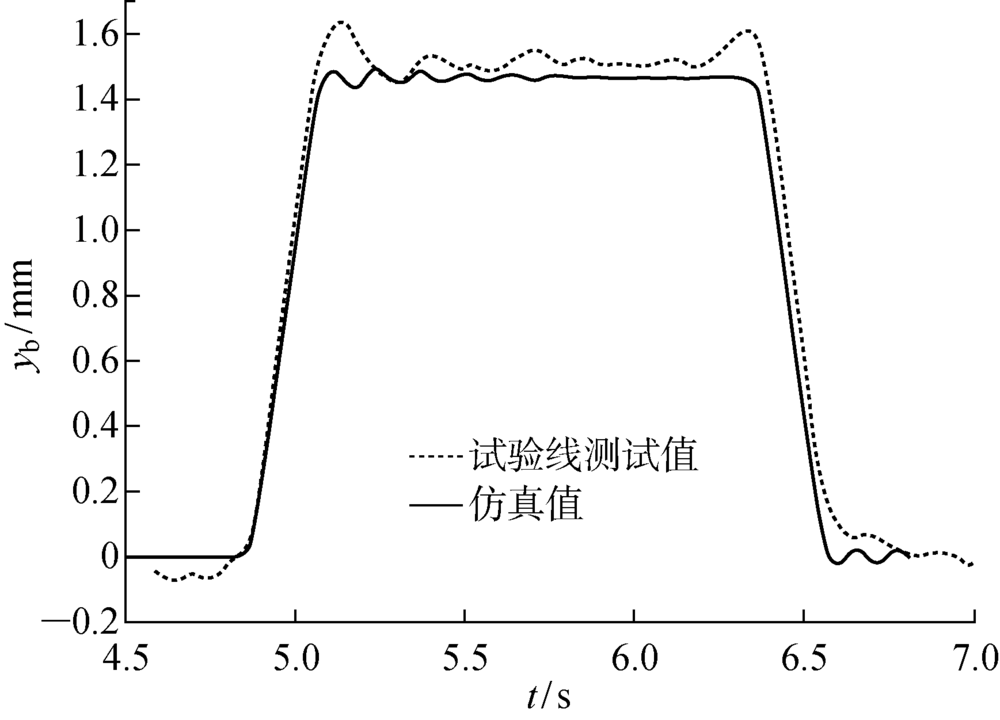
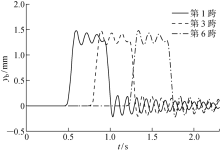
图7
轨道梁跨中竖向位移时程曲线
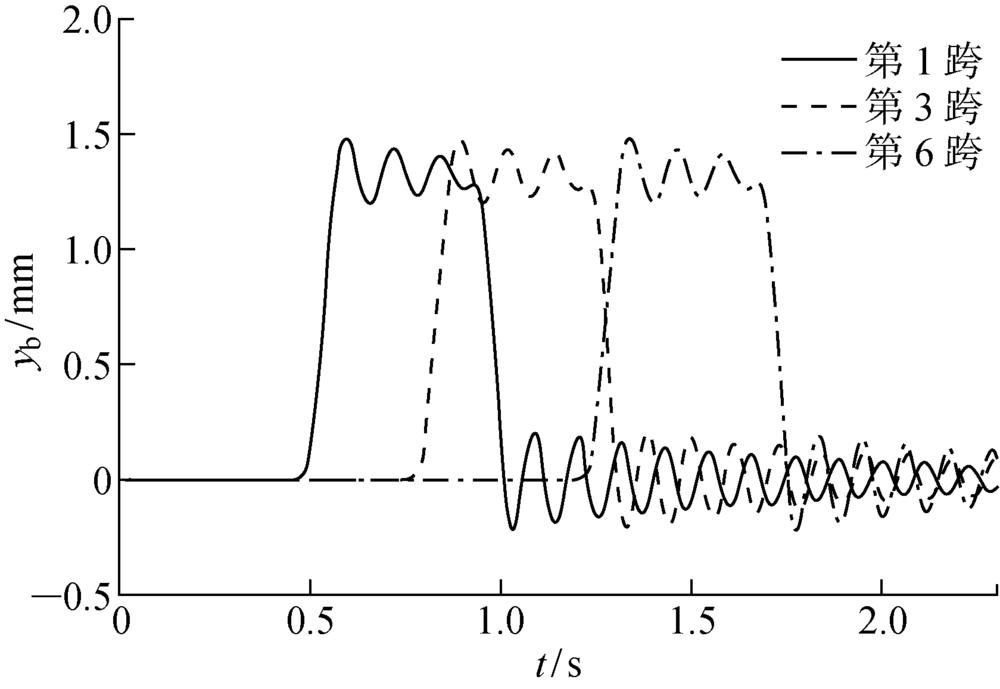
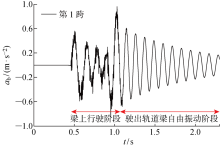
图8
轨道梁跨中竖向加速度时程曲线
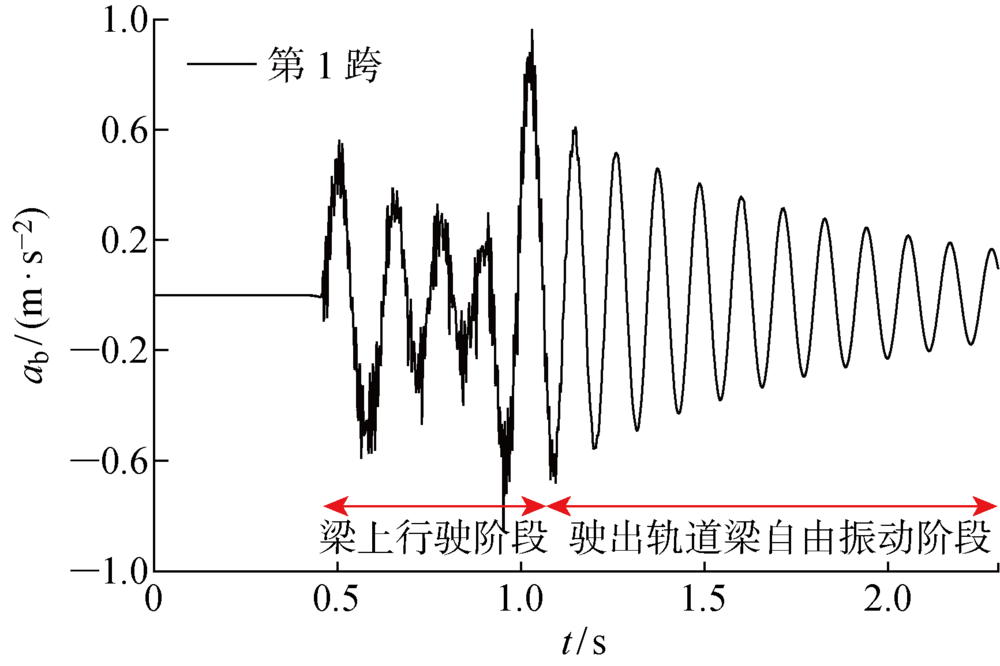
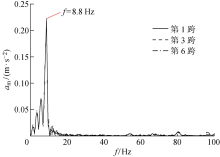
图9
轨道梁跨中竖向加速度频谱
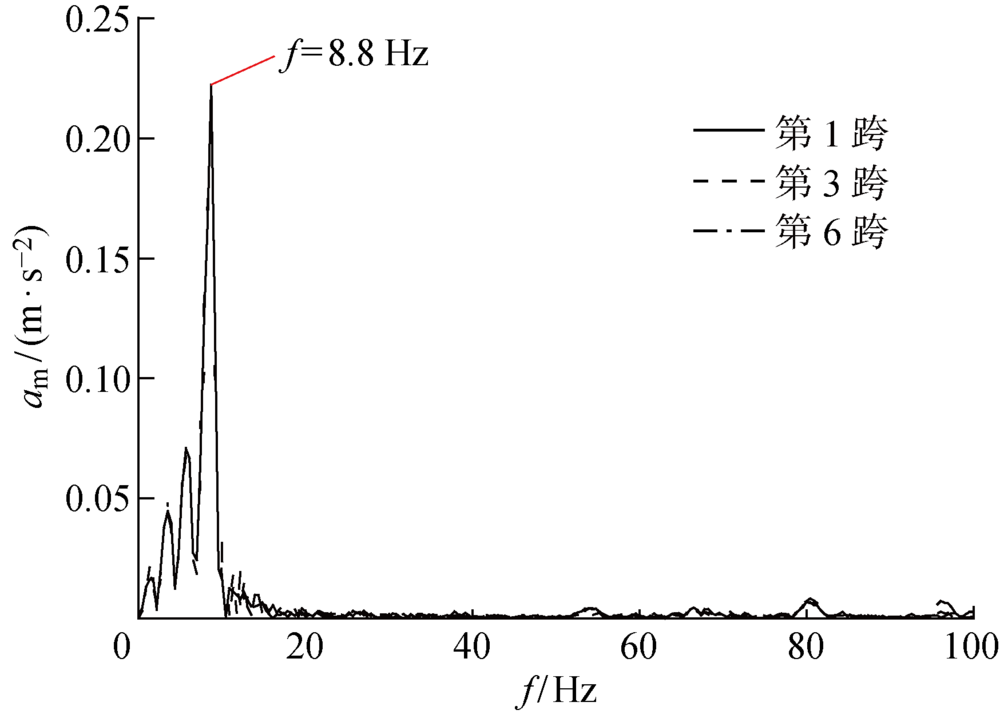
图10
电磁铁悬浮间隙时程曲线
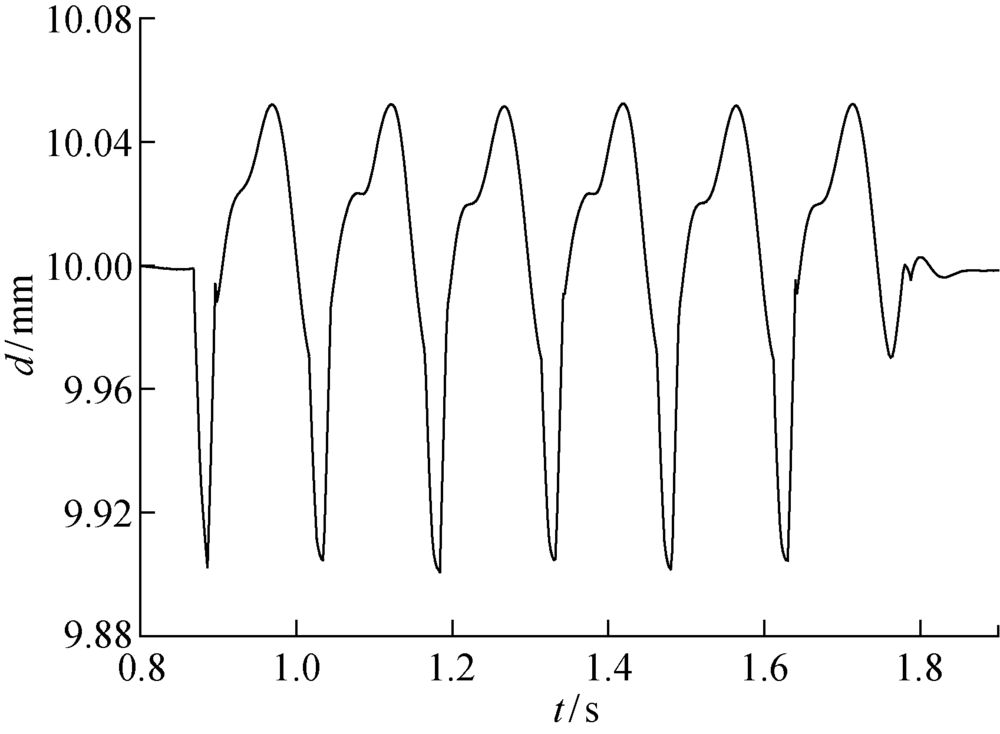
图11
第1节转向架竖向加速度时程曲线
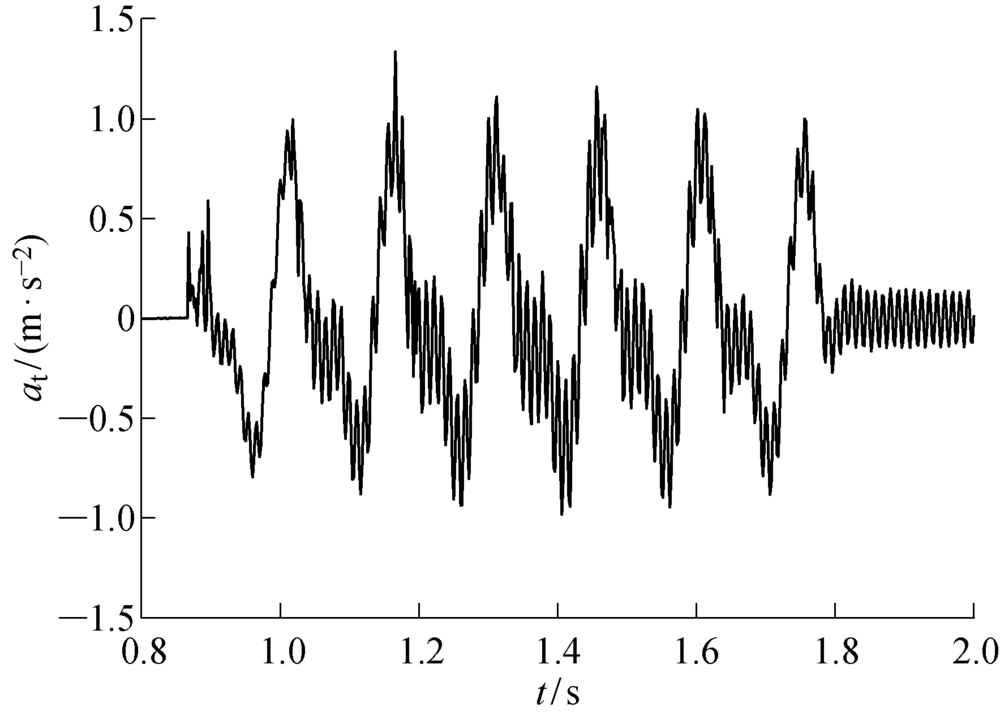
图12
第1节车厢竖向加速度时程曲线
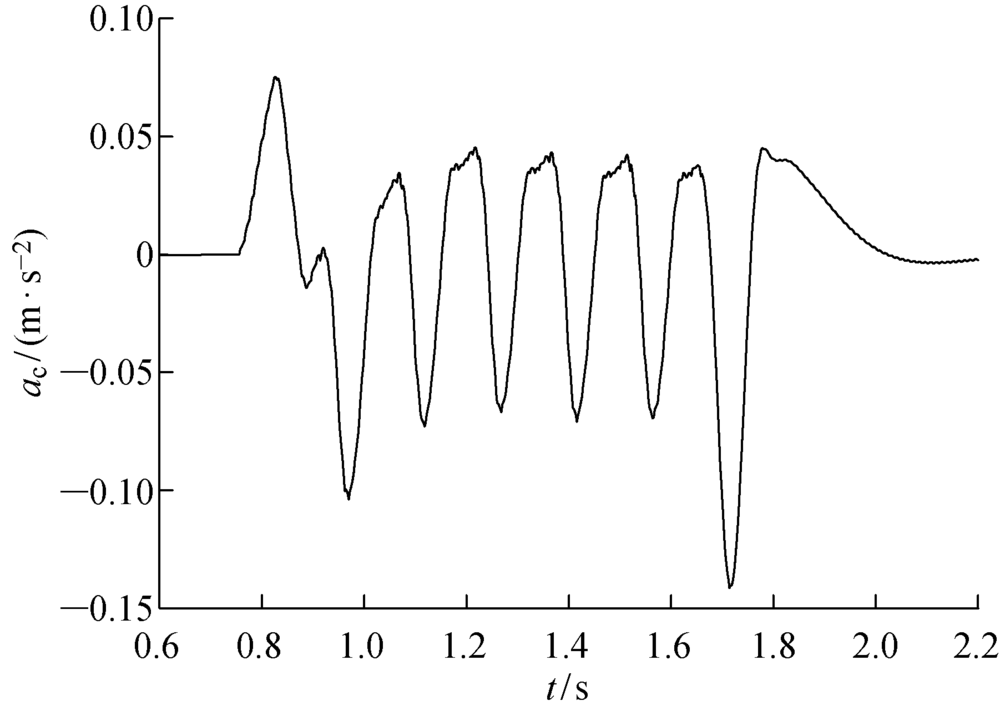
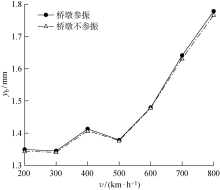
图13
跨中位移随速度变化曲线

图14
不同时速下轨道梁跨中加速度峰值
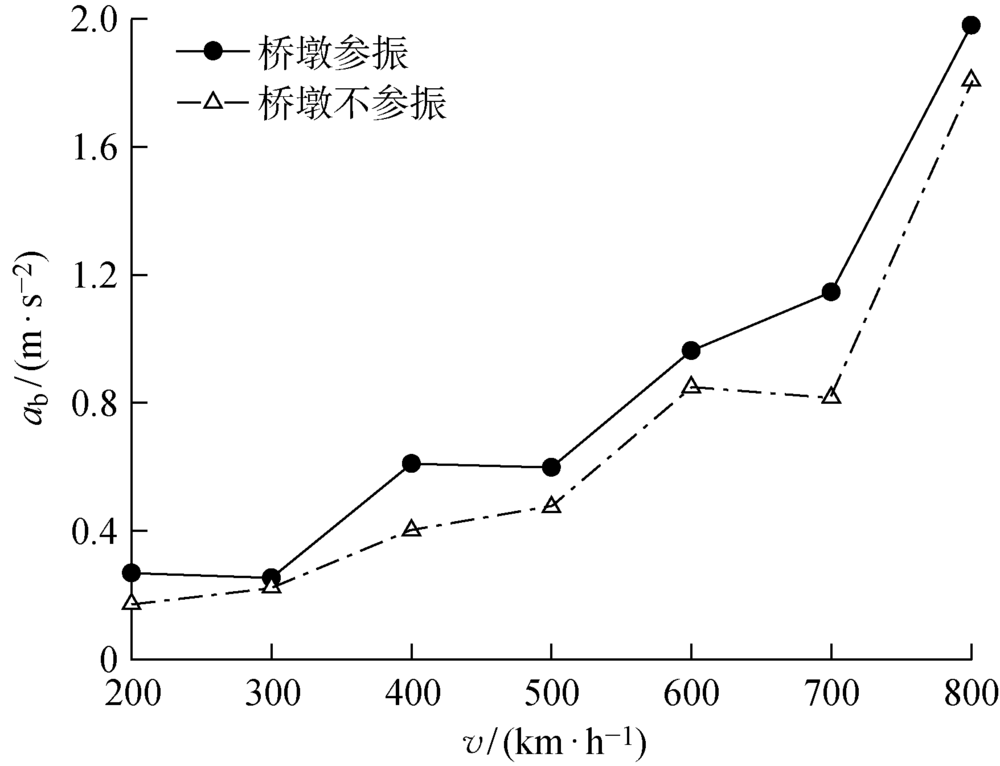
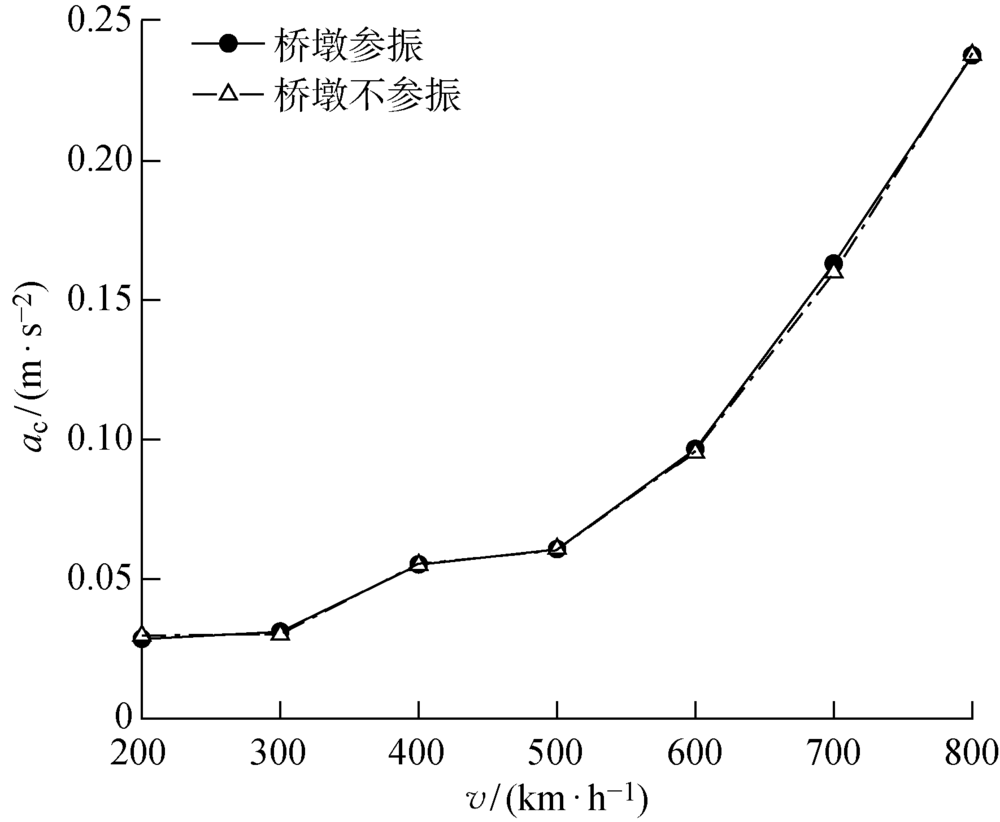
图15
不同时速下中车的车体加速度峰值
| [1] | 鲍佳, 张昆仑. 单磁铁电磁悬浮系统研究[J]. 计算机测量与控制, 2003, 11(11):863-865. |
| BAO Jia, ZHANG Kunlun. Research of electromagnetic suspension system of single magnetic[J]. Computer Automated Measurement & Control, 2003, 11(11):863-865. | |
| [2] | 滕延锋. 高速磁浮轨道梁在车辆荷载作用下的振动研究[D]. 上海:上海交通大学, 2008. |
| TENG Yanfeng. The study of vibration of highspeed maglev guideway interacting with vehicle[D]. Shanghai: Shanghai Jiao Tong University, 2008. | |
| [3] |
TALUKDAR R P, TALUKDAR S. Dynamic analysis of high speed maglev vehicle-guideway system using SIMULINK[J]. Procedia Engineering, 2016, 144:1094-1101.
doi: 10.1016/j.proeng.2016.05.069 URL |
| [4] |
TALUKDAR R P, TALUKDAR S. Dynamic analysis of high-speed maglev vehicle-guideway system: An approach in block diagram environment[J]. Urban Rail Transit, 2016, 2(2):71-84.
doi: 10.1007/s40864-016-0039-8 URL |
| [5] | 刘德军, 李小珍, 洪沁烨, 等. 中低速磁浮列车-大跨度连续梁耦合振动研究[J]. 铁道工程学报, 2017, 34(9):53-57. |
| LIU Dejun, LI Xiaozhen, HONG Qinye, et al. Coupling vibration study of medium-low speed maglev train-long span continuous bridge system[J]. Journal of Railway Engineering Society, 2017, 34(9):53-57. | |
| [6] |
LI X Z, WANG D X, LIU D J, et al. Dynamic analysis of the interactions between a low-to-medium-speed maglev train and a bridge: Field test results of two typical bridges[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2018, 232(7):2039-2059.
doi: 10.1177/0954409718758502 URL |
| [7] |
ZHANG L, HUANG J Y. Dynamic interaction analysis of the high-speed maglev vehicle/guideway system based on a field measurement and model updating method[J]. Engineering Structures, 2019, 180(1):1-17.
doi: 10.1016/j.engstruct.2018.11.031 URL |
| [8] | 德米特里·波戈列洛夫, 雷强, 根纳季·米克希夫, 等. 基于UM的磁浮列车-轨道梁耦合振动仿真程序开发[J]. 计算机辅助工程, 2019, 28(1):28-35. |
| POGORELOV Dmitry, LEI Qiang, MIKHEEV Gennady, et al. Development of dynamics simulation program for coupling vibration of maglev train-track beam based on UM[J]. Computer Aided Engineering, 2019, 28(1):28-35. | |
| [9] | 赵春发. 磁悬浮车辆系统动力学研究[D]. 成都: 西南交通大学, 2002. |
| ZHAO Chunfa. Maglev vehicle system dynamics[D] Chengdu: Southwest Jiaotong University, 2002. | |
| [10] | 倪萍, 许超超, 何军, 等. 超高速磁浮车-轨道梁竖向耦合振动分析[J]. 铁道科学与工程学报, 2019, 16(6):1361-1368. |
| NI Ping, XU Chaochao, HE Jun, et al. Vertical coupling vibration analysis of ultra high-speed maglev vehicle guideway[J]. Journal of Railway Science and Engineering, 2019, 16(6):1361-1368. | |
| [11] | 李倩, 黄海于, 冯洋, 等. 磁浮交通系统动力学分布式协同仿真接口的设计与实现[J]. 计算机应用, 2019, 39(Sup.1):164-167. |
| LI Qian, HUANG Haiyu, FENG Yang, et al. Design and implementation of distributed collaborative simulation interface for maglev transport system dynamics[J]. Journal of Computer Applications, 2019, 39(Sup.1):164-167. | |
| [12] | 时瑾, 魏庆朝, 吴范玉. 高速磁浮铁路轨道梁振动分析及控制研究[J]. 中国安全科学学报, 2003, 13(10):76-80. |
| SHI Jin, WEI Qingchao, WU Fanyu. Study on vibration of the beam of magnetic levitation express railway and its control[J]. China Safety Science Journal, 2003, 13(10):76-80. | |
| [13] | 梁鑫, 罗世辉, 马卫华, 等. 磁浮列车单铁悬浮车桥耦合振动分析[J]. 交通运输工程学报, 2012, 12(2):32-37. |
| LIANG Xin, LUO Shihui, MA Weihua, et al. Coupling vibration analysis of single-magnet suspension vehicle-bridge for maglev train[J]. Journal of Traffic and Transportation Engineering, 2012, 12(2):32-37. |
| [1] | 陈琦,李格伦. 新型布缆船拖曳绞车控制系统[J]. 上海交通大学学报, 2019, 53(8): 990-999. |
| [2] | 杨广军,黄醒春,李广慧,郭昊. 预制式轨道板的纵向布置对无碴轨道振动特性的影响[J]. 上海交通大学学报(自然版), 2010, 44(06): 812-0815. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 497
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 696
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||