上海交通大学学报 ›› 2023, Vol. 57 ›› Issue (8): 1016-1027.doi: 10.16183/j.cnki.jsjtu.2022.039
所属专题: 《上海交通大学学报》2023年“船舶海洋与建筑工程”专题; 《上海交通大学学报》2023年“机械与动力工程”专题
苏怡仪1, 徐齐平2, 刘锦阳1( )
)
收稿日期:2022-02-22
修回日期:2022-07-09
接受日期:2022-07-21
出版日期:2023-08-28
发布日期:2023-08-31
通讯作者:
刘锦阳,教授,电话(Tel.):021-34206489;E-mail:作者简介:苏怡仪(1998-),硕士生,研究方向为多体系统动力学.
基金资助:
SU Yiyi1, XU Qiping2, LIU Jinyang1()
Received:2022-02-22
Revised:2022-07-09
Accepted:2022-07-21
Online:2023-08-28
Published:2023-08-31
摘要:
针对气动齿状软体驱动器,从腔室侧壁膨胀角和驱动器弯曲角度的非线性几何关系出发,基于虚功原理和Neo-Hookean超弹性不可压缩材料的非线性本构关系,建立了同时考虑底层、侧壁、前后壁应变能的准静态力学模型.该模型考虑了几何非线性和材料非线性,能够准确高效求解不同驱动气压和末端载荷作用下的软体驱动器构型.在此基础上利用Abaqus软件对固支-自由软体驱动器进行有限元仿真,并搭建了相应的实验装置,对不同气压作用下的驱动器进行了仿真分析和实验研究.结果表明:驱动气压与软体驱动器的弯曲角度呈线性相关,且理论模型的预测结果与有限元仿真和实验结果基本吻合.此外,分析了软体驱动器各部位的应变能分布情况.针对驱动器受末端载荷的变曲率情况,基于分段等曲率模型得到的构型与Abaqus基本一致.该准静态建模方法为同类软体驱动器的结构优化设计、性能改善和运动控制建立理论基础.
中图分类号:
苏怡仪, 徐齐平, 刘锦阳. 气动齿状软体驱动器的理论建模、仿真分析及实验研究[J]. 上海交通大学学报, 2023, 57(8): 1016-1027.
SU Yiyi, XU Qiping, LIU Jinyang. Theoretical Modeling, Simulation Analysis, and Experimental Investigation of a Pneumatic Toothed Soft Actuator[J]. Journal of Shanghai Jiao Tong University, 2023, 57(8): 1016-1027.
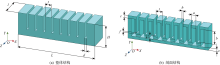
图1
气动齿状软体驱动器的结构
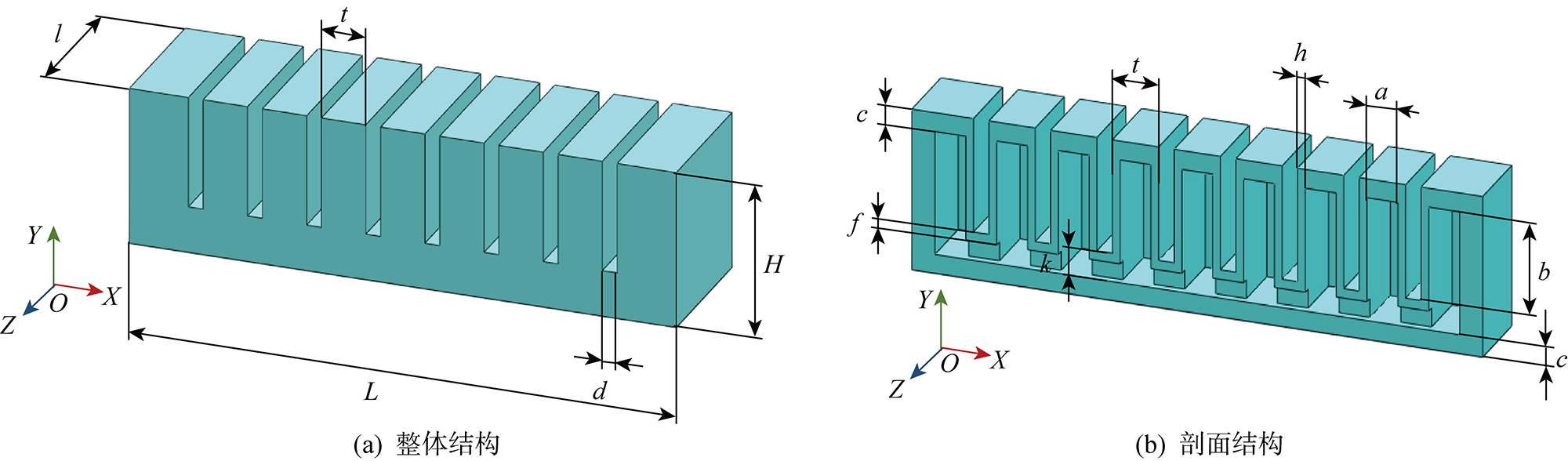

图2
气动齿状软体驱动器的模具
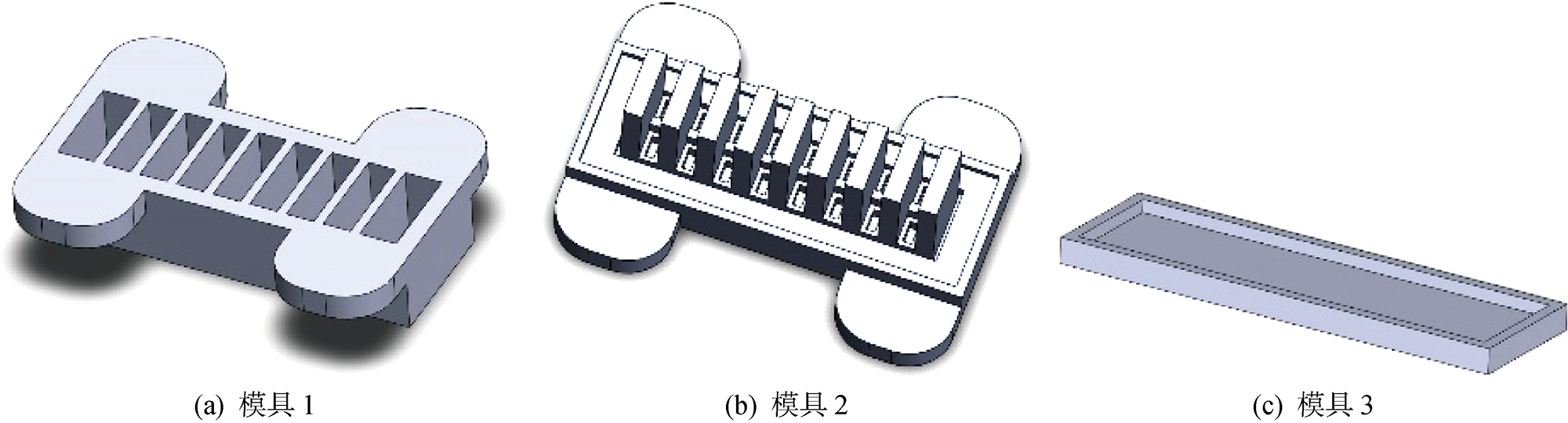

图3
软体驱动器的底层构型示意图
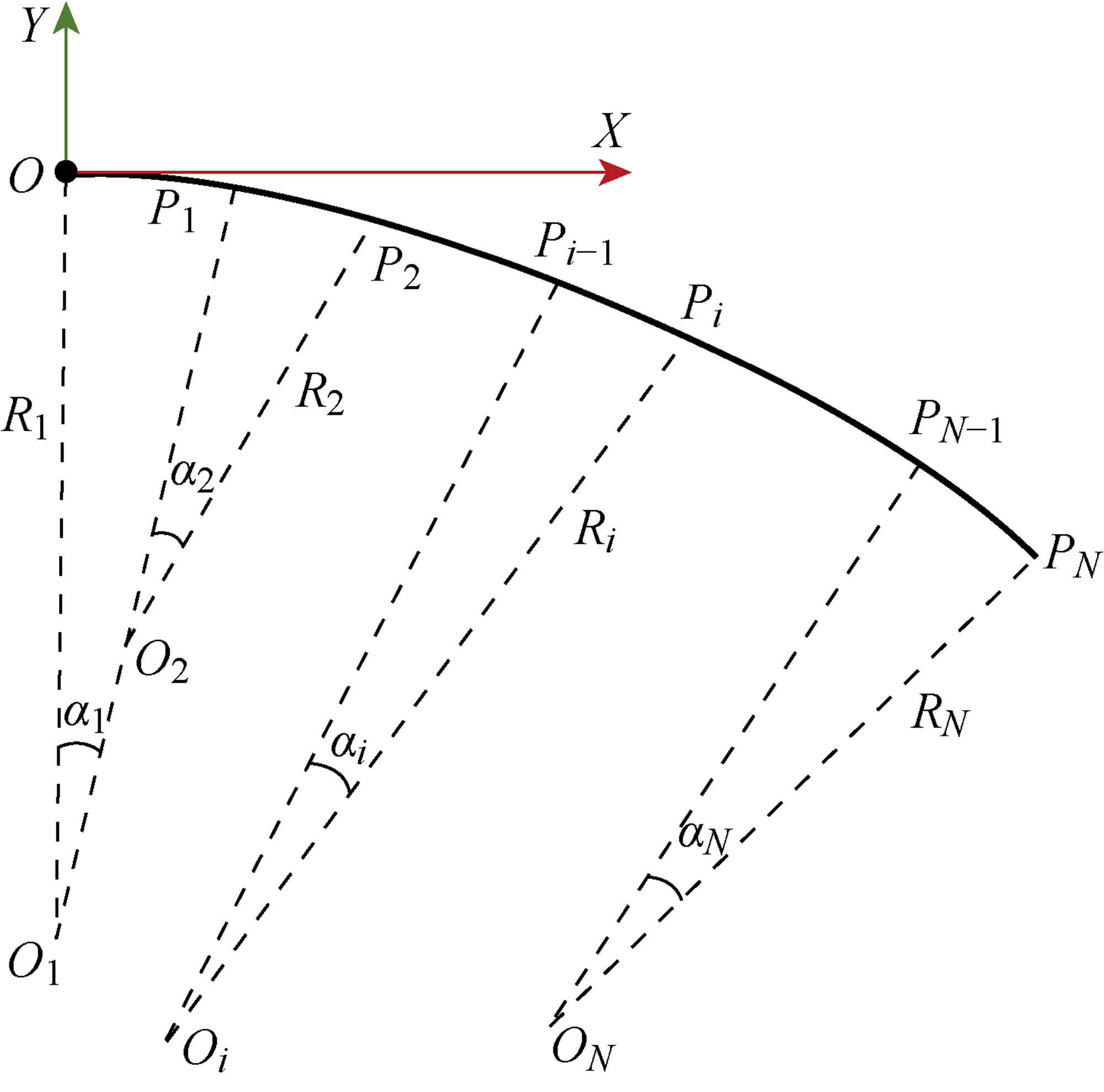

图4
腔室的截面示意图
图5
软体驱动器的弯曲形状
图6
气动齿状软体驱动器有限元离散


图7
有限元模型的计算结果(von Mises应力分布)
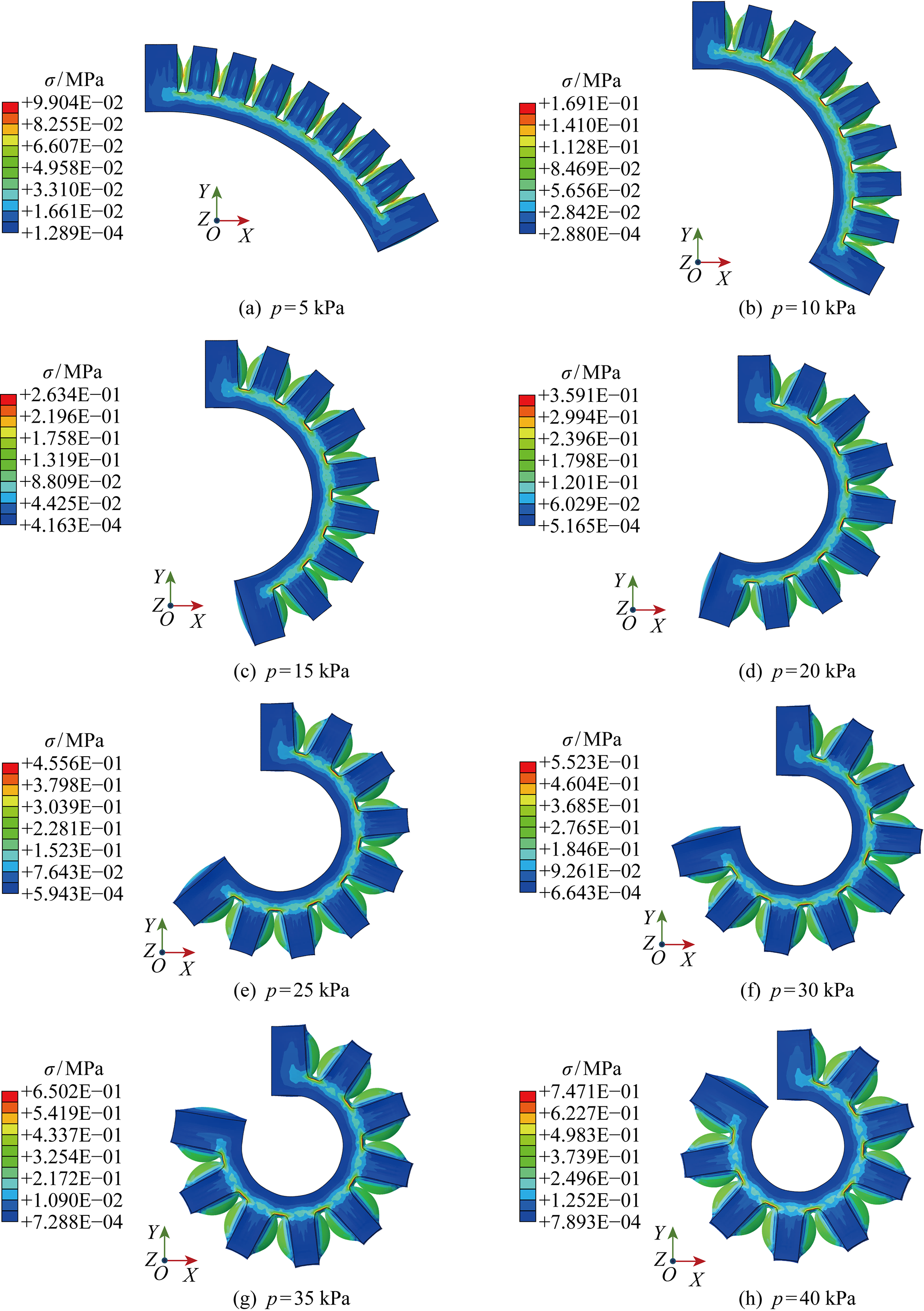

图8
p=35 kPa局部应力和应变
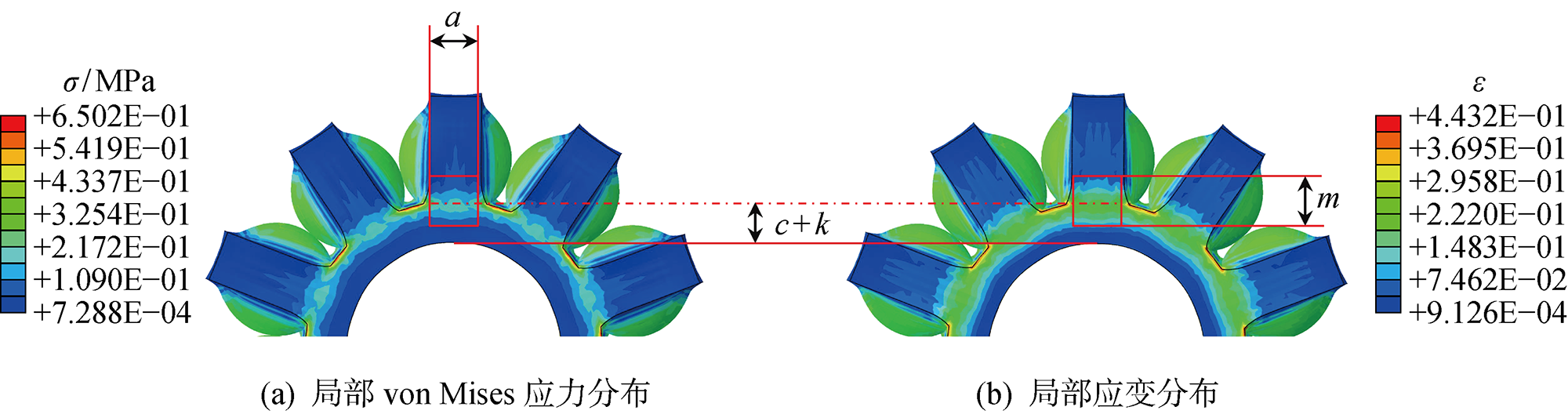
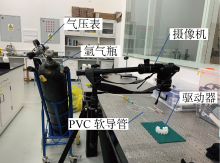
图9
实验平台示意图


图10
实验变形结果
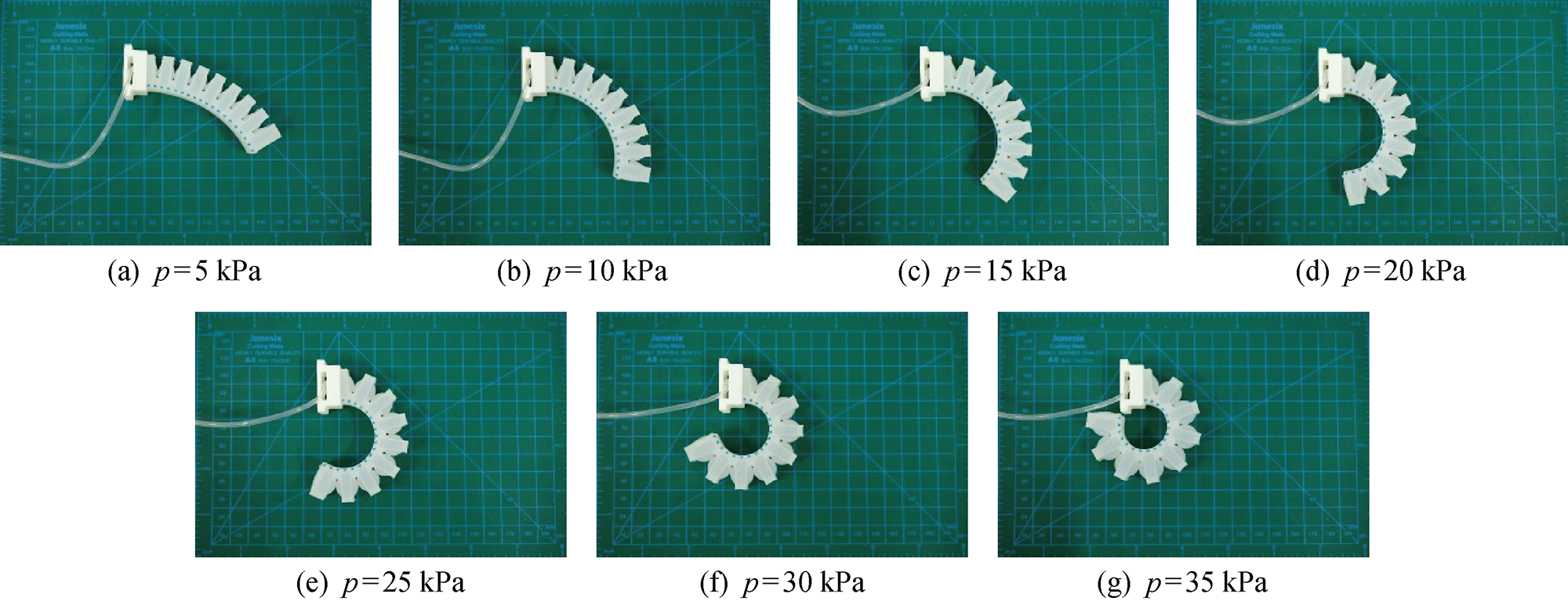

图11
理论结果、实验数据、仿真结果的对比

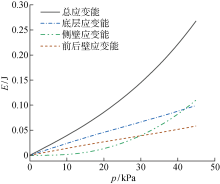
图12
应变能分布与气压值之间的关系曲线


图13
不同模型弯曲构型与实验数据的对比
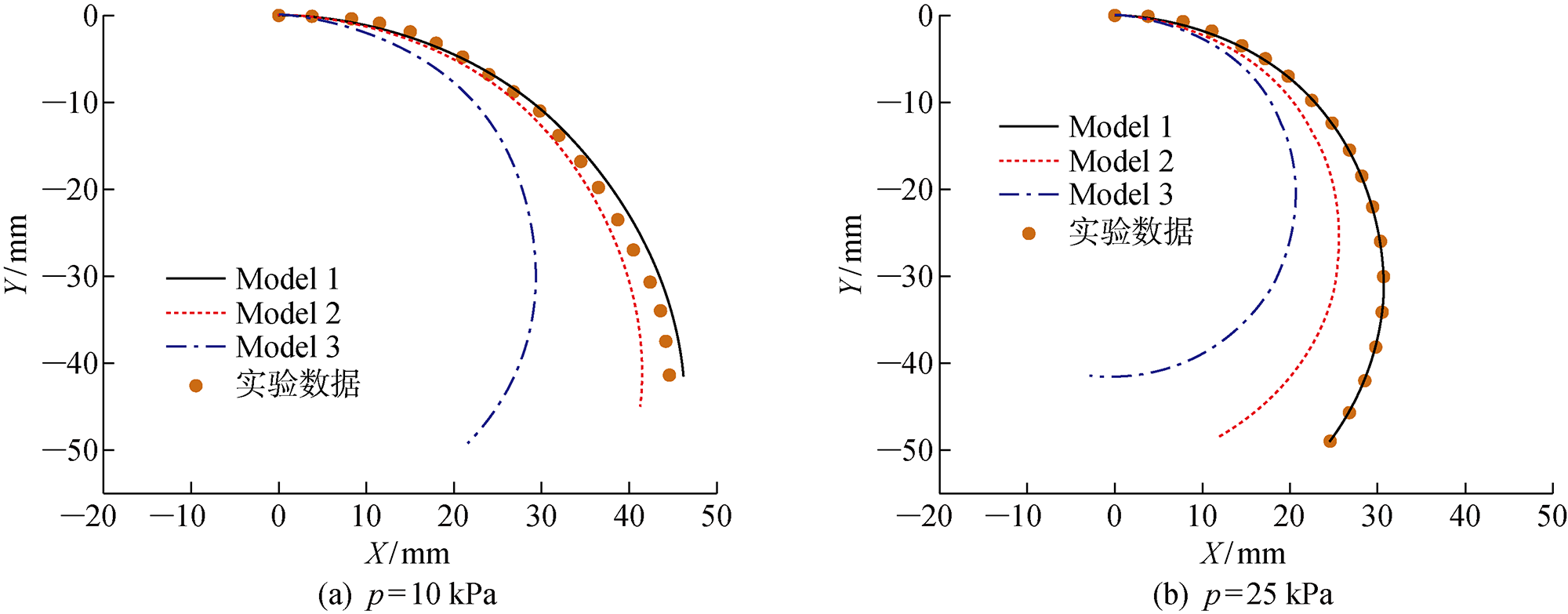

图14
Model 1与实验的构型对比
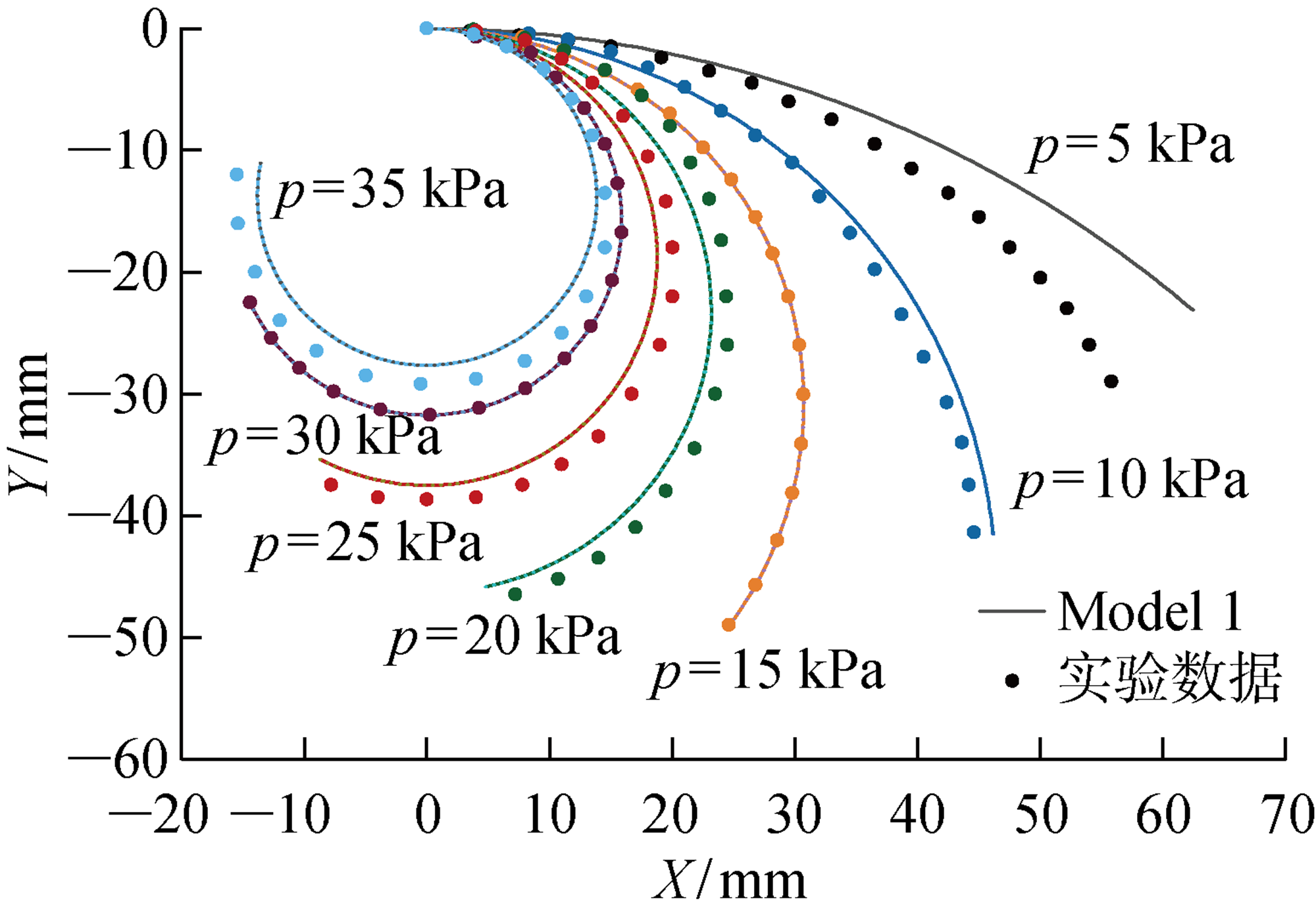
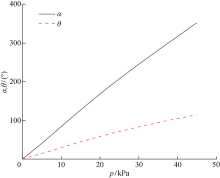
图15
Model 1的关系曲线


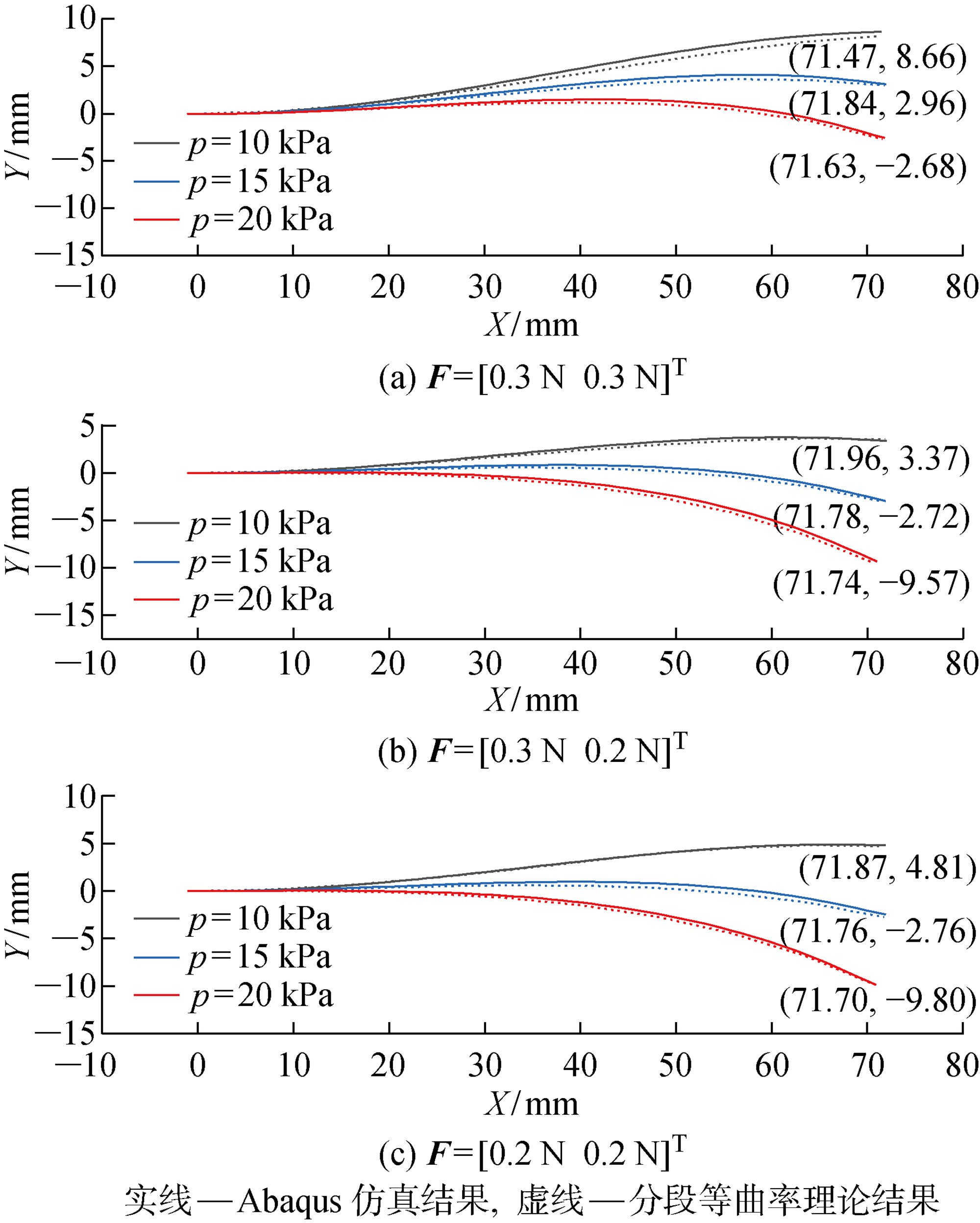
图16
固支-末端受载荷的软体驱动器变曲率底层构型
| [1] | 闵剑, 刘朝雨, 王江北, 等. 模块化软体机器人多模式运动分析[J]. 西安交通大学学报, 2020, 54(3): 126-133. |
| MIN Jian, LIU Zhaoyu, WANG Jiangbei, et al. Multi-mode motion analysis of modular soft robot[J]. Journal of Xi’an Jiaotong University, 2020, 54(3): 126-133. | |
| [2] | 徐丰羽, 孟凡昌, 范保杰, 等. 软体机器人驱动、建模与应用研究综述[J]. 南京邮电大学学报(自然科学版), 2019, 39(3): 64-75. |
| XU Fengyu, MENG Fanchang, FAN Baojie, et al. Review of driving methods, modeling and application in soft robots[J]. Journal of Nanjing University of Posts and Telecommunications (Natural Science Edition), 2019, 39(3): 64-75. | |
| [3] | JING W, CAPPELLERI D. A magnetic microrobot with in situ force sensing capabilities[J]. Robotics (Basel), 2014, 3(2): 106-119. |
| [4] | ROLF M, STEIL J J. Constant curvature continuum kinematics as fast approximate model for the Bionic Handling Assistant[C]//IEEE/RSJ International Conference on Intelligent Robots & Systems. Vilamoura, Portugal: IEEE, 2012: 3440-3446. |
| [5] | 蒋国平, 孟凡昌, 申景金, 等. 软体机器人运动学与动力学建模综述[J]. 南京邮电大学学报(自然科学版), 2018, 38(1): 20-26. |
| JIANG Guoping, MENG Fanchang, SHEN Jingjin, et al. Review on kinematics and dynamics modeling for soft robots[J]. Journal of Nanjing University of Posts and Telecommunications (Natural Science Edition), 2018, 38(1): 20-26. | |
| [6] |
POLYGERINOS P, WANG Z, OVERVELDE J T B, et al. Modeling of soft fiber-reinforced bending actuators[J]. Ieee Transactions on Robotics, 2015, 31(3): 778-789.
doi: 10.1109/TRO.2015.2428504 URL |
| [7] |
GU G, WANG D, GE L, et al. Analytical modeling and design of generalized pneu-net soft actuators with three-dimensional deformations[J]. Soft robotics, 2021, 8(4): 462-477.
doi: 10.1089/soro.2020.0039 URL |
| [8] |
ALICI G, CANTY T, MUTLU R, et al. Modeling and experimental evaluation of bending behavior of soft pneumatic actuators made of discrete actuation chambers[J]. Soft Robotics, 2018, 5(1): 24-35.
doi: 10.1089/soro.2016.0052 pmid: 29412079 |
| [9] |
WANG J, MIN J, FEI Y, et al. Study on nonlinear crawling locomotion of modular differential drive soft robot[J]. Nonlinear Dynamics, 2019, 97(2): 1107-1123.
doi: 10.1007/s11071-019-05035-0 |
| [10] |
ZHONG G, DOU W, ZHANG X, et al. Bending analysis and contact force modeling of soft pneumatic actuators with pleated structures[J]. International Journal of Mechanical Sciences, 2021, 193: 106150.
doi: 10.1016/j.ijmecsci.2020.106150 URL |
| [11] |
DE PAYREBRUNE K M, O’REILLY O M. On constitutive relations for a rod-based model of a pneu-net bending actuator[J]. Extreme Mechanics Letters, 2016, 8: 38-46.
doi: 10.1016/j.eml.2016.02.007 URL |
| [12] |
SHABANA A A, ELDEEB A E. Motion and shape control of soft robots and materials[J]. Nonlinear Dynamics, 2021, 104(1): 165-189.
doi: 10.1007/s11071-021-06272-y |
| [13] | 徐齐平, 刘锦阳. 多腔体气动软体驱动器的建模与仿真[J]. 上海交通大学学报, 2020, 54(6): 551-561. |
| XU Qiping, LIU Jinyang. Modeling and simulation of pneumatic soft actuator with multiple chambers[J]. Journal of Shanghai Jiao Tong University, 2020, 54(6): 551-561. | |
| [14] |
MARECHAL L, BALLAND P, LINDENROTH L, et al. Toward a common framework and database of materials for soft robotics[J]. Soft robotics, 2021, 8(3): 284-297.
doi: 10.1089/soro.2019.0115 URL |
| [1] | 庄浩宇, 颜国正, 费倩, 汪炜, 赵凯. 肠道机器人无线供能的混合式三维发射线圈特性研究[J]. 上海交通大学学报, 2023, 57(5): 545-551. |
| [2] | 张文安, 高伟展, 刘安东. 基于动态运动原语和自适应控制的机器人技能学习[J]. 上海交通大学学报, 2023, 57(3): 354-365. |
| [3] | 林淳, 贺越生, 方兴其, 王春香. 一种面向泊车场景智能车辆轨迹规划方法[J]. 上海交通大学学报, 2023, 57(3): 345-353. |
| [4] | 韩超, 陈敏, 黄宇昊, 赵明辉, 杜乾坤, 梁庆华. 基于全局特征描述子的激光SLAM回环检测方法[J]. 上海交通大学学报, 2022, 56(10): 1379-1387. |
| [5] | 王宇轩, 刘朝雨, 王江北, 费燕琼. 具有多地形运动能力的双模块软体机器人[J]. 上海交通大学学报, 2022, 56(10): 1388-1396. |
| [6] | 黄宇昊, 韩超, 赵明辉, 杜乾坤, 王石刚. 考虑安全飞行通道约束的无人机飞行轨迹多目标优化策略[J]. 上海交通大学学报, 2022, 56(8): 1024-1033. |
| [7] | 姜宇迪, 胡晖, 殷跃红. 基于无监督迁移学习的电梯制动器剩余寿命预测[J]. 上海交通大学学报, 2021, 55(11): 1408-1416. |
| [8] | 齐东润, 陈刚. 无人驾驶机器人多目标模糊操纵策略[J]. 上海交通大学学报, 2021, 55(10): 1310-1319. |
| [9] | 薛蓉蓉, 王志武, 颜国正, 庄浩宇. 肠道机器人获取的肠道图像降噪处理方法[J]. 上海交通大学学报, 2021, 55(10): 1303-1309. |
| [10] | 胡益恺, 王春香, 杨明. 智能车辆决策方法研究综述[J]. 上海交通大学学报, 2021, 55(8): 1035-1048. |
| [11] | 任书锋, 杨丹, 余海东, 王皓. 空间两刚体滚动约束系统在线运动规划[J]. 上海交通大学学报, 2021, 55(8): 1009-1017. |
| [12] | 滕亚军, 陈务军, 杨天洋, 敬忠良, 刘物己. SMA弹簧驱动的柔性操控臂动力学分析[J]. 上海交通大学学报, 2021, 55(8): 1018-1026. |
| [13] | 胡益恺, 庄瀚洋, 王春香, 杨明. 基于主从博弈的智能车汇流场景决策方法[J]. 上海交通大学学报, 2021, 55(8): 1027-1034. |
| [14] | 李鹏, 阮晓钢, 朱晓庆, 柴洁, 任顶奇, 刘鹏飞. 基于深度强化学习的区域化视觉导航方法[J]. 上海交通大学学报, 2021, 55(5): 575-585. |
| [15] | 雷静桃, 张悦文, 戴臻豪, 徐子力. 仿生气动肌纤维静态特性建模与实验研究[J]. 上海交通大学学报, 2021, 55(5): 566-574. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||