上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (5): 594-603.doi: 10.16183/j.cnki.jsjtu.2021.108
姜俊豪, 陈刚( )
)
收稿日期:2021-04-09
出版日期:2022-05-28
发布日期:2022-06-07
通讯作者:
陈刚
E-mail:gang0418@163.com
作者简介:姜俊豪(1997-) 男,浙江省温州市人,硕士生,主要从事驾驶机器人研究.
基金资助:
JIANG Junhao, CHEN Gang()
Received:2021-04-09
Online:2022-05-28
Published:2022-06-07
Contact:
CHEN Gang
E-mail:gang0418@163.com
摘要:
为实现驾驶机器人对试验车辆进行精确的转向操纵,提出了一种驾驶机器人转向操纵的动态模型预测控制方法.建立了驾驶机器人与被操纵车辆的耦合动力学模型,并对耦合模型的可控性进行判别.利用卡尔曼滤波器对耦合模型进行状态估计,并结合估计状态设计了模型预测控制器.将最小二乘法用于路径曲率与预测时域的非线性关系的拟合,设计了具有可变预测时域的动态模型预测控制器.进行了不同驾驶工况下的驾驶机器人转向操纵仿真与试验,研究结果表明了所提方法的有效性.
中图分类号:
姜俊豪, 陈刚. 驾驶机器人转向操纵的动态模型预测控制方法[J]. 上海交通大学学报, 2022, 56(5): 594-603.
JIANG Junhao, CHEN Gang. Dynamic Model Predictive Control Method for Steering Control of Driving Robot[J]. Journal of Shanghai Jiao Tong University, 2022, 56(5): 594-603.

图1
驾驶机器人整体结构
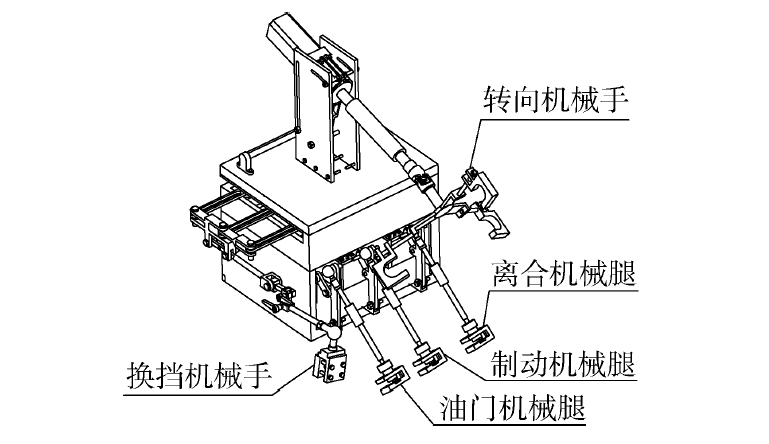
图2
转向机械手结构
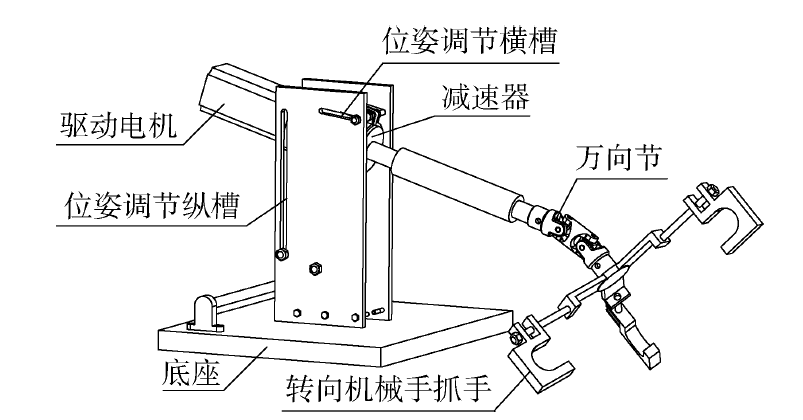
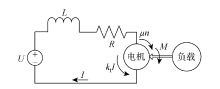
图3
转向机械手驱动电机等效电路
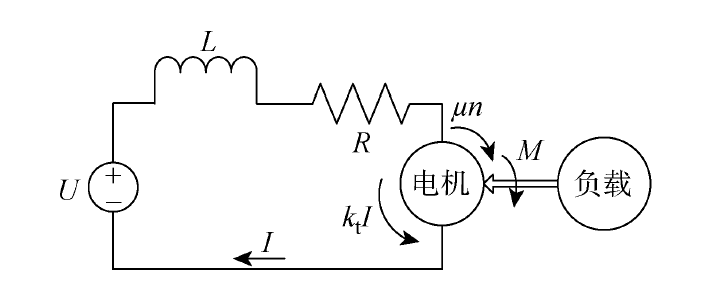
图4
被操纵车辆模型
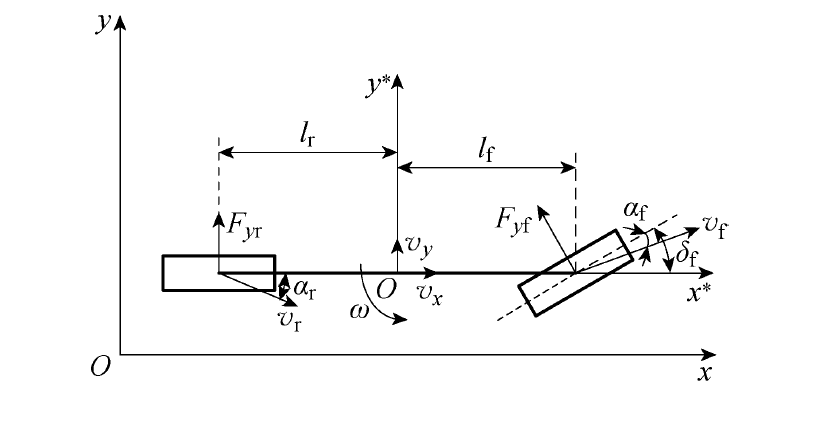
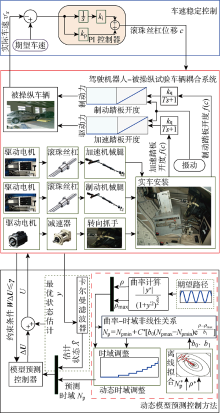
图5
驾驶机器人-被操纵车辆动态模型预测控制结构图
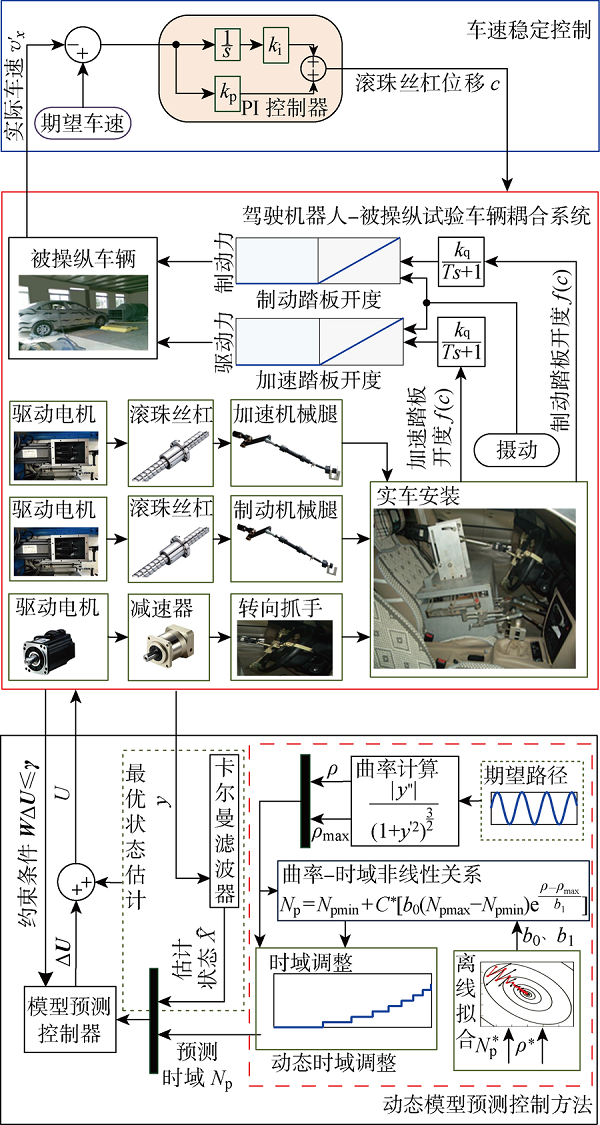
表1
时域数据
| ρ/m-1 | | ρ/m-1 | |
|---|---|---|---|
| 0 | 8 | 0.14 | 12 |
| 0.02 | 9 | 0.16 | 13 |
| 0.04 | 10 | 0.18 | 14 |
| 0.06 | 10 | 0.20 | 15 |
| 0.08 | 11 | 0.22 | 17 |
| 0.10 | 11 | 0.24 | 18 |
| 0.12 | 12 |
表2
拟合结果
| 参数 | 最终值 | 95%置信区间 |
|---|---|---|
| b0 | 0.1016 | (0.07692, 0.1264) |
| b1 | 0.1089 | (0.09469, 0.1231) |
表3
拟合结果评价
| 评价指标 | 取值 |
|---|---|
| 均方根误差 | 0.44 |
| 确定系数 | 0.98 |
| 自由度调整确定系数 | 0.97 |
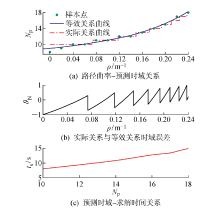
图6
预测时域调整方法结果


图7
驾驶机器人在试验车辆上的安装

表4
关键参数
| 对象 | 参数 | 数值 | 对象 | 参数 | 数值 |
|---|---|---|---|---|---|
| 驾驶机器人 | L/H | 0.012 | 驾驶机器人 | μ/(N·m·rpm-1) | 0.05 |
| kt/(N·m·A-1) | 0.47 | R/Ω | 0.42 | ||
| ke/[V·(rad·s)-1] | 0.0172 | i0 | 15 | ||
| 被操纵车辆 | m/kg | 1126 | 被操纵车辆 | K0/(N·m·rad-1) | 6000 |
| lf/m | 1.014 | Je/(kg·m2) | 14 | ||
| lr/m | 1.534 | e/m | 0.0035 | ||
| Kf/(N·rad-1) | 51480 | Jz/(kg·m2) | 2697 | ||
| Kr/(N·rad-1) | 87416 | ie | 20 | ||
| 控制器 | ΔUmax/V | 3 | 控制器 | Npmin | 8 |
| ΔUmin/V | -3 | | 20000 | ||
| Umax/V | 24 | | 0.1 | ||
| Umin/V | -24 | Nc | 10 | ||
| Npmax | 19 |

图8
双移线工况试验结果
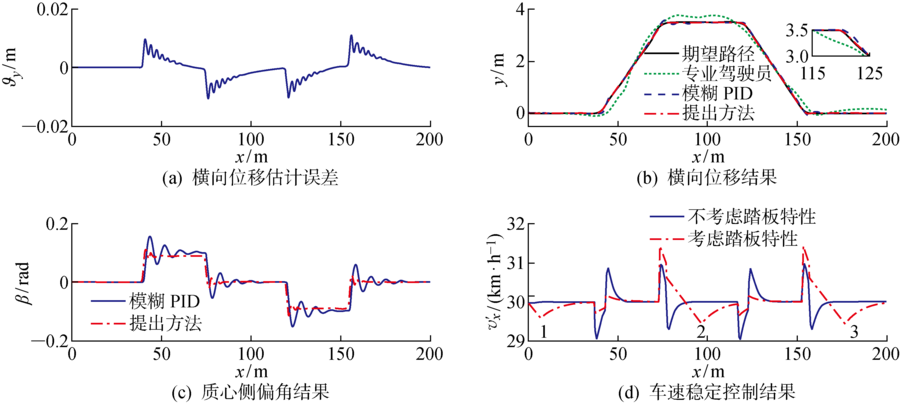
表5
PI控制器参数调整结果
| 工况 | kp | ki |
|---|---|---|
| 不考虑踏板特性 | 160.5 | 424.9 |
| 考虑踏板特性 | 193.9 | 465.9 |

图9
移线工况试验结果

| [1] |
CHEN G, ZHANG W G. Hierarchical coordinated control method for unmanned robot applied to automotive test[J]. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1039-1051.
doi: 10.1109/TIE.2015.2477266 URL |
| [2] |
ALT B, HERMANN E, SVARICEK F. Second order sliding modes control for rope winch based automotive driver robot[J]. International Journal of Vehicle Design, 2013, 62(2/3/4): 147.
doi: 10.1504/IJVD.2013.052707 URL |
| [3] |
HUANG X N, ZHANG S, PENG H E. Developing robot driver etiquette based on naturalistic human driving behavior[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(4): 1393-1403.
doi: 10.1109/TITS.2019.2913102 URL |
| [4] | 刘坤明, 徐国艳, 余贵珍. 驾驶机器人机械腿动力学建模与仿真分析[J]. 北京航空航天大学学报, 2016, 42(8): 1709-1714. |
| LIU Kunming, XU Guoyan, YU Guizhen. Dynamics modeling and simulation analysis of robot driver’s mechanical legs[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(8): 1709-1714. | |
| [5] |
ZHU Y H, FU Z Y, FU Z, et al. Multi-features fusion for diagnosis of pedal robot using time-speed signals[J]. Sensors, 2019, 19(1): 163-176.
doi: 10.3390/s19010163 URL |
| [6] |
CHEN G, CHEN S B, LANGARI R, et al. Driver-behavior-based adaptive steering robust nonlinear control of unmanned driving robotic vehicle with modeling uncertainties and disturbance observer[J]. IEEE Transactions on Vehicular Technology, 2019, 68(8): 8183-8190.
doi: 10.1109/TVT.2019.2922452 URL |
| [7] |
WONG N, CHAMBERS C, STOL K, et al. Development of a robotic driver for autonomous vehicle following[J]. International Journal of Intelligent Systems Technologies and Applications, 2010, 8(1/2/3/4): 276.
doi: 10.1504/IJISTA.2010.030205 URL |
| [8] | 吴俊, 陈刚. 驾驶机器人车辆的多模式切换控制[J]. 汽车工程, 2018, 40(10): 1215-1222. |
| WU Jun, CHEN Gang. Multi-mode switching control for robot driven vehicles[J]. Automotive Engineering, 2018, 40(10): 1215-1222. | |
| [9] | SPENCER M, JONES D, KRAEHLING M, et al. Trajectory based autonomous vehicle following using a robotic driver[C]// 2009 Australasian Conference on Robotics and Automation. Sydney, Australia: ARAA, 2009: 325-335. |
| [10] | 余贵珍, 俞志华, 康乐, 等. 一种用于车辆道路试验的自动驾驶机器人: CN 102435442 B[P]. 2013-11-13[2021-03-24]. |
| YU Guizhen, YU Zhihua, KANG Le, et al. Automatic drive robot used in vehicle road tests: CN 102435442 B[P]. 2013-11-13[2021-03-24]. | |
| [11] |
SU S H, CHEN G. Lateral robust iterative learning control for unmanned driving robot vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2020, 234(7): 792-808.
doi: 10.1177/0959651820904834 URL |
| [12] | WONG N, CHAMBERS C, STOL K, et al. Autonomous vehicle following using a robotic driver[C]// 2008 15th International Conference on Mechatronics and Machine Vision in Practice. Auckland, New Zealand: IEEE, 2008: 115-120. |
| [13] |
ZHANG B, ZONG C F, CHEN G Y, et al. An adaptive-prediction-horizon model prediction control for path tracking in a four-wheel independent control electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(12): 3246-3262.
doi: 10.1177/0954407018821527 URL |
| [14] | 何德峰, 彭彬彬, 顾煜佳, 等. 基于高斯过程回归的车辆巡航系统学习预测控制[J]. 上海交通大学学报, 2020, 54(9): 904-909. |
| HE Defeng, PENG Binbin, GU Yujia, et al. Learning predictive control of vehicular automated cruise systems based on Gaussian process regression[J]. Journal of Shanghai Jiao Tong University, 2020, 54(9): 904-909. | |
| [15] | 曹阳, 贺登博, 喻凡, 等. 基于主动转向的车辆路径跟随广义预测控制[J]. 上海交通大学学报, 2016, 50(3): 401-406. |
| CAO Yang, HE Dengbo, YU Fan, et al. Generalized predictive control based on vehicle path following strategy by using active steering system[J]. Journal of Shanghai Jiao Tong University, 2016, 50(3): 401-406. | |
| [16] | 中华人民共和国生态环境部. 轻型车辆污染物排放限值及测量方法(中国第六阶段)[S]. 北京: 中国环境科学出版集团, 2016. |
| Ministry of Ecology and Environment of the People’s Republic of China. Limits and measurement methods for emissions from light-duty vehicles (CHINA 6) [S]. Beijing: China Environmental Publishing Group, 2016. | |
| [17] |
陈刚, 王和荣. 驾驶机器人车辆动态制动力矩补偿[J]. 中国公路学报, 2020, 33(2): 181-190.
doi: 10.19721/j.cnki.1001-7372.2020.02.017 |
|
CHEN Gang, WANG Herong. Dynamic braking torque compensation for a driving robot vehicle[J]. China Journal of Highway and Transport, 2020, 33(2): 181-190.
doi: 10.19721/j.cnki.1001-7372.2020.02.017 |
|
| [18] |
LIU Y, ZONG C F, ZHANG D. Lateral control system for vehicle platoon considering vehicle dynamic characteristics[J]. IET Intelligent Transport Systems, 2019, 13(9): 1356-1364.
doi: 10.1049/iet-its.2018.5504 URL |
| [19] | International Standard Organization. Passenger cars—Test track for a serve lane-change manoeuvre—Part 1: Double lane-change: ISO 3888-1 [S]. Switzerland: ISO Copyright Office, 2018. |
| [1] | 齐东润, 陈刚. 无人驾驶机器人多目标模糊操纵策略[J]. 上海交通大学学报, 2021, 55(10): 1310-1319. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||