上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (10): 1210-1218.doi: 10.16183/j.cnki.jsjtu.2020.182
所属专题: 《上海交通大学学报》2021年“交通运输工程”专题; 《上海交通大学学报》2021年12期专题汇总专辑
刘文通, 陈俐( ), 陈峻
), 陈峻
收稿日期:2020-06-15
出版日期:2021-10-28
发布日期:2021-11-01
通讯作者:
陈俐
E-mail:li.h.chen@sjtu.edu.cn
作者简介:刘文通(1997-),男,河南省驻马店市人,硕士生,研究方向为车辆动力学与控制.
基金资助:
LIU Wentong, CHEN Li(), CHEN Jun
Received:2020-06-15
Online:2021-10-28
Published:2021-11-01
Contact:
CHEN Li
E-mail:li.h.chen@sjtu.edu.cn
摘要:
针对线控转向系统中的未知与不确定延迟,基于内模控制思想设计自适应控制策略,提高转角跟踪精度.为避免引入非最小相位项,提出采用全极点方法近似延迟环节,将延迟模型与线控转向系统模型相结合,构建新的名义模型,引入Kalman滤波方法辨识名义模型参数,实时更新内模控制的逆控制器增益.仿真和台架试验结果表明,与逆控制器未计入延迟的传统内模控制和经典比例、积分、微分(PID)控制相比较,考虑延迟的自适应内模控制跟踪误差较小,对延迟变化的适应能力较强.
中图分类号:
刘文通, 陈俐, 陈峻. 考虑延迟的汽车线控转向系统自适应内模控制[J]. 上海交通大学学报, 2021, 55(10): 1210-1218.
LIU Wentong, CHEN Li, CHEN Jun. Adaptive Internal Model Control for Automotive Steer-by-Wire System with Time Delay[J]. Journal of Shanghai Jiao Tong University, 2021, 55(10): 1210-1218.

图1
转向执行系统物理模型
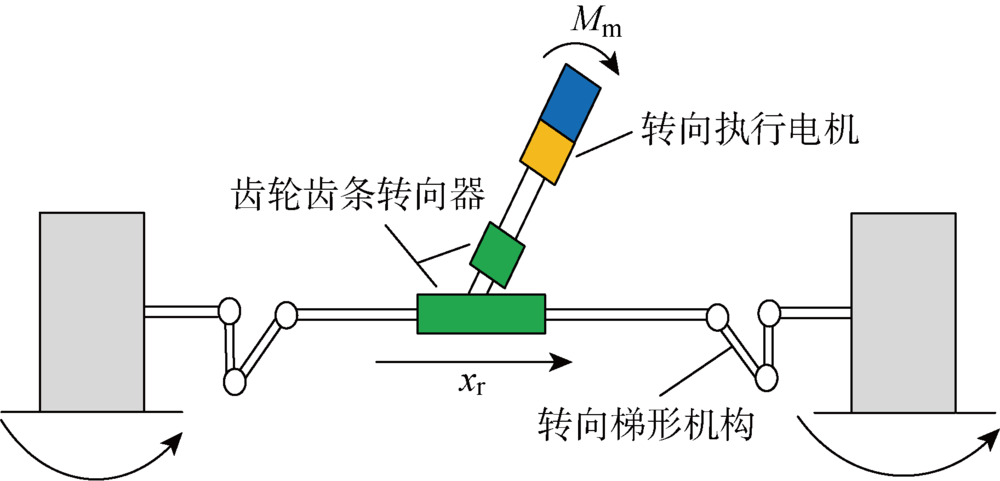

图2
自适应内模控制框图
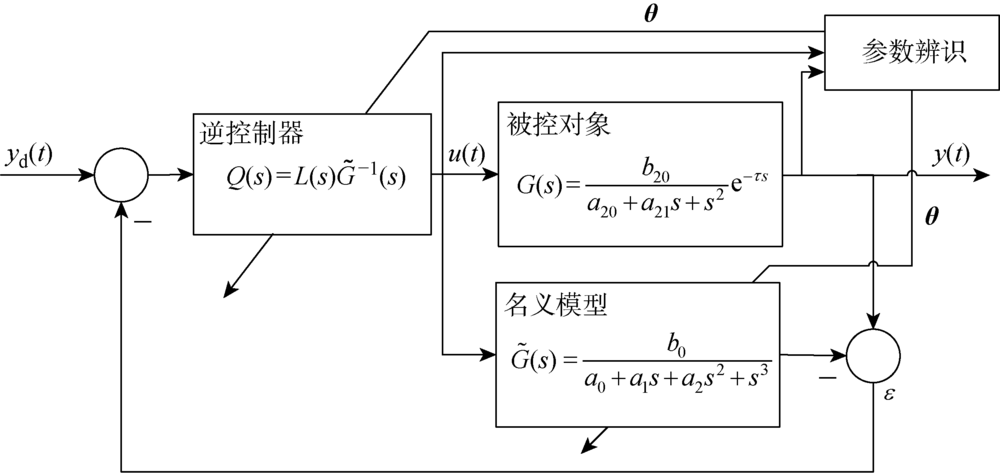
表1
仿真参数设置
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| a20 | 0.1309 | a21 | 32.87 |
| b20 | 1107 | R1 | |
| P0 | | R2 | 1 |
| λ | 10 | λ1 | 10 |
| n | 3 | Δt/ms | 1 |

图3
τ=50 ms时的仿真结果
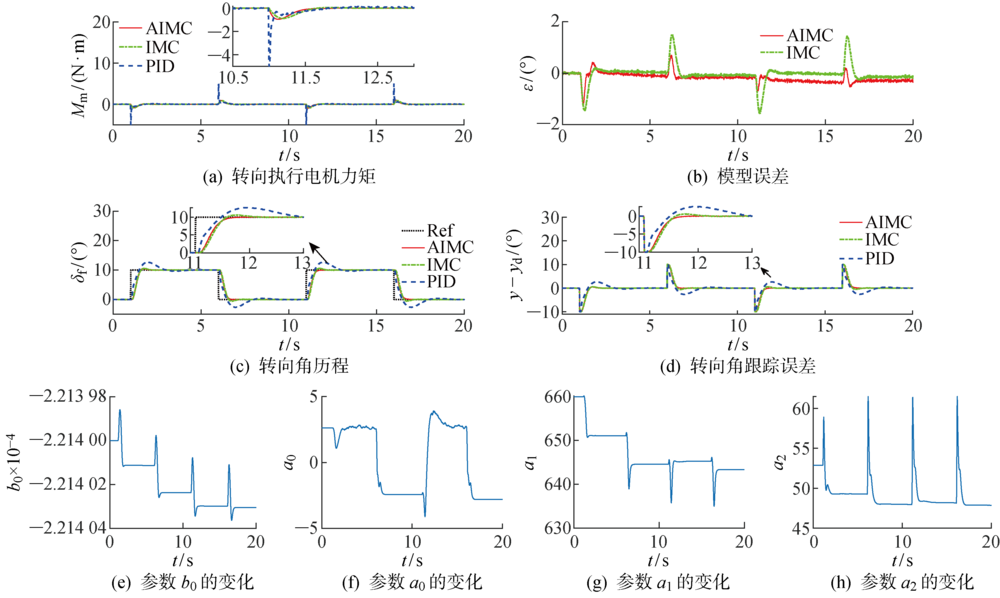

图4
τ=100 ms时的仿真结果
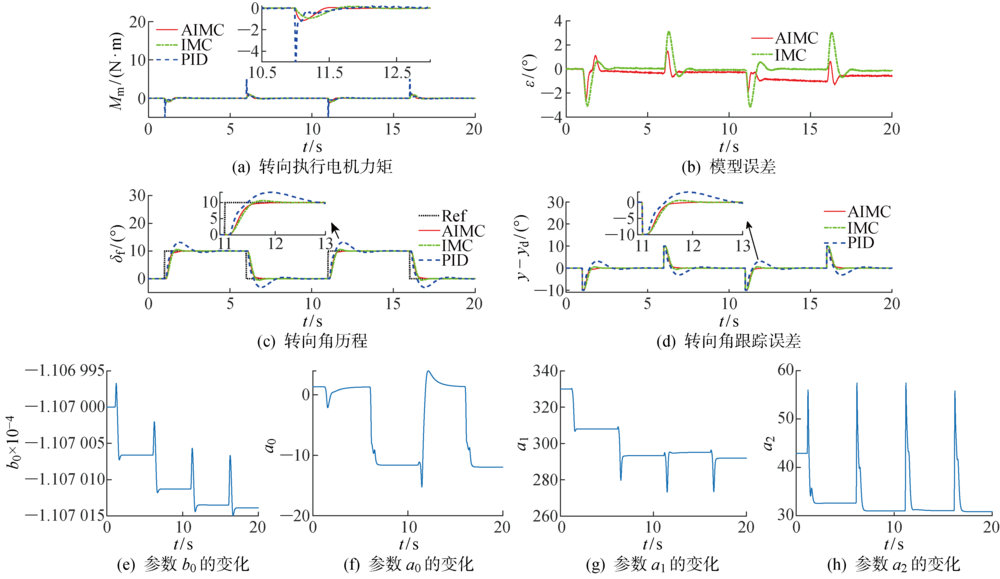
表2
仿真结果
| τ/ms | 控制算法 | t1/s | t2/s | ω/(°) |
|---|---|---|---|---|
| 50 | AIMC | 0.85 | 1.06 | 0 |
| IMC | 0.58 | 1.33 | 0.535 | |
| PID | 0.48 | 3.63 | 2.694 | |
| 100 | AIMC | 0.64 | 1.24 | 0.011 |
| IMC | 0.55 | 1.80 | 1.715 | |
| PID | 0.45 | 4.88 | 3.167 |
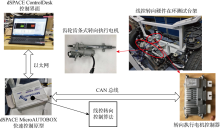
图5
线控转向试验台架
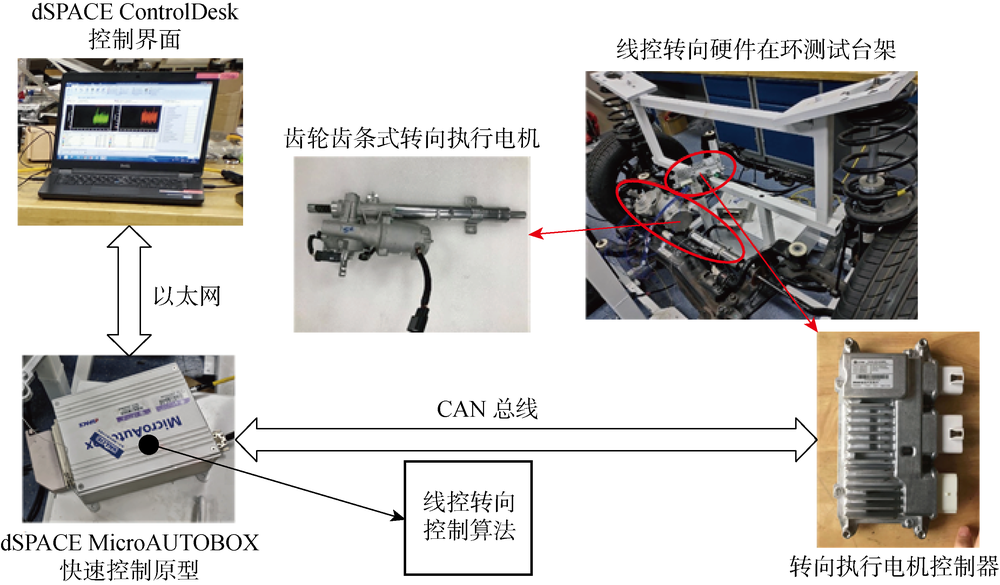

图6
τ=0 ms时的台架试验结果
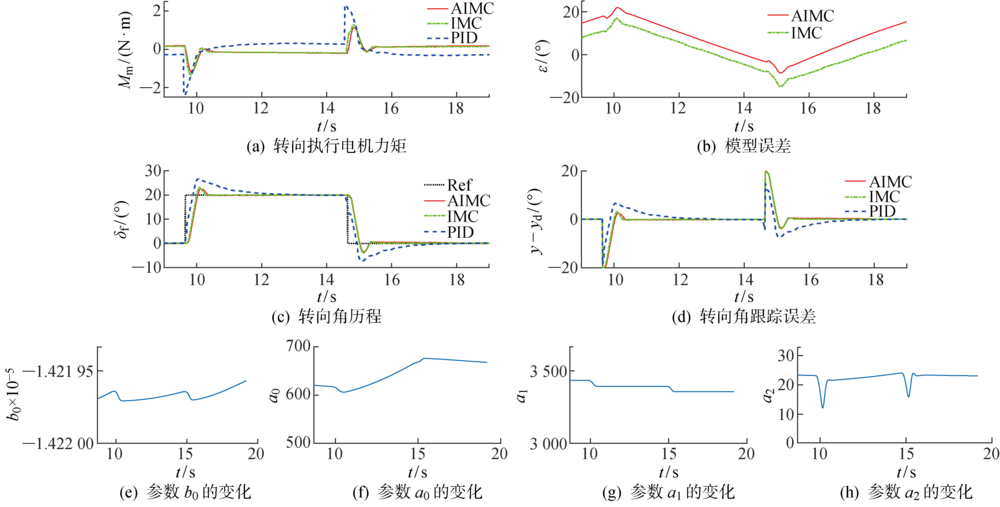

图7
τ=100 ms时的台架试验结果
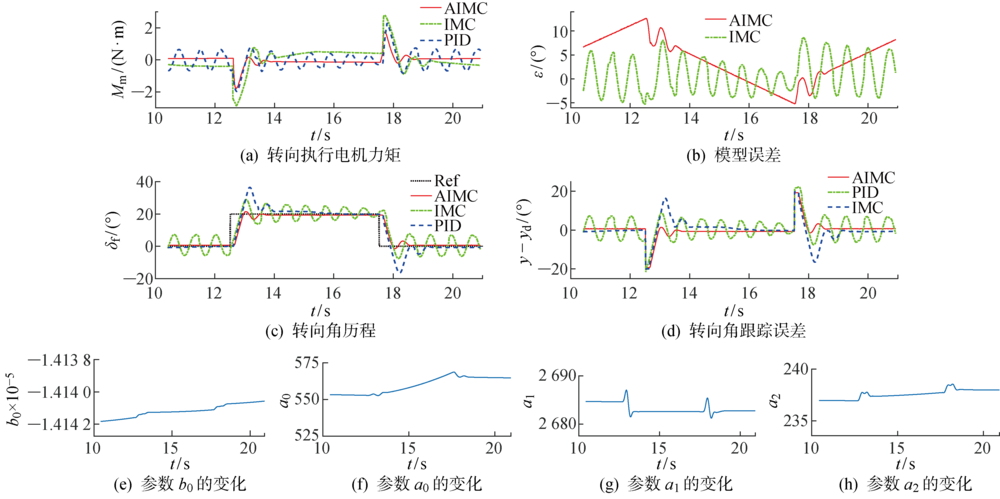
表3
试验结果
| τ/ms | 控制算法 | t1/s | t2/s | ω/(°) |
|---|---|---|---|---|
| 0 | AIMC | 0.44 | 0.77 | 0.658 |
| IMC | 0.43 | 0.84 | 1.241 | |
| PID | 0.30 | 4.60 | 2.123 | |
| 100 | AIMC | 0.45 | 1.21 | 1.487 |
| IMC | 0.42 | ∞ | 8.941 | |
| PID | 0.34 | 4.95 | 10.172 |
| [1] | 季学武, 刘亚辉, 杨恺明, 等. 乘用车电控转向系统的发展趋势[J]. 汽车安全与节能学报, 2015, 6(3):208-216. |
| JI Xuewu, LIU Yahui, YANG Kaiming, et al. Trend of passenger car steering system with electronic control[J]. Journal of Automotive Safety and Energy, 2015, 6(3):208-216. | |
| [2] | 陈俐, 李雄, 程小宣, 等. 汽车线控转向系统研究进展综述[J]. 汽车技术, 2018(4):23-34. |
| CHEN Li, LI Xiong, CHENG Xiaoxuan, et al. Review on research progress of automobile steer-by-wire system[J]. Automobile Technology, 2018(4):23-34. | |
| [3] | 蔡国平, 陈龙祥. 时滞反馈控制及其实验[M]. 北京: 科学出版社, 2017. |
| CAI Guoping, CHEN Longxiang. Delayed feedback control and experiments[M]. Beijing: Science Press, 2017. | |
| [4] | ZHANG L J, WANG L F, LIAO C L. Reliability research for steer-by-wire system of electric vehicle[C]// 2009 Asia-Pacific Power and Energy Engineering Conference. Wuhan, China: IEEE, 2009: 10662527. |
| [5] | ZHAO L, PING P W. A stability and tansparency analysis of steer-by-wire system based on the bilateral control and dual-port network theory[C]// 2010 International Conference on Electrical and Control Engineering. Wuhan, China: IEEE, 2010: 11647898. |
| [6] | ZAKARIA M L, HUSAIN A R, MOHAMED Z, et al. Lyapunov-Krasovskii stability condition for system with bounded delay—An application to steer-by-wire system[C]// 2015 IEEE International Conference on Control System, Computing and Engineering (ICCSCE). George Town, Malaysia: IEEE, 2015: 16052538. |
| [7] | HUANG C, DU H P, NAGHDY F, et al. Robust fuzzy tracking control of uncertain steer-by-wire systems with network time delays[C]// 2015 Australasian Universities Power Engineering Conference (AUPEC). Wollongong, NSW, Australia: IEEE, 2015: 15588282. |
| [8] | LAVRETSKY E, WISE K A. Robust adaptive control[M]. London, UK: Springer, 2013. |
| [9] | KARNIK A Y, JANKOVIC M. IMC based wastegate control using a first order model for turbocharged gasoline engine[C]// 2012 American Control Conference (ACC). Montreal, QC, Canada: IEEE, 2012: 13036112. |
| [10] | 温馨, 石红瑞. 积分过程的二自由度PID控制及应用[J]. 控制工程, 2013, 20(Sup.1):206-208. |
| WEN Xin, SHI Hongrui. Two degree of freedom PID control for integral processes and its application[J]. Control Engineering of China, 2013, 20(Sup.1):206-208. | |
| [11] | XU L, GE S Q, GUO J Y. Application of self-adaptive TDF-IMC in grinding classification process[C]// 2018 Chinese Control and Decision Conference (CCDC). Shenyang, China: IEEE, 2018: 17914530. |
| [12] | BEDOUI S, ABDERRAHIM K. ARMAX time delay systems identification based on least square approach[J]. IFAC-PapersOnLine, 2015, 48(28):1100-1105. |
| [13] |
LIN Q, LOXTON R, XU C, et al. Parameter estimation for nonlinear time-delay systems with noisy output measurements[J]. Automatica, 2015, 60:48-56.
doi: 10.1016/j.automatica.2015.06.028 URL |
| [14] |
LIU T, WANG Q G, HUANG H P. A tutorial review on process identification from step or relay feedback test[J]. Journal of Process Control, 2013, 23(10):1597-1623.
doi: 10.1016/j.jprocont.2013.08.003 URL |
| [15] |
LI L J, DONG T T, ZHANG S, et al. Time-delay identification in dynamic processes with disturbance via correlation analysis[J]. Control Engineering Practice, 2017, 62:92-101.
doi: 10.1016/j.conengprac.2017.03.007 URL |
| [16] | 邹村, 王爽心, 杨志远. 基于时变时滞系统自适应内模控制研究[J]. 自动化与仪器仪表, 1997(3):10-12. |
| ZOU Cun, WANG Shuangxin, YANG Zhiyuan. An adaptive internal model control(IMC) for time varying delay system[J]. Automation and Instrumentation, 1997(3):10-12. | |
| [17] | 贾立, 杨智. 基于神经网络的时变时滞系统自适应内模控制[J]. 甘肃工业大学学报, 2000, 26(1):69-75. |
| JIA Li, YANG Zhi. Adaptive internal model control based on neural network for time varying delay systems[J]. Journal of Gansu University of Technology, 2000, 26(1):69-75. | |
| [18] |
KUMAR D B S, PADMA SREE R. Tuning of IMC based PID controllers for integrating systems with time delay[J]. ISA Transactions, 2016, 63:242-255.
doi: 10.1016/j.isatra.2016.03.020 URL |
| [19] |
MURESAN C I, DUTTA A, DULF E H, et al. Tuning algorithms for fractional order internal model controllers for time delay processes[J]. International Journal of Control, 2016, 89(3):579-593.
doi: 10.1080/00207179.2015.1086027 URL |
| [20] | 叶政. PID控制器参数整定方法研究及其应用[D]. 北京: 北京邮电大学, 2016. |
| YE Zheng. PID controller parameter tuning method and application[D]. Beijing: Beijing University of Posts and Telecommunications, 2016. | |
| [21] | HAYKIN S. Kalman filtering and neural networks[M]. New York, USA: John Wiley & Sons, 2001. |
| [22] |
WANG H, MAN Z H, KONG H F, et al. Design and implementation of adaptive terminal sliding-mode control on a steer-by-wire equipped road vehicle[J]. IEEE Transactions on Industrial Electronics, 2016, 63(9):5774-5785.
doi: 10.1109/TIE.41 URL |
| [23] | 杨翔宇, 吕世明, 李楠, 等. 汽车转向系统回正力矩模型的比较及仿真研究[J]. 机械设计与制造, 2016(2):258-262. |
| YANG Xiangyu, LV Shiming, LI Nan, et al. Comparison and simulation of aligning torque models of vehicle steering system[J]. Machinery Design & Manufacture, 2016(2):258-262. | |
| [24] | 郑宏宇, 宗长富, 王祥. 汽车线控转向系统路感模拟方法[J]. 农业机械学报, 2011, 42(2):18-22. |
| ZHENG Hongyu, ZONG Changfu, WANG Xiang. Road feel design for vehicle steer-by-wire system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(2):18-22. | |
| [25] |
QIU Z, SANTILLO M, JANKOVIC M, et al. Composite adaptive internal model control and its application to boost pressure control of a turbocharged gasoline engine[J]. IEEE Transactions on Control Systems Technology, 2015, 23(6):2306-2315.
doi: 10.1109/TCST.2015.2414400 URL |
| [1] | 李双, 施建强. 基于新型双环控制的LC型逆变器研究[J]. 上海交通大学学报, 2022, 56(9): 1139-1147. |
| [2] | 陈昌川, 刘凯, 刘仁光, 冯晓棕, 覃延佳, 代少升, 张天骐. 基于多源局部放电信号数据流聚类分离方法[J]. 上海交通大学学报, 2022, 56(8): 1014-1023. |
| [3] | 欧阳旭宇, 常海超, 刘祖源, 冯佰威, 詹成胜, 程细得. 自适应采样方法在船型优化中的应用[J]. 上海交通大学学报, 2022, 56(7): 937-943. |
| [4] | 张绍广, 肖茂超, 张宇飞, 陈海昕. 细长旋成体大攻角非对称涡模拟的扰动引入方式研究[J]. 空天防御, 2022, 5(3): 10-16. |
| [5] | 丁明, 孟帅, 王书恒, 夏玺. 六自由度波浪补偿平台的神经网络自适应反馈线性化控制[J]. 上海交通大学学报, 2022, 56(2): 165-172. |
| [6] | 汤洪涛, 王丹南, 邵益平, 赵文彬, 江伟光, 陈青丰. 基于改进候鸟迁徙优化的多目标批量流混合流水车间调度[J]. 上海交通大学学报, 2022, 56(2): 201-213. |
| [7] | 张文佳, 马辛. 深空探测器接近段自主导航的滑动窗口自适应滤波方法[J]. 上海交通大学学报, 2022, 56(11): 1461-1469. |
| [8] | 周齐贤, 王寅, 孙学安. 基于增益自适应超螺旋滑模理论的无人机控制[J]. 上海交通大学学报, 2022, 56(11): 1453-1460. |
| [9] | 马航宇, 周笛, 卫宇杰, 吴伟, 潘尔顺. 变工况下基于自适应深度置信网络的轴承智能故障诊断[J]. 上海交通大学学报, 2022, 56(10): 1368-1377. |
| [10] | 刘静远, 王宁, 赵庆武, 熊勇, 程勇. 纳秒脉冲放电参数对点火性能的影响[J]. 上海交通大学学报, 2022, 56(1): 28-34. |
| [11] | 方明, 赵婵娟, 赵春雷, 徐安祺, 陈剑. 基于STAP的行进间车载雷达杂波抑制技术研究[J]. 空天防御, 2022, 5(1): 71-77. |
| [12] | 顾念祖, 陶青长, 邢飞, 孙炘, 吴志林, 尤政. 基于ESPRIT+GS-SMI算法的抗卫星导航欺骗干扰技术研[J]. 空天防御, 2022, 5(1): 78-85. |
| [13] | 金皓纯, 葛敏辉, 徐波. 基于极限学习机的双馈感应风力发电机综合自适应调频参数优化方法[J]. 上海交通大学学报, 2021, 55(S2): 42-50. |
| [14] | 张峻宁, 苏群星, 王成, 徐超, 李一宁. 一种改进变换网络的域自适应语义分割网络[J]. 上海交通大学学报, 2021, 55(9): 1158-1168. |
| [15] | 王悦行, 吴永国, 徐传刚. 基于深度迁移学习的红外舰船目标检测算法[J]. 空天防御, 2021, 4(4): 61-66. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||